研究方法
本文方法分为数据预处理、视域空间构建和视距校正3个部分。在数据预处理阶段,分别基于地面测站和无人机点云模拟室内视点、表达三维环境,并通过机-地点云配准融合上述信息。在视域空间构建阶段,利用视点与周围点的空间关系计算视距,构建视域图像。在视距校正阶段,校正因点云空洞导致的视距错误。
方法流程
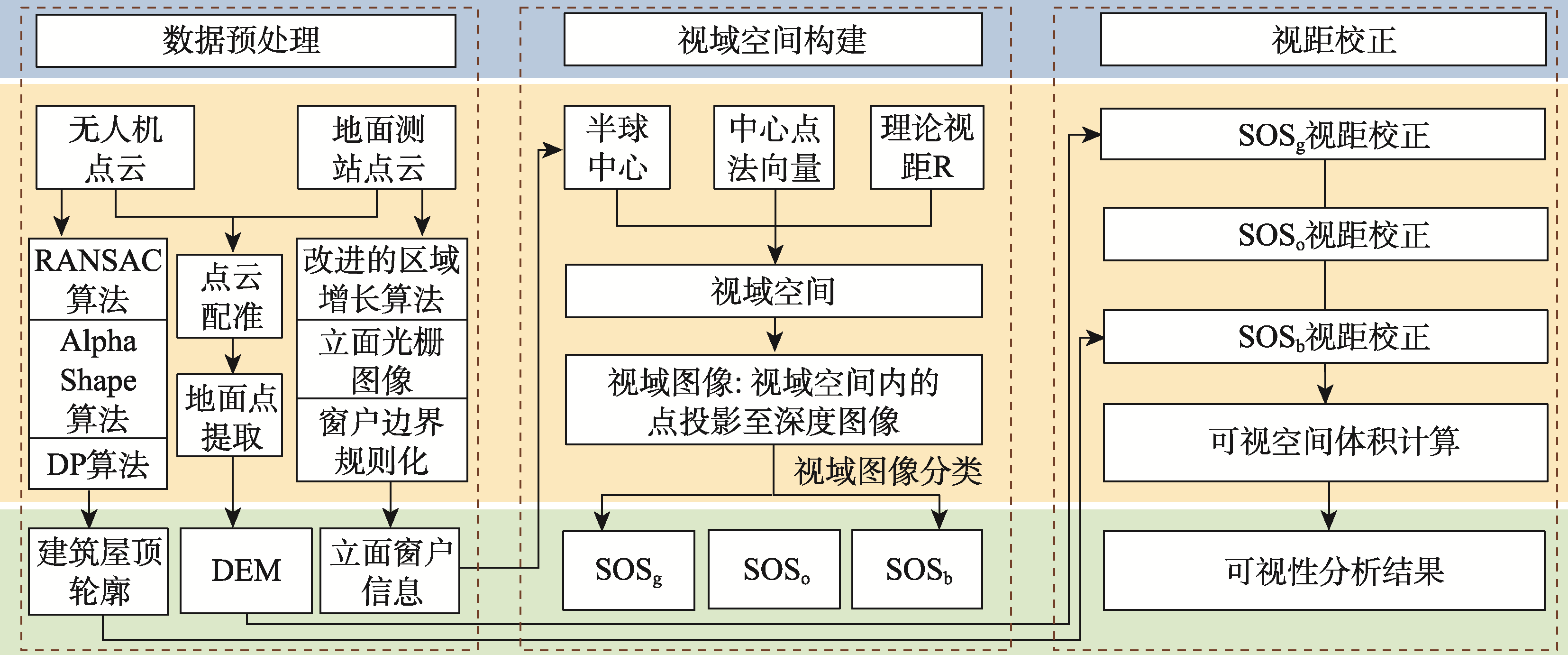
图1 三维可视性分析方法的流程
2.1 数据预处理
