研究方法
1. 数据预处理
通过点云栅格化滤除地面点并根据地物投影特征进行行道树初步提取。建立规则格网、地面点滤除、二维格网区域增长以及行道树初提取4个部分。
2. 分层动态区域增长
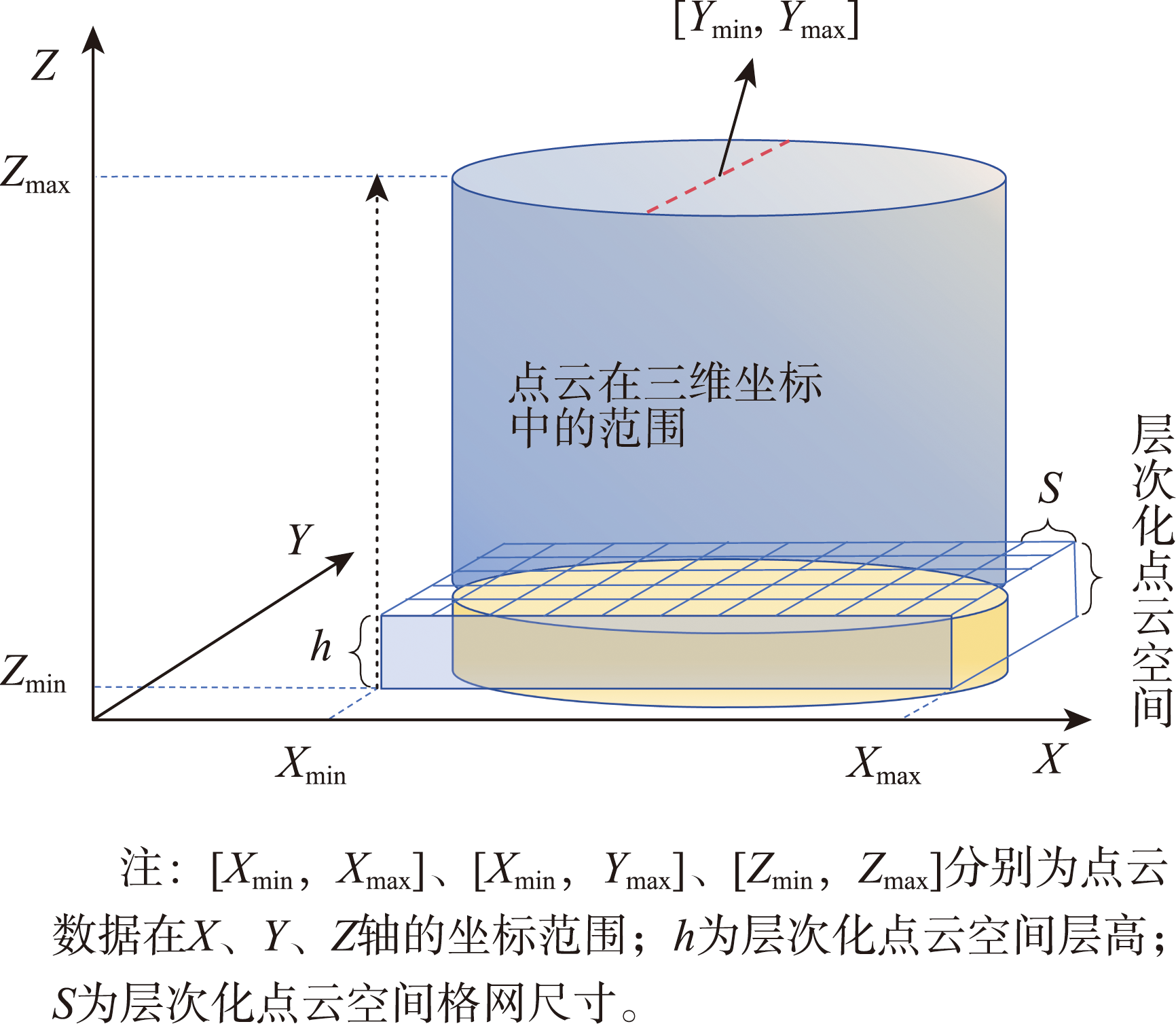
