水印信息生成方法
2.1 Unicode编码方式与不可见字符的选择
Unicode编码是目前主流编码方式,本文采用占用空间更小、读写操作更快的UTF-8对水印信息进行编码。
在Unicode字符集中存在一些特殊字符用于格式控制,此类字符具有不可见、零宽度的特点。通过对Unicode字符集中存在的不可见字符进行严格的筛选与测试选取了6个不可见字符,这些字符嵌入至xodr文件中不会影响数据的正常使用。
| 符号名称 | Unicode编码 |
|---|---|
| Zero Width Space | U+200B |
| Zero Width Joiner | U+200D |
| Left-To-Right Mark | U+200E |
| Left-To-Right Embedding | U+202A |
| Pop Directional Formatting | U+202C |
| Left-To-Right Override | U+202D |
| 字符名称 | Unicode编码 |
|---|---|
| 比特字符0 | U+200B |
| 比特字符1 | U+200D |
| 空格字符Space | U+200E |
| 十进制字符 | Unicode编码 |
|---|---|
| 0 | U+200D U+200E |
| 1 | U+200D U+202A |
| 2 | U+202C U+202A |
2.2 海明码编码技术
海明码是通信领域中常见的纠错编码之一,使用较少的校验码来对多字节数据进行检测并可自动纠正为数据码,因其解码方程与编码方程的对应关系简单而被广泛应用于差错控制领域中。
海明码由数据码与校验码组成,其关系如式(1)所示:
N = d + p (1)
式中:N为海明码的位数;d为数据码的位数;p为校验码的位数
海明码应满足式(2)的关系:
2p - 1 ≥ e (2)
| 数据码位数/位 | 校验码位数 |
|---|---|
| 1 | 2 |
| 2~4 | 3 |
| 5~11 | 4 |
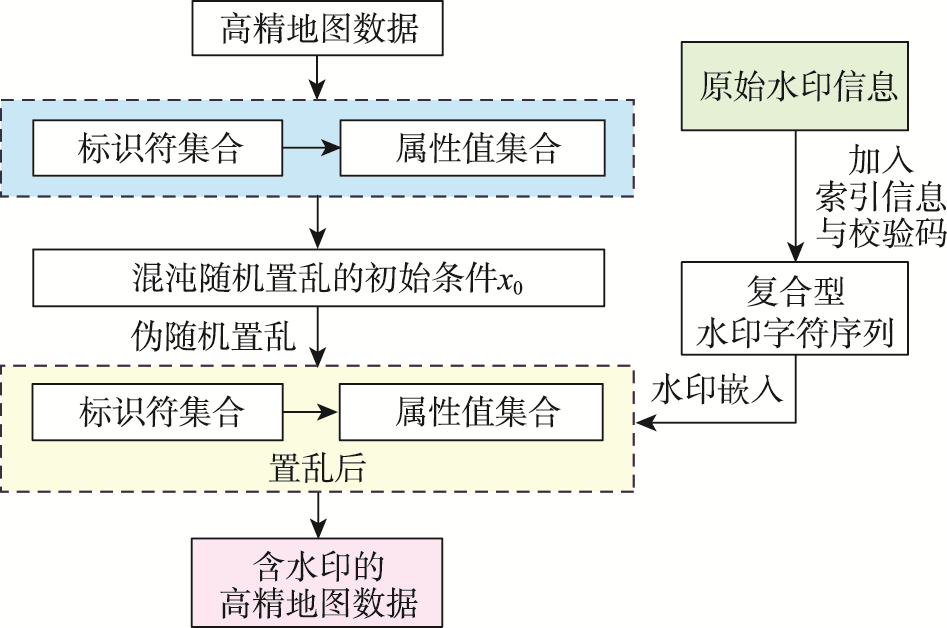
2.3 复合型水印字符序列生成
本文设计的复合型水印字符序列由水印信息、水印索引信息与海明码校验码三部分组成,最终用不可见字符进行表示。
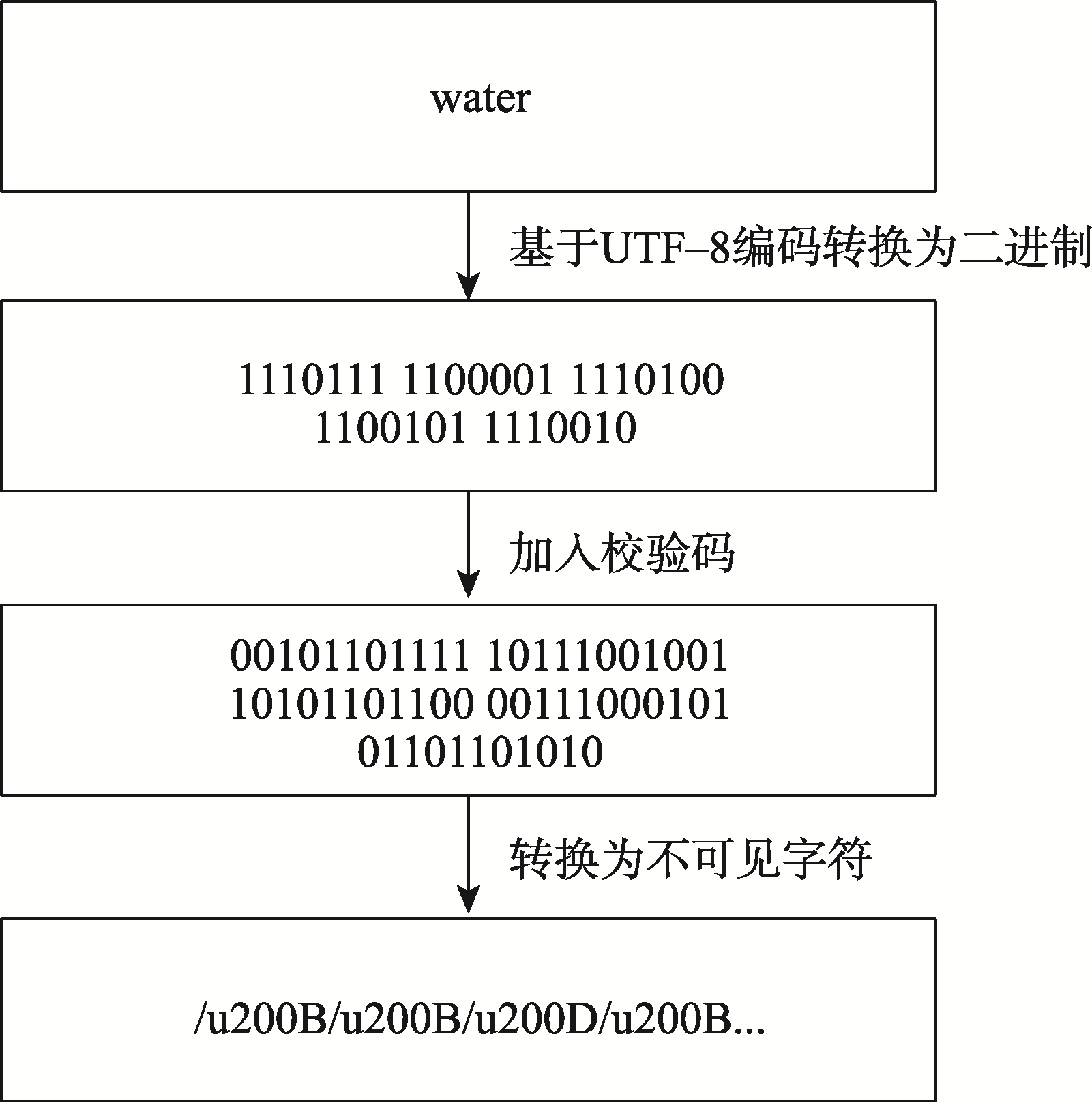
复合型水印字符序列构建的具体步骤如下:
- 将用户提供的标识性信息生成明文字符串S,并对该明文字符串进行UTF-8编码生成二进制水印信息字符序列W
- 以空格为分隔符将W分成K份二进制字符串序列,存储于集合WL中
- 遍历集合WL,对每份字符串进行海明码编码
- 设最终复合型水印字符序列为WM,由位置信息字符与水印信息字符组成