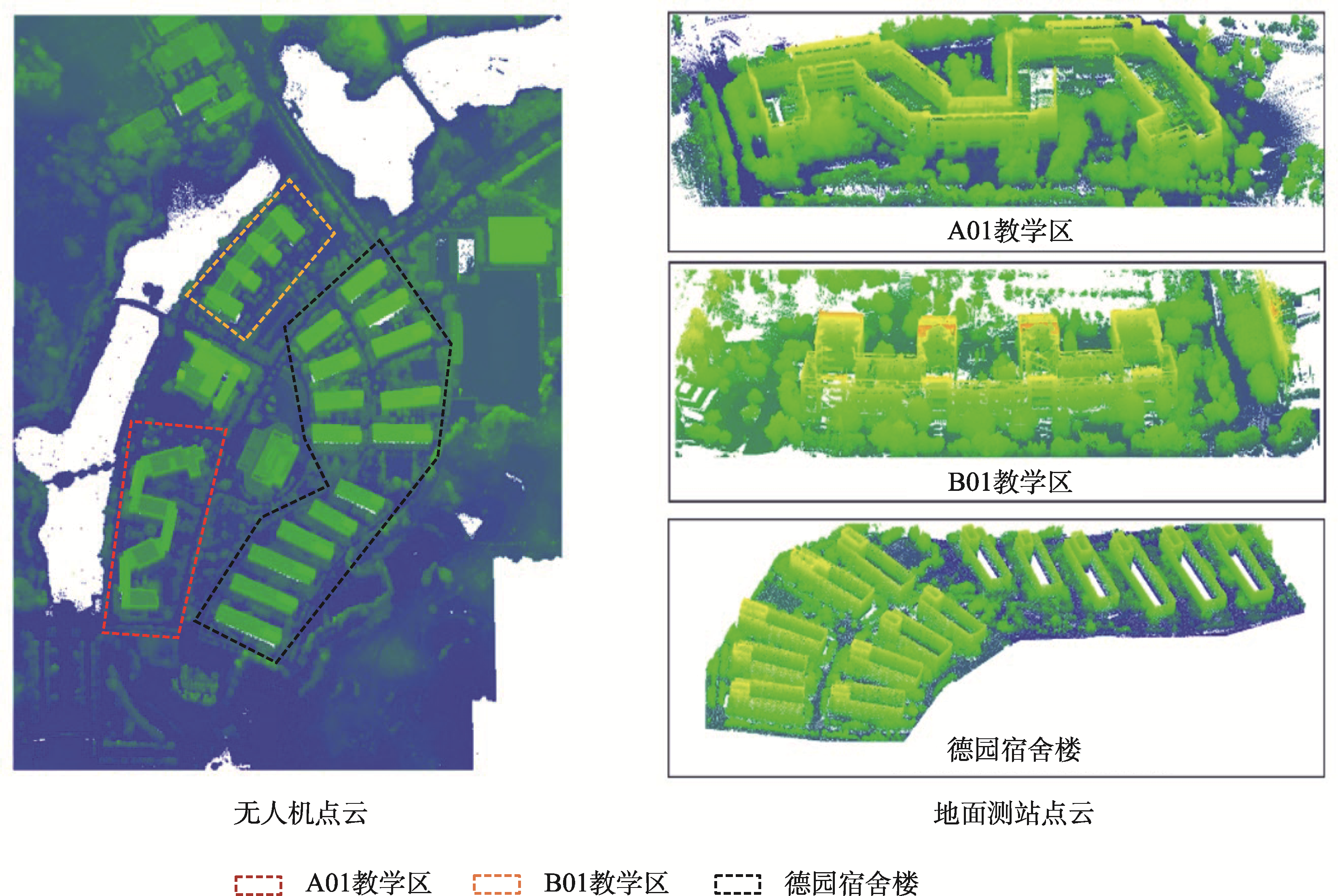
无人机点云具有丰富的顶面信息,地面测站点云则包含精确的立面信息。充分结合两者的优势,有助于提高可视性分析的准确性。本方法利用两种点云数据分别提取地物、地形信息,最后通过点云配准进行信息融合。
基于无人机点云提取建筑屋顶轮廓和DEM。首先,采用随机抽样一致(Random Sample Consensus,RANSAC)算法提取建筑物的屋顶表面。然后,采用Alpha shape算法提取建筑屋顶轮廓点。