根据地物分布特征对点云数据进行等高度分层处理,构建层次化点云空间,进一步获取行道树与干扰地物信息。在层次化点云空间内部进行动态区域增长。
3. 行道树精细化提取
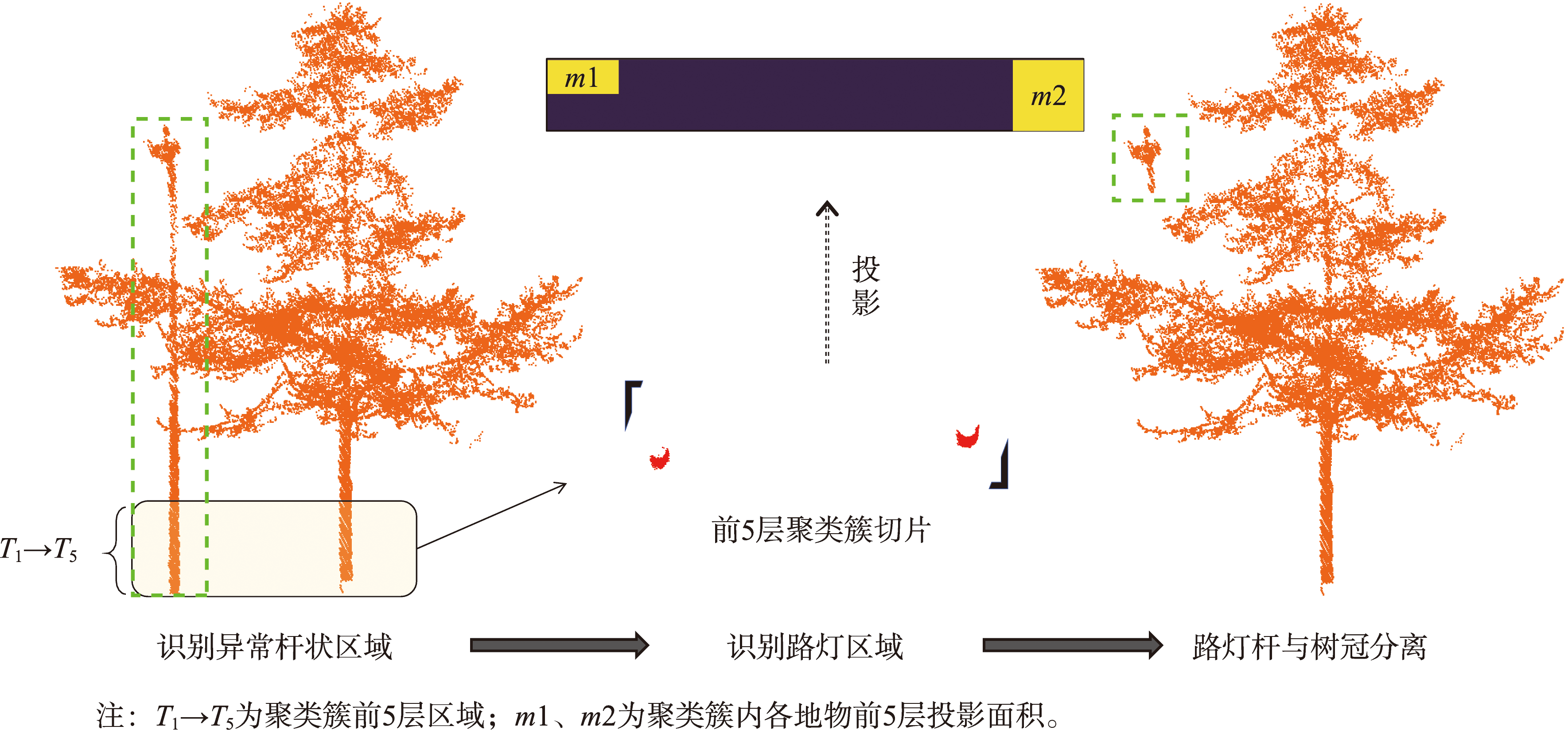
