2 方法设计
2.1 应急通信车评价选址
通信设施选址需综合考量当前地形地势、安全系数、周围地理条件、周边用户分布、通信距离、通视条件等重要信息,应急通信车一般选为应急监测现场指挥中心。
采用选址点高程、选址点与道路最短距离、与所有监测任务点距离之和、可视域、地形起伏度为通信车选址评价指标。按照起伏度小于13 m、应急监测任务点视域比例不少于50%、路网缓冲区半径30 m的规则分别提取地形平坦区、视野开阔区和道路缓冲区,通信车选址的候选区域即为三者交集。
通信车选址评价指标:
- 选址点高程 (权重0.1)
- 与道路距离 (权重0.1)
- 与任务点距离之和 (权重0.2)
- 视域 (权重0.3)
- 地形起伏度 (权重0.3)
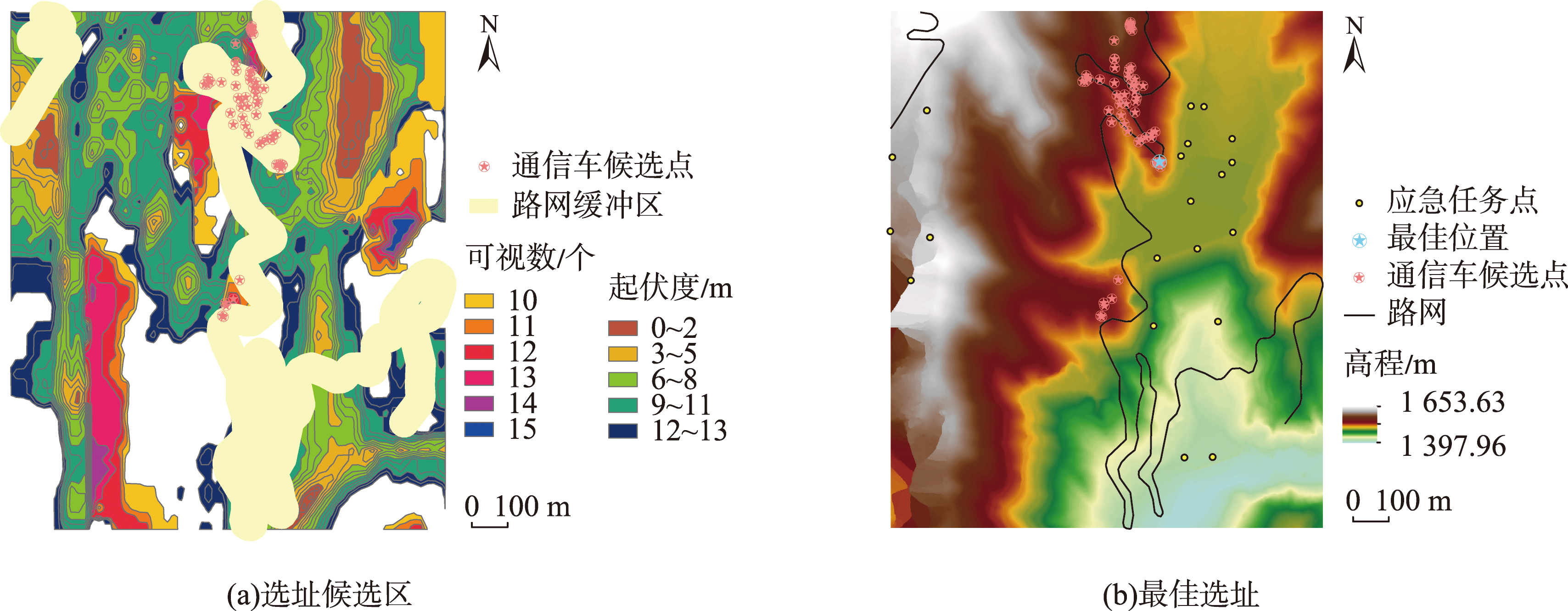
图1 应急通信车选址候选区及最佳选址方案
2.2 地空通信网智能部署
2.2.1 时空递阶染色体矩阵初始化
设计具有2层控制基因、一层参数基因的时空递阶染色体矩阵来存储应急监测人员和应急通信资源的位置、属性、链路,比传统递阶遗传算法的染色体排列结构更复杂。
表1 时空递阶染色体矩阵结构
| 时段a | 应急监测人员 | 通信车 | 通信无人机1 | 通信无人机2 |
