2. 本文方法
2.1 总体流程
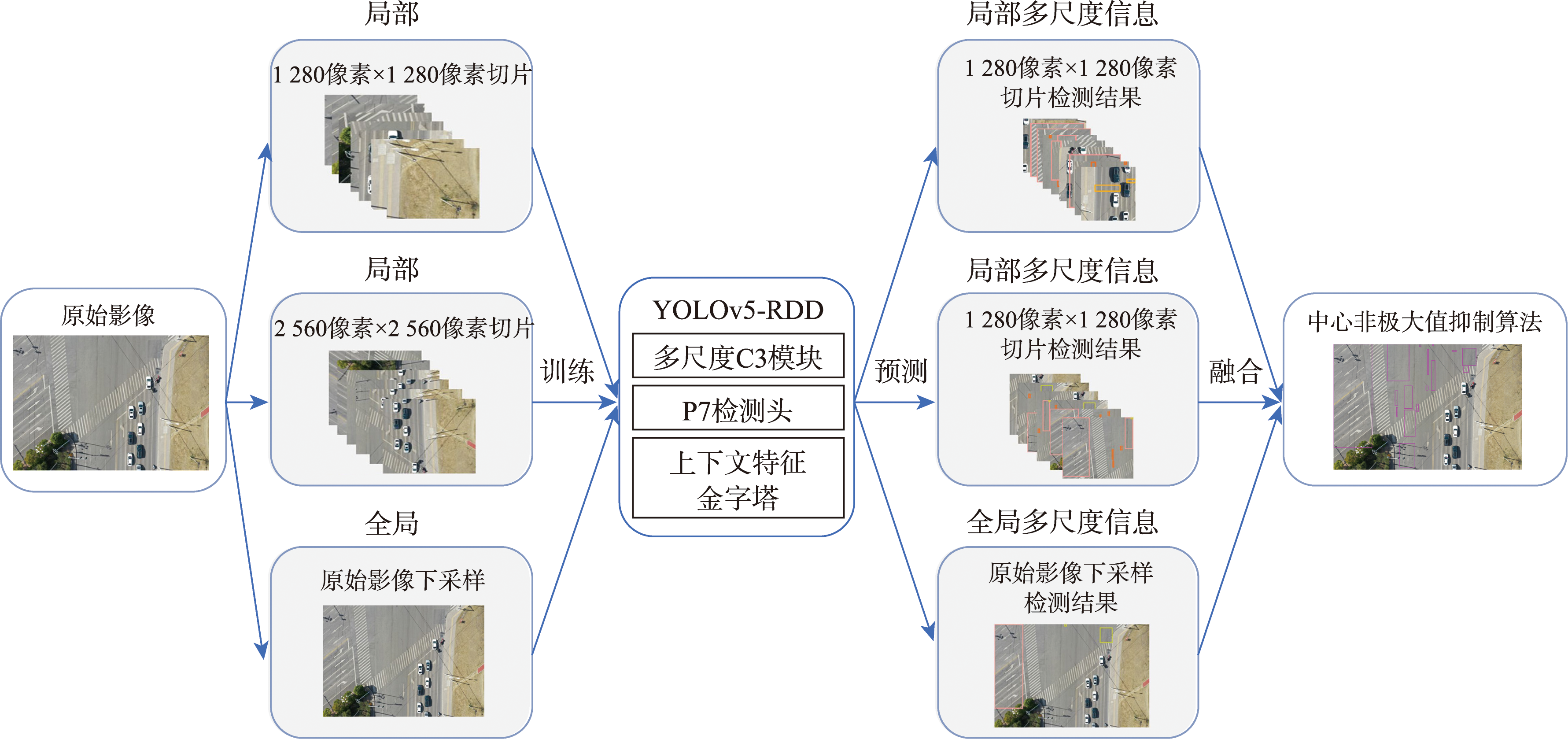
图1 方法流程
本文方法的总体流程如图1所示。输入原始无人机影像,首先,基于影像的全局下采样与局部切片方式获取多尺度训练样本;其次,将多尺度训练样本输入YOLOv5-RDD模型,对应生成多尺度预测结果,并进行预测结果的叠加融合;最后,基于中心非极大值抑制算法,消除叠加结果中的冗余检测框,进一步优化道路病害的检测结果。
2.2 YOLOv5-RDD
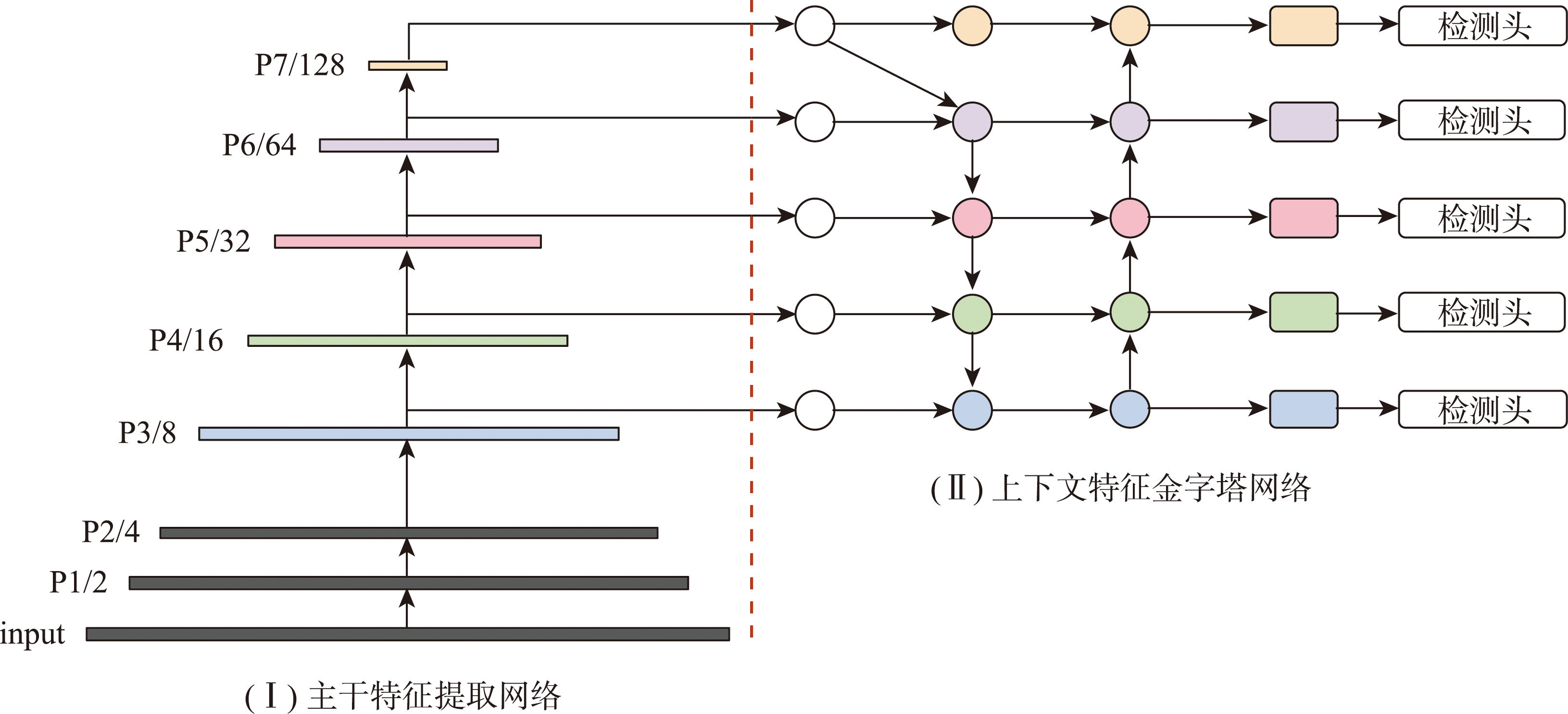
图2 YOLOv5-RDD模型结构
