引言
道路作为交通运输设施的主干结构与核心枢纽,快速准确地提取在地图更新、车辆导航、城市规划和灾害救援等领域均具有重要作用。道路提取是指将影像的每个像素分为道路和非道路(背景),受益于系列卷积神经网络在语义分割领域的发展进步、光学影像的直观性和其数据集的丰富性等客观现状,当前道路自动解译研究主要集中于光学影像驱动的深度学习法。
光学影像以地物反射可见光波段内的电磁波能量为依据,可视化地物的表层信息,具有空间分辨率高、光谱和纹理信息丰富等优点。但由于光学影像的获取方法是一种被动式手段,能量来源主要是太阳辐射,故光学影像的成像质量往往受天气影响较大。此外,因成像角度等因素的影响,投影误差、阴影特征等均会造成道路表面的属性特征与真实标签存在出入,为道路提取带来错误的信息引导。
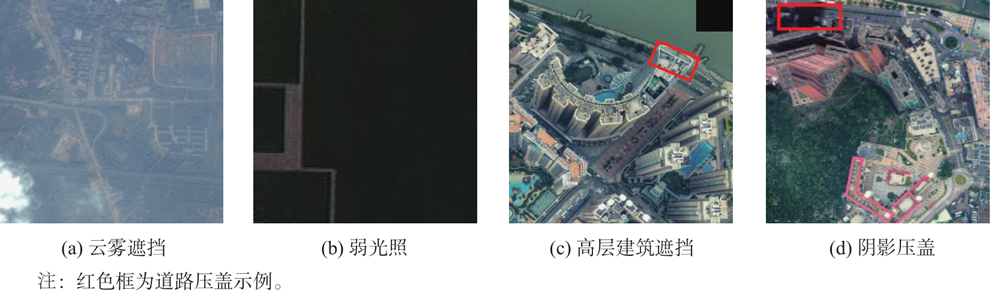
图1 光学影像局限性示例
SAR作为主动式成像,具备全天时全天候的数据获取能力,并能从侧视角度提供地物目标的散射和几何特征,但存在斑块噪声以及语义难解释等问题。总体来说,得益于应用需求的持续推进,体系化、多样化和成熟化的遥感数据获取系统不断涌现,遥感数据在电磁波谱的描述颗粒度和适应区间均取得重大突破。获取同一地区的多模态遥感影像更加容易,可以为地物解译提供更加多样的互补信息,如光学影像的光谱信息和SAR影像的散射信息等。