|---|---|---|---|---|
| 时段a | 任务编号:12 坐标:94,23,1623.71,13.45 紧要程度:3 |
r:200, T:50, L:6 x,y,z:63,156,1523.74 链接:0 |
r:316, T:30, L:8 x,y,z:93,27,1646.26 链接:1 |
r:316, T:30, L:8 x,y,z:117,112,1562.19 链接:0 |
| 任务编号:13 坐标:112,12,1583.79,20.00 紧要程度:3 |
链接:0 | 链接:1 | 链接:0 |
2.2.2 种群适应度综合评价
应急通信资源协同动态部署属于多目标优化问题,算法设计涵盖时空覆盖度等6个指标的适应度评价模型,使地空通信网部署质量综合最优:
时空覆盖度Ω
用于评价地空通信网部署方案的通信覆盖完成率,由具有通信信号覆盖的应急监测任务数来衡量。
任务强度I
用于衡量全过程通信任务耗能、通信链路数,根据通信资源属性定义为覆盖半径和任务时长的函数。
信号干扰度φ
用于度量受通信节点位置、传输衰耗影响的通信链路信号强度,定义为链路距离、频谱效率的函数。
救急能力γ
用于考察是否优先满足紧要应急任务的通信覆盖和通信质量,对各任务按应急紧迫程度赋予不同权重。
