研究方法
研究思路
如图1(a)所示,ATLAS原始探测信息主要包含光子发射时间和传输时间,即ATL02中/delta_time和/ph_tof字段。以数据段中第一个光子为起点,获取每一个光子的相对发射时间和相对传输时间,并结合光子传输速度c(约299 792 458 m/s)和卫星飞行速度v(约7.0 km/s)可以获得未经误差改正(硬件延迟、大气散射、折射和潮汐位移等)的相对传输距离和相对沿轨距离。
针对NASA采集的多波束激光雷达数据(Multiple Altimeter Beam Experimental Lidar, MABEL),相关学者对其研究分析证实了随机返回的光子独立且遵循泊松分布。在此理论基础上,NASA设计了基于泊松理论的云检测大气直方图算法、距离窗压缩和ATL03置信度分级算法。
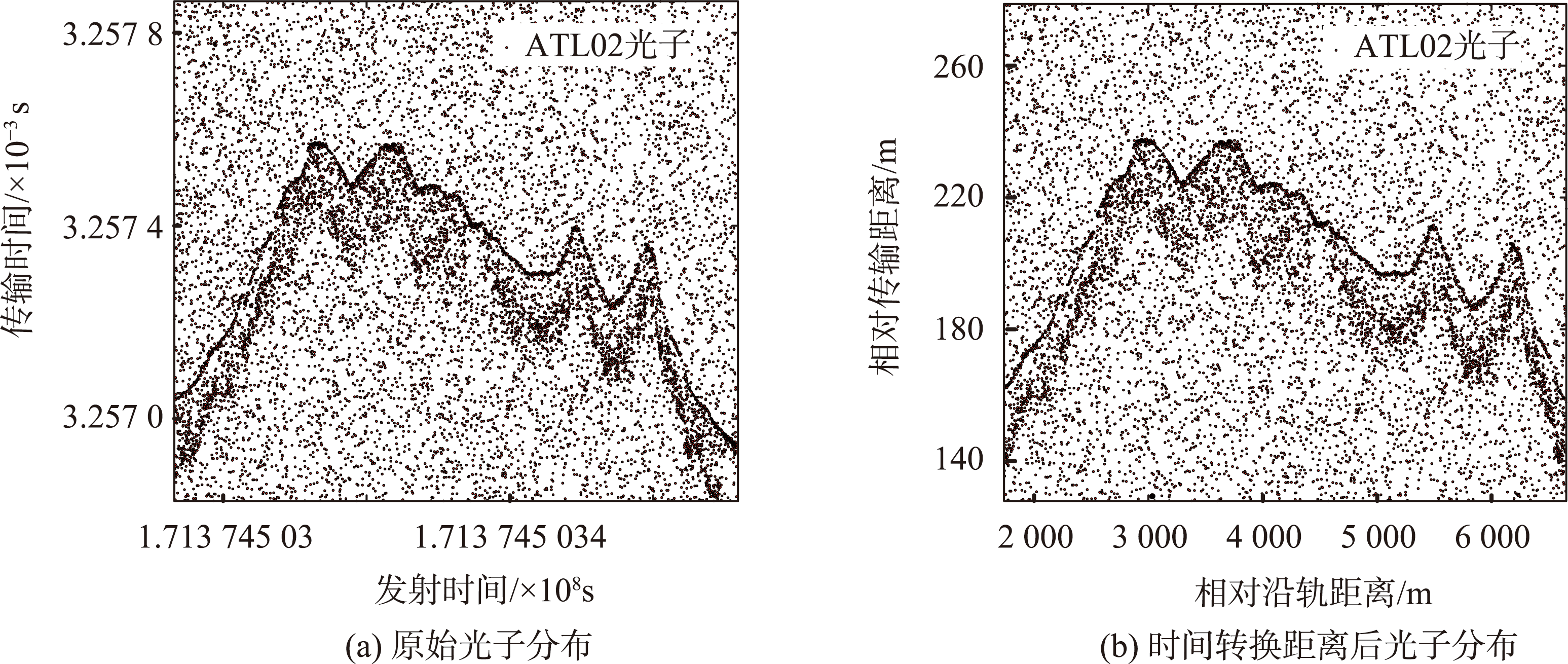
图1 基于ATL02光子传输时间的距离转换前后光子点云分布比较
泊松去噪算法
垂直直方图化
ICESat-2上搭载的ATLAS探测器探测频率为50 Hz,即以0.02 s(200次脉冲)间隔对光子回波数据进行记录,除此之外,硬件所能探测的最小脉冲宽度约为20 ns,转换为距离约为3 m。直方图划分时,水平方向以tmin=0.02 s为间隔和垂直方向以zmin=3 m为间隔初始化直方图箱大小,并对光子点云数据直方图化。
式中:X是被ATLAS时间标记的光子事件;P是光子事件X发生k次的概率;!是阶乘;
自然对数函数的底数;参数λ为单位时间内光子事件X平均发生的次数,即在0.02 s内3 m高的直方图箱中的光子数。