YOLOv5是目标检测领域较为常用的一种单阶段网络结构,能有效平衡检测效率与精度。本文在YOLOv5s6的基础上改进网络结构,形成YOLOv5-RDD模型。如图2所示,在原有YOLOv5s6网络的基础上,嵌入适用于大尺寸无人机影像道路病害检测任务的新模块,主要包括多尺度C3模块和上下文特征金字塔网络。此外,还引入了一个额外的预测层(P7),用来检测极大尺寸的目标。
2.2.1 多尺度C3模块
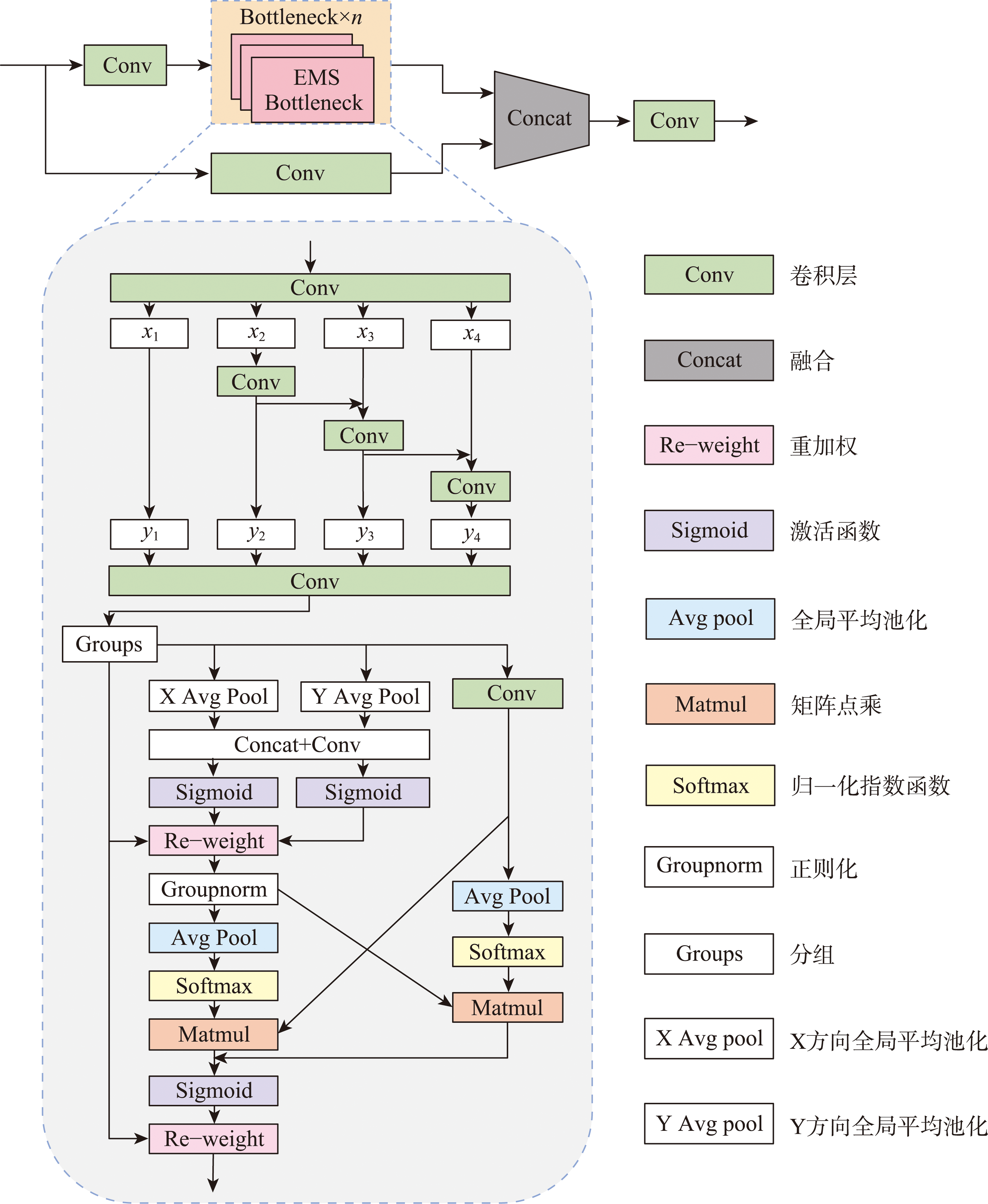
图3 MSC3结构
在无人机影像中,不同道路病害目标之间的尺寸差异明显,而YOLOv5主干网络的多尺度特征提取能力不足,无法有效提取多尺度特征。受Res2Net和高效多尺度注意力机制的启发,本文设计了一个多尺度C3模块(Multiscale C3,MSC3),用于提取多尺度特征。