任务均衡度τ
用于考量通信资源传输任务分配的均衡性,利用任务点通信链路差异量总和衡量资源分配集中程度。
移动成本ε
用于评判应急场景动态更新后能否以较小代价调整通信部署,由通信资源的累计位置变更距离评判。
2.2.3 种群协同进化机制
采用基于适应度排名的精英保留策略选择种群父体,将适应度排名前80%的个体选为子代种群参与后续遗传演化。对时空递阶染色体矩阵不同层级、不同类型的基因设计专门的知识型进化算子:
通信节点坐标基因进化
将通信节点坐标看作染色体粒子,在标准粒子群算法速度和位置更新公式基础上融入时间维度进化无人机时空坐标。
通信节点链接关系进化
基于进化的通信节点坐标基因,建立链接矩阵存储通信节点当前可覆盖的监测任务点,通信链接关系参数基因在链接矩阵约束下随机初始化和基因进化。
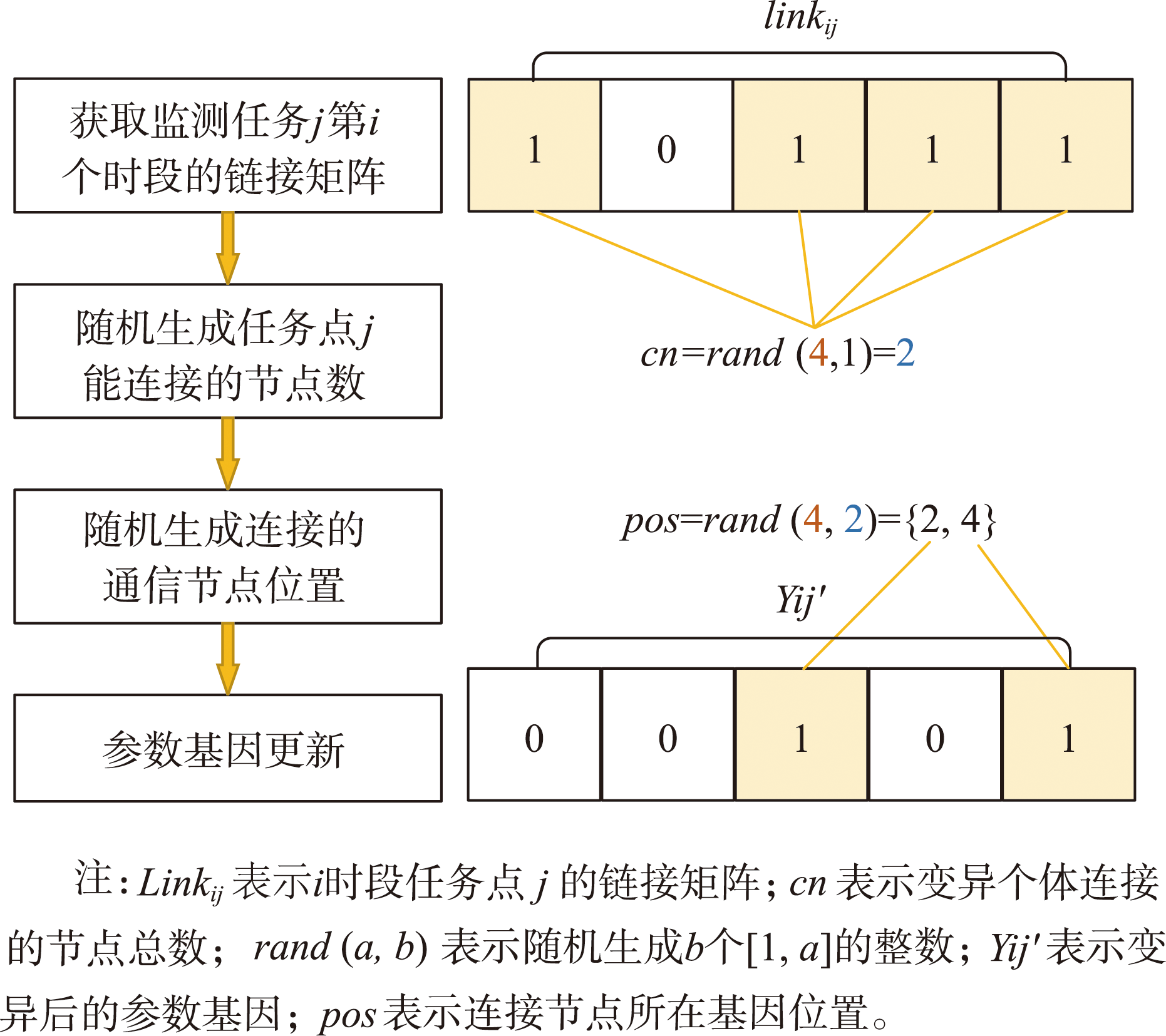
图2 通信链接关系参数基因变异过程
3 结果与分析
3.1 应急监测仿真实验环境
研究区位于新疆伊犁哈萨克自治州地区某金属型尾矿库,当地海拔较高且地形多褶皱山脉,面积约1.00×0.86 km²。数据源包括高德路网、DEM、DOM、DSM等。
表2 实验数据源
| 数据源 | 分辨率/m | 数据类型 |
|---|---|---|