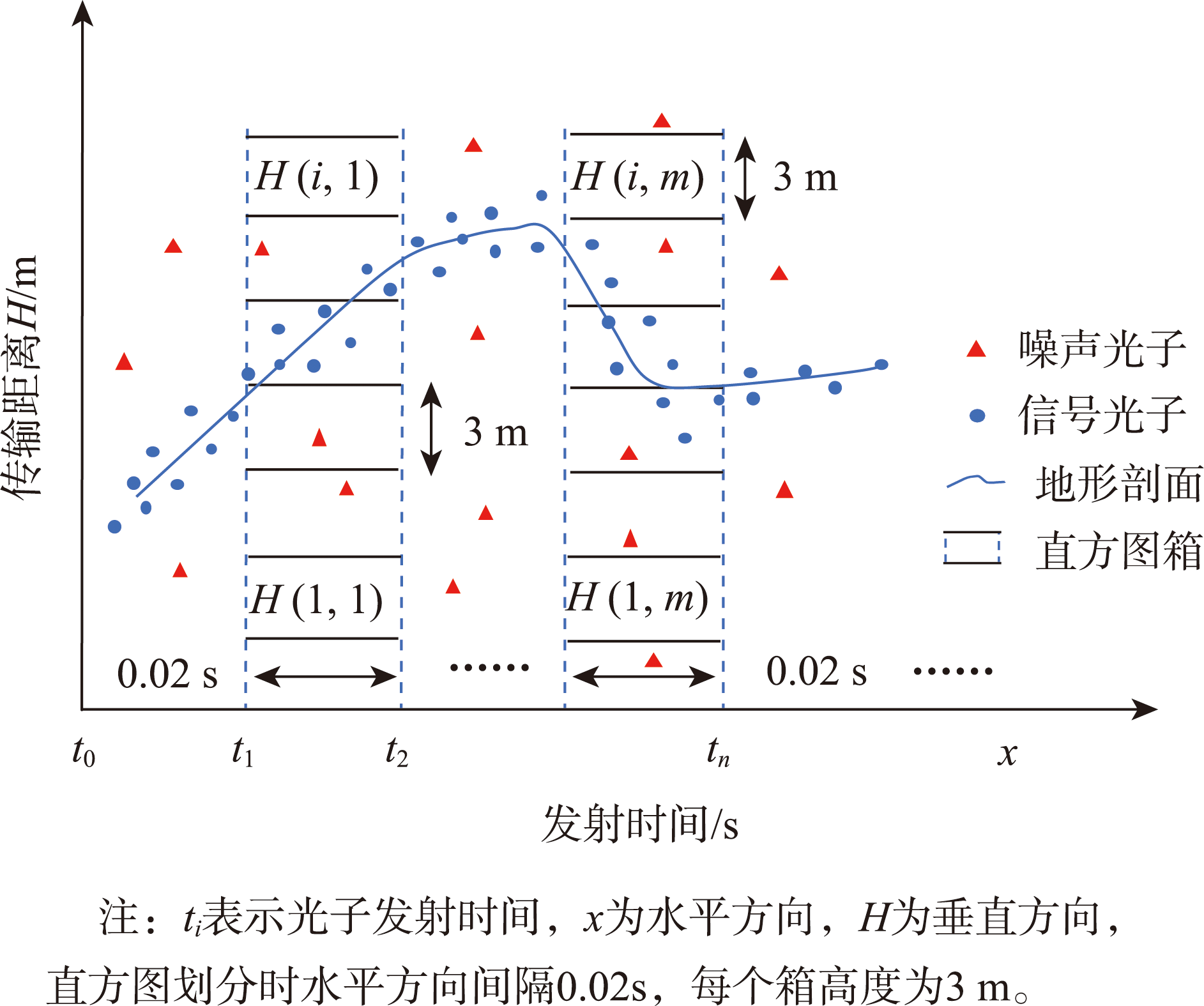
图2 光子点云垂直直方图化
背景箱与信号箱识别
根据泊松分布的特性,将光子数低于阈值的点视为噪声点。计算背景噪声阈值α以确定包含背景噪声光子的直方图箱(背景箱):
式中:ea=2.5是经验阈值,其作用是提高找寻背景箱的概率。当H(i, m)<α(m)时,将直方图箱H(i, m)标记为背景箱Hbg(i, m)。
确定信号阈值φ和信噪比Snr,以此找寻直方图中的信号箱:
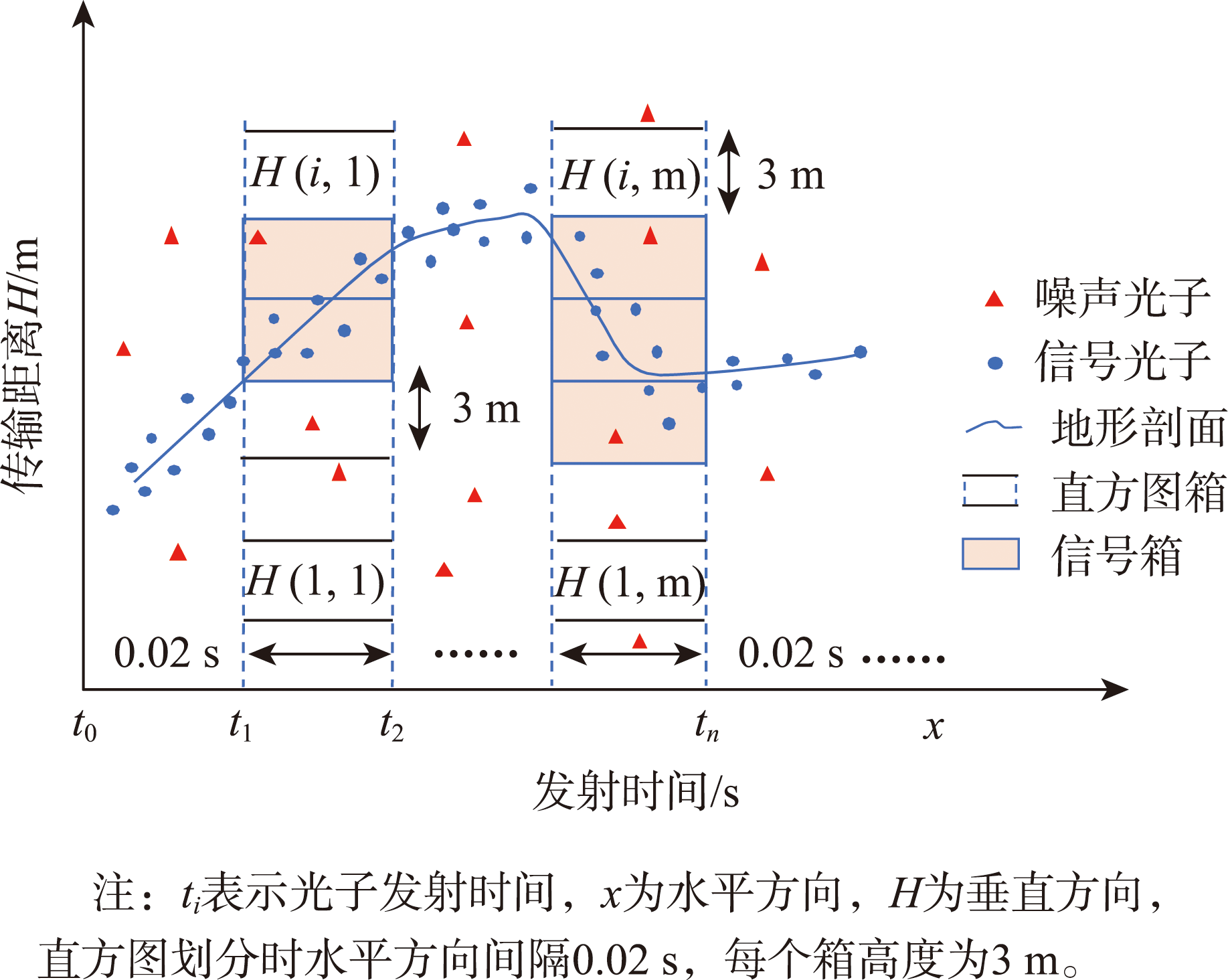
图3 基于直方图算法的信号箱识别结果
置信度标签分配
计算信号箱的信噪比SNR,并根据下式为满足SNR的箱中的每个光子分配低、中、高置信度参数来表征光子作为信号的可信度:
2 SNR(m)<20