2.2.2 上下文特征金字塔网络
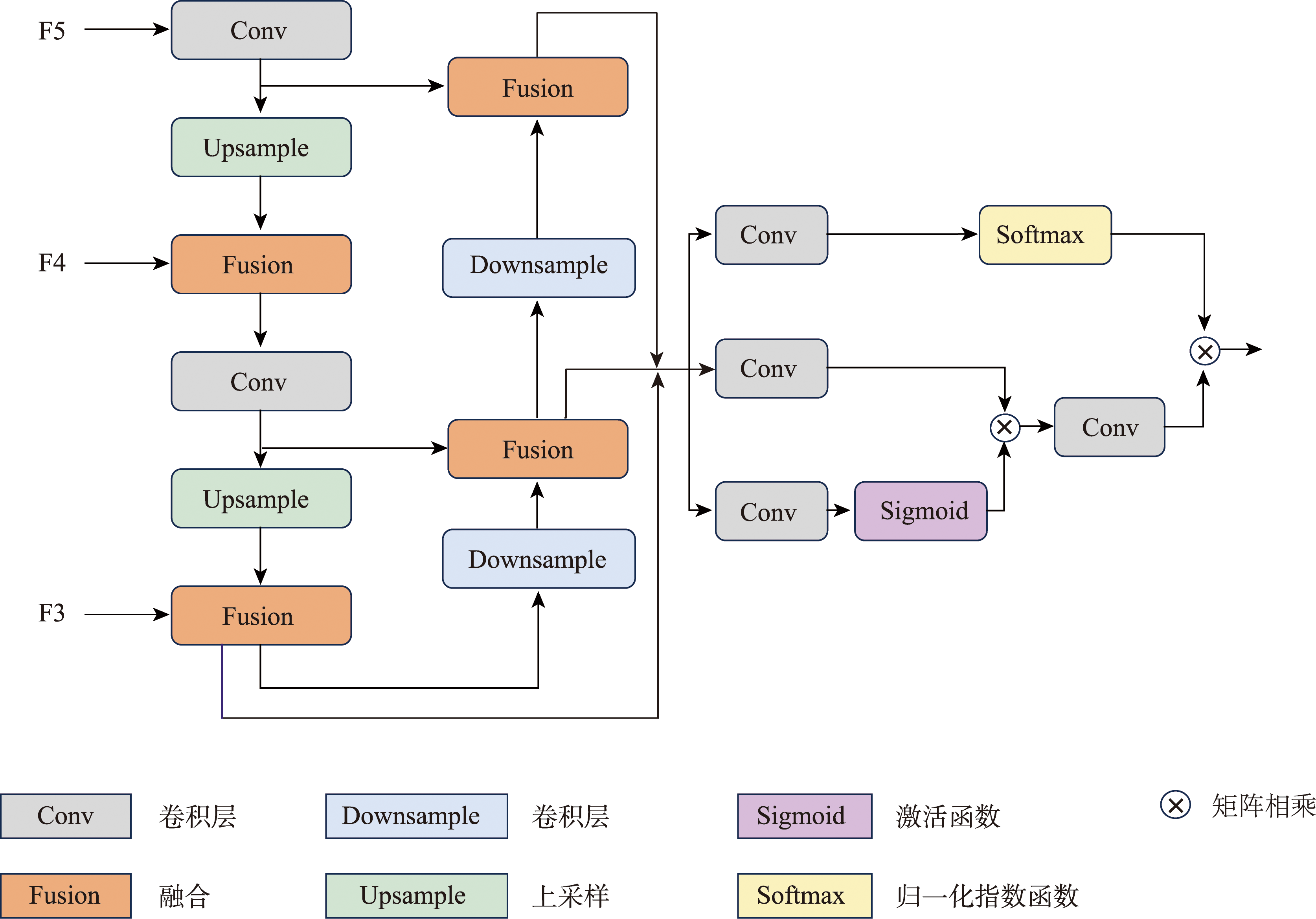
图4 CFPN结构
道路病害形状和大小各不相同,提高检测精度的有效方法是多尺度特征融合。YOLOv5使用路径聚合特征金字塔网络实现多尺度特征融合。然而,它只通过简单的自下而上地方式进行特征融合,多尺度特征融合能力不足。为提高YOLOv5的多尺度特征融合能力,本文设计了一种上下文特征金字塔网络(Context Feature Pyramid Network,CFPN)。
2.3 全局-局部多尺度融合策略
为辅助YOLOv5-RDD检测大尺寸无人机图像中的多尺度道路病害,提出了一种全局-局部多尺度融合策略。