| 高德路网 | - | 矢量 |
| DEM | 12.5 | 栅格 |
| DOM | 0.2 | 栅格 |
| DSM | 0.2 | 栅格 |
3.3 地空通信网最佳部署方案
3.3.1 算法适应度收敛能力
通过对比分析普通递阶遗传算法、随机搜索、通信覆盖优化、通信质量优化、通信时长优化的适应度收敛情况,测试本算法种群协同进化机制、适应度评价模型的优越性。
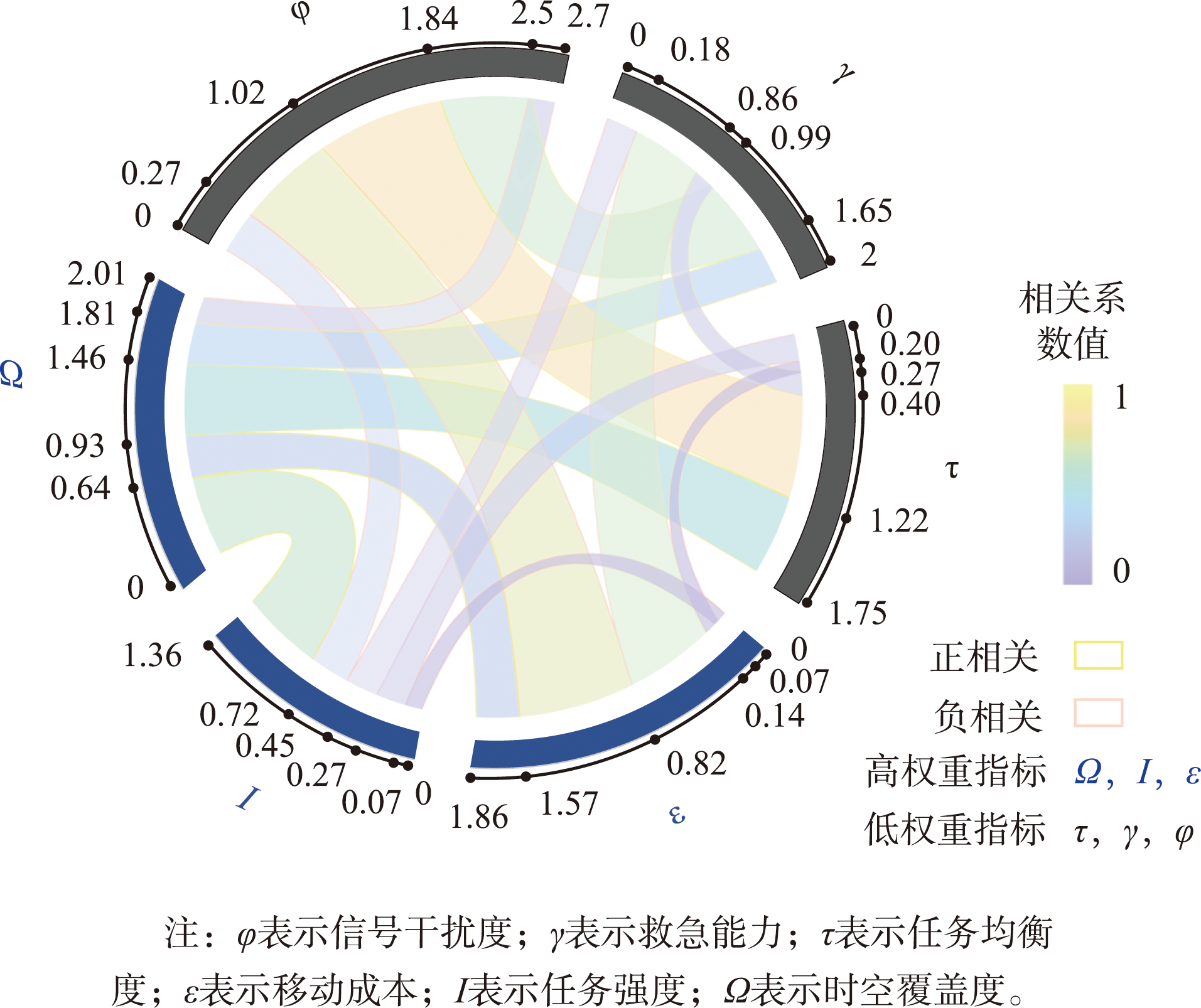
图3 适应度指标拐点相关系数
关键结果:
- 本算法历史最优适应度在第260次从初始值1.70收敛到2.21
- 适应度提升幅度约30%,耗时94.23秒
- 重复运行10次后最优适应度波动幅度未超过0.3
- 相比随机搜索、普通递阶遗传算法,本算法缩短运行时间的同时取得了更大适应值
3.3.2 算法动态场景应变性
通信网初次部署方案三维可视化仿真场景如图7(a)所示,通信无人机和通信车覆盖半径为1 225 m、200 m,2个时段内所有监测任务点均被覆盖。
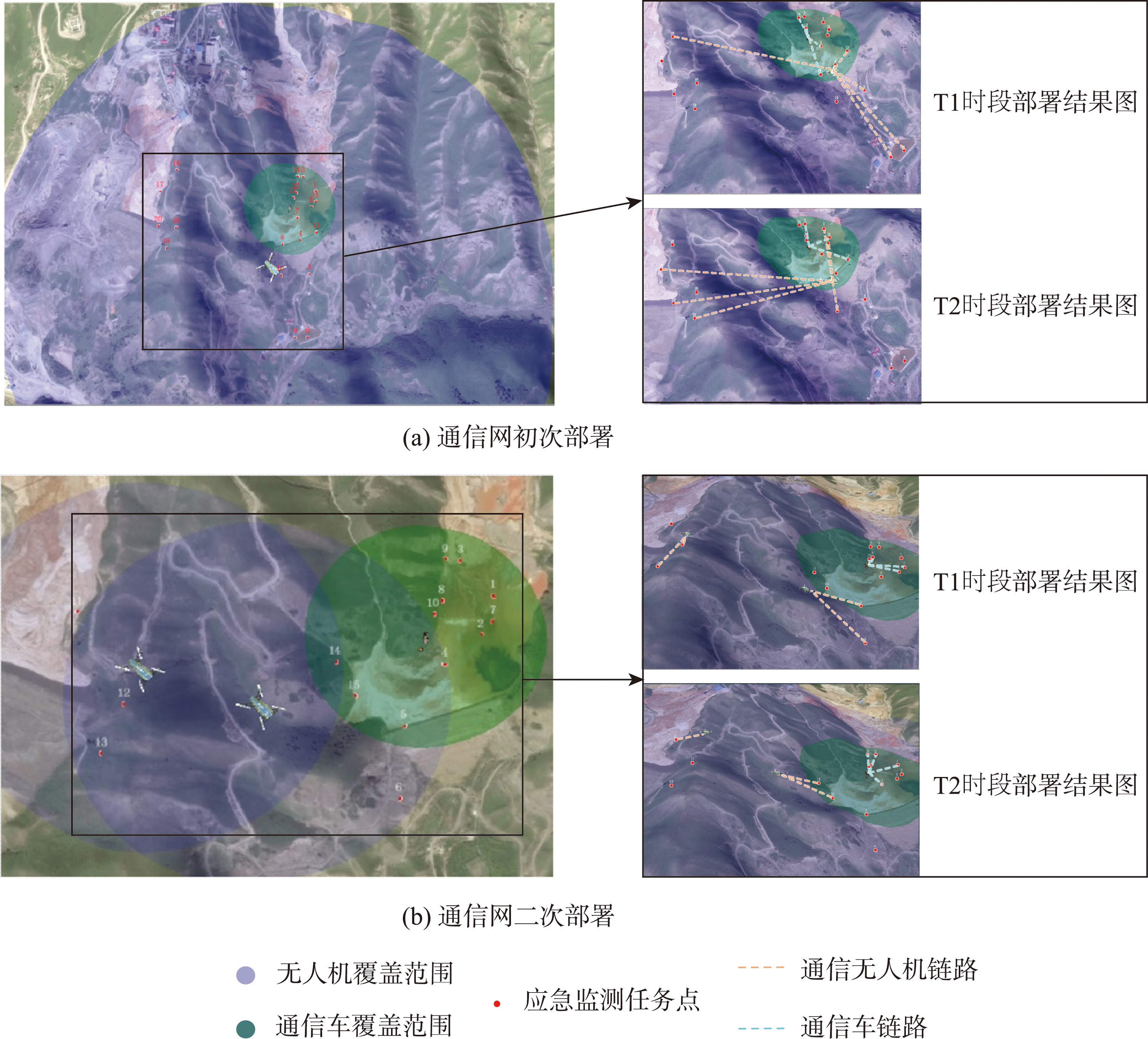
图4 通信网部署三维可视化