3 20≤SNR(m)<50
4 50≤SNR(m) ⎫
式中:phconf是光子置信度标签,数值越大,光子作为信号的可信度越高。
为了防止单个直方图中信号光子识别不全而导致信号光子丢失,根据信号光子相对离散程度R确定信号探测概率阈值rlimit,以此作为查寻率r的约束:
当R≥10-3时,结合ATLAS系统对目标探测概率确定rlimit取值为0.2,反之取值为0.1。
倾斜直方图化
为了保证在陡峭地形条件下信号光子不遗漏,需相邻直方图间沿轨方向时间重叠率在50%以上。拟合坡度,对原始光子点云倾斜处理,将光子传输距离投影到沿坡面垂直的方向形成倾斜直方图,进行二次信号光子识别且合并置信度标签。
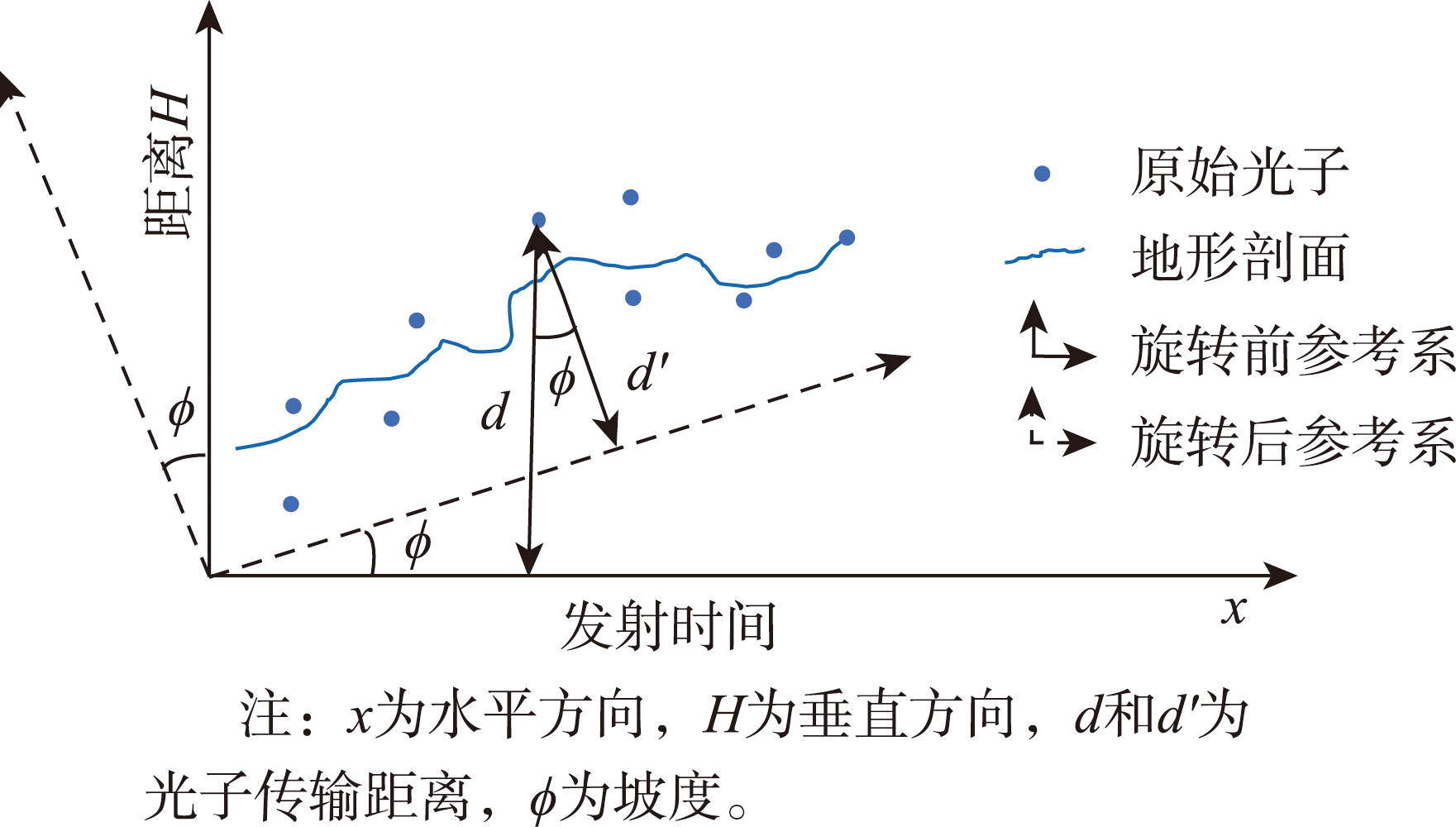
图4 倾斜直方图化过程中原始光子传输距离倾斜示意图