该策略通过切分方式捕获局部细节特征,同时采用下采样技术获取全局宏观信息,实现了不同尺寸目标的精准定位与识别。具体而言,该策略主要包括多尺度训练策略、多尺度预测策略和中心非极大值抑制算法3个关键步骤。
2.3.1 多尺度训练和预测策略
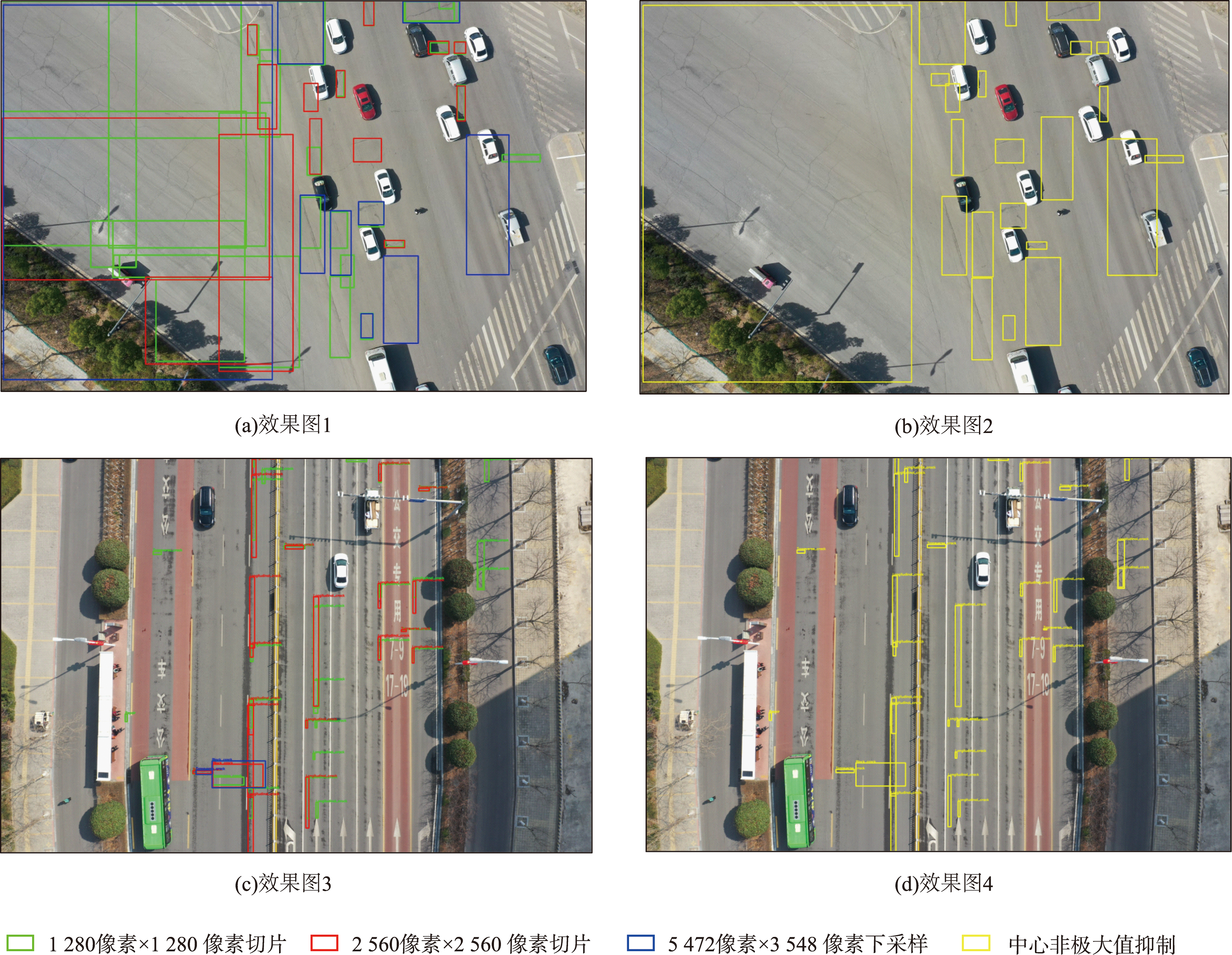
多尺度训练和预测策略是通过3种不同分辨率的影像块实现的,每种影像块都包含不同尺寸目标的细节:
- 小尺寸切分影像块(1 280像素×1 280像素):将大尺寸无人机影像按一定的重叠度切分成较小的影像块,这些影像块专为局部小尺寸的道路病害而设计。
- 大尺寸下采样影像块:将原始大尺寸无人机影像等比例下采样并填充到1 280像素×1 280像素,用来预测全局大尺寸目标。
- 中等尺寸切分影像块(2 560像素×2 560像素):将大尺寸无人机影像按一定比率切分并下采样到1 280像素×1 280像素大小,用来预测局部中等尺寸目标。
2.3.2 中心非极大值抑制算法
虽然叠加的全局-局部多尺度检测结果包含整张大尺寸无人机影像的道路病害信息,但也包括冗余目标检测框。为提高检测精度,本文基于非极大值抑制算法提出了一种中心非极大值抑制算法。
中心非极大值抑制算法使用多尺度评分(Multiscale Score, MS)作为排序依据,它同时考虑了检测框的面积和置信度分数。MS的计算公式如下:
式中:μ表示面积的权重;Score表示置信度分数;λ表示置信度分数的权重,它们的和为1;area表示所有检测框中任意一个检测框的面积;areamax表示所有检测框中面积最大的检测框的面积。