为测试算法能否应用于大规模通信网部署,将研究区面积扩大至9.37 km²,随机分布1 000个监测任务点并利用LKH求解器生成6个应急监测队伍的任务点最短遍历路线。
表3 不同场景通信网覆盖优化算法结果
| 通信资源 | 续航/min | 覆盖半径/m | 通信链路数 | 任务时长/min | 算法耗时/s | 最优适应度 |
|---|---|---|---|---|---|---|
| 无人机 | 30 | 1 225 | T1:6, T2:6 | 20.26 | 94.23 | 2.21 |
3.3.3 实地应急实验对比
将算法所推导的初次通信网部署方案与同样监测任务背景下新疆现场应急模拟实验的通信无人机航行轨迹进行对比。
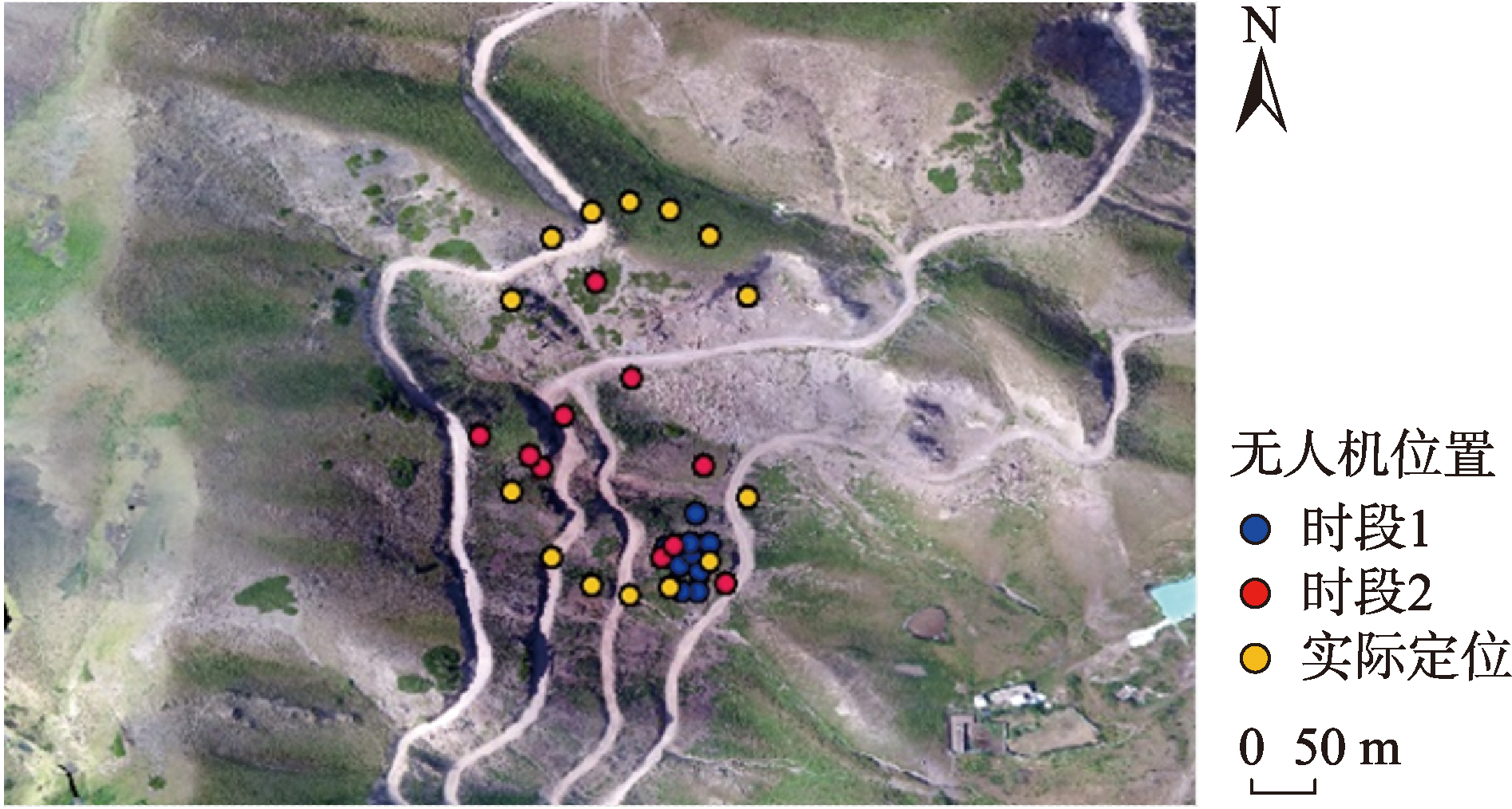
图5 算法初次部署方案与实地应急实验无人机位置对比
实验结果:
无人机实际定位处于本算法多次运行预测的无人机时空部署位置浮动范围内,实地应急模拟过程中,无人机能够持续为地面监测人员提供有效通信保障,表明该算法应用于现实场景具有一定可行性。
4 结论与讨论
4.1 结论
本文通过在断网应急监测场景下调度应急通信车和通信无人机搭建地空通信网以保障不同时空分布监测任务点的数据传输。研究先结合高程、路网、任务点布局,利用空间分析方法对可视域、地形起伏度等指标加权评分,获取应急通信车最佳选址点,继而研发混合粒子群优化的递阶遗传算法以实现通信网动态部署。