根据干扰地物的几何特征和行道树杆状特征,滤除干扰地物实现准确的行道树提取。利用地物几何特征及形态特征将与行道树相互遮掩或交叉的地物识别并滤除。
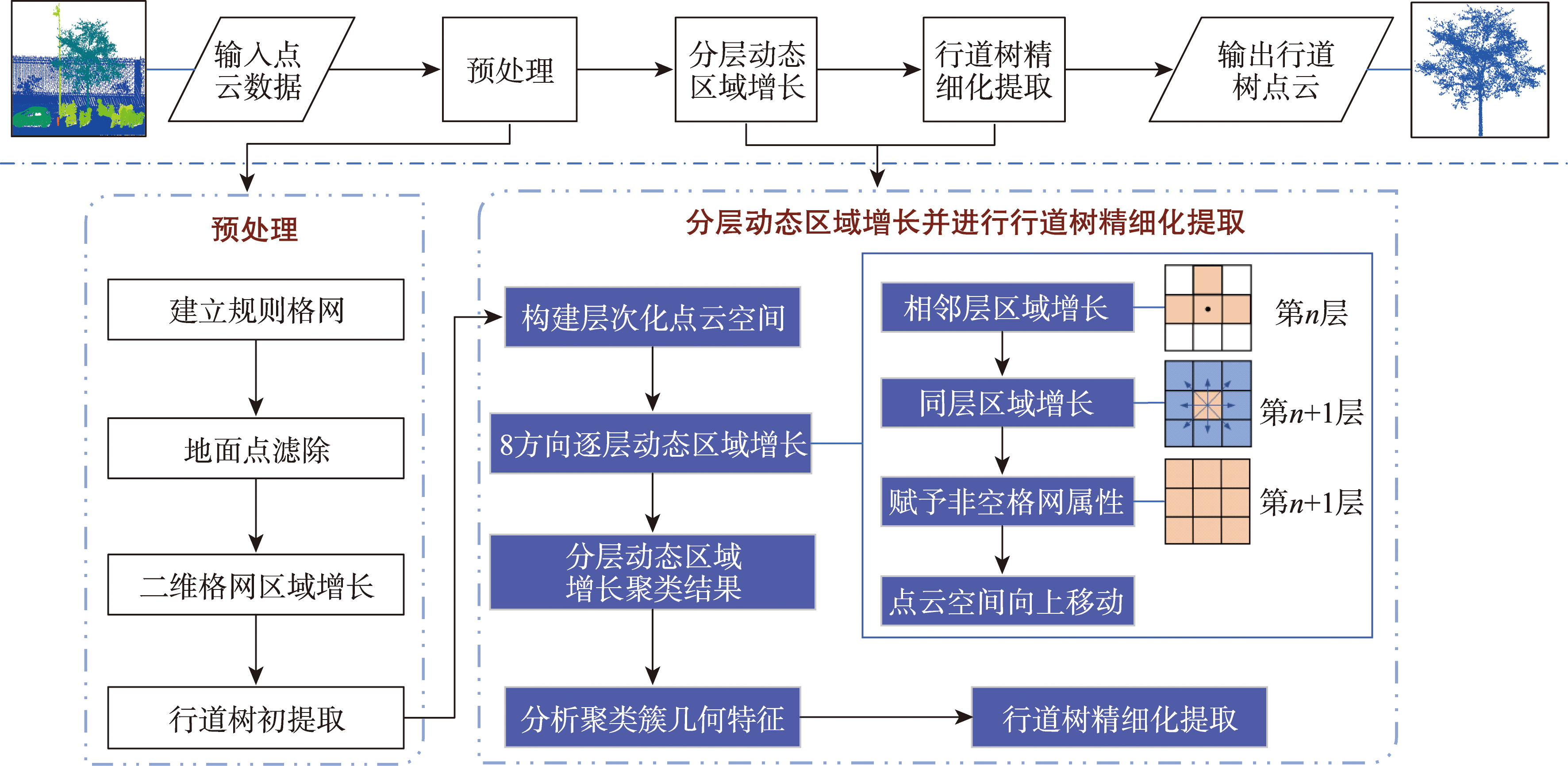
图1 顾及分层动态区域增长的车载LiDAR点云行道树提取方法流程