经验证,本算法比普通递阶遗传算法、随机搜索等5种算法在提升适应度、突破局部最优、维持种群多样性、提高收敛速度方面具有优势。对于初次部署的小规模问题,本算法最优适应度2.21比其他算法平均最优适应度约高17%,适应度突破局部最优频次约为其他算法的2倍,运行时间94.23秒也略优于平均水平。多次运行下实验能在2分钟内稳定输出质量较优解,连续周期地覆盖全部监测任务点,可有效用于实际应急监测场景。
4.2 讨论
本算法性能受适应度评价指标、问题规模、迭代终止条件、算法参数等因素影响。为发挥算法实地应用效力,适应度评价指标权重配置应贴合应急监测场景需要,面对优化过程复杂的评价指标,可延长迭代次数以获得更优解。
当处理高维度未知变量问题时,算法受制于繁重的约束条件,导致程序循环解算成本显著增加,对所有监测任务点同时分配资源会造成任务压力和过度消耗,建议事先通过依监测时段分批调配通信资源等措施提高大规模通信网部署的运算效率。
未来研究方向:
- 改进算法用于大规模问题的收敛性能
- 优化通信评价指标仿真参数
- 完善通信无人机巡航、悬停、传输的任务执行全过程
- 探索多样化的天空地协同部署场景