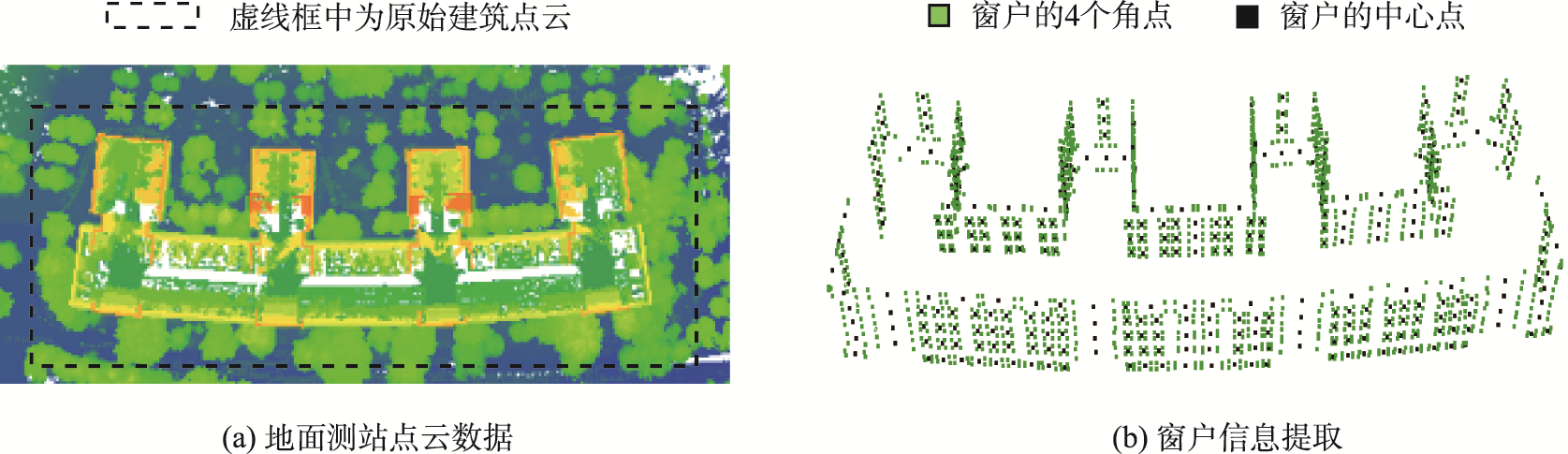
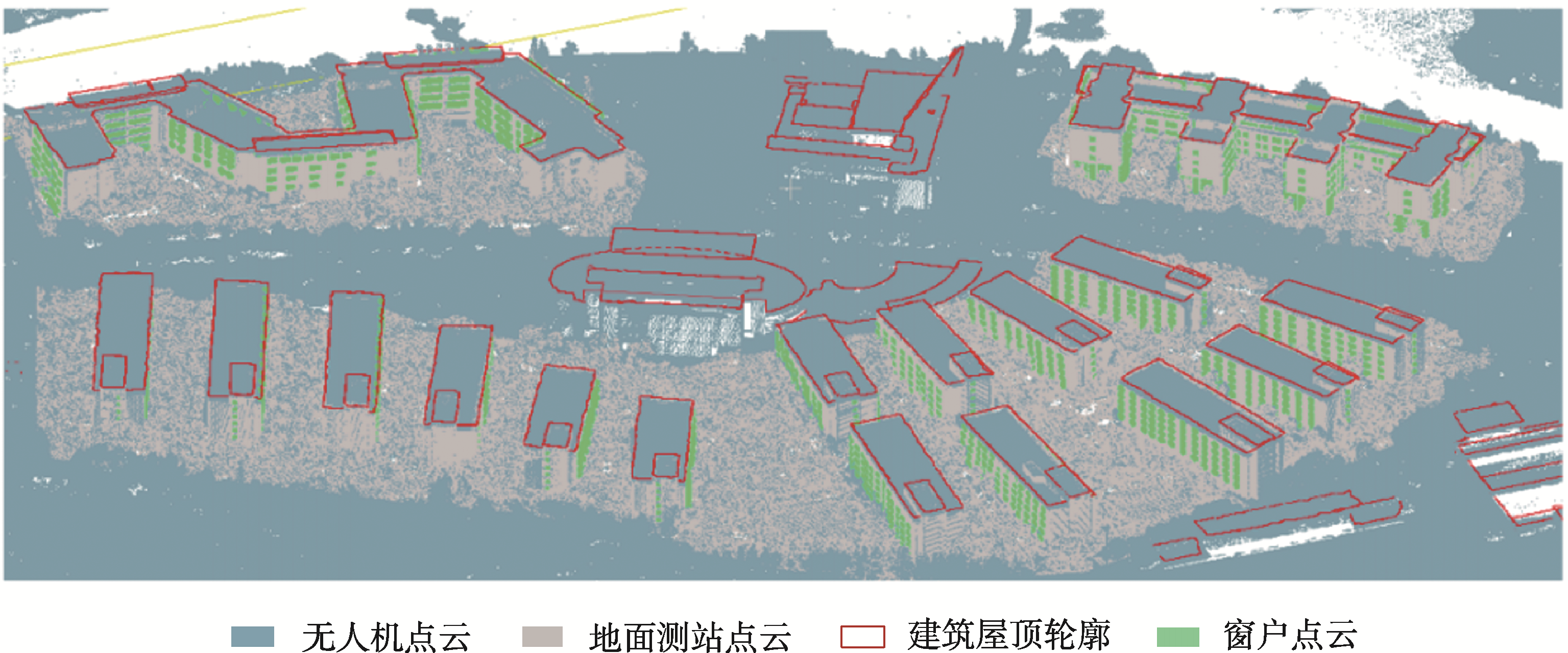
图2 提取窗户信息
基于地面测站点云提取立面窗户信息,通常包括3个关键步骤:建筑提取、平面分割和立面重建。
根据分割结果,利用立面栅格图像提取窗户信息。对于遮挡导致的缺失数据,利用规则化后保留的完整窗户信息及窗户间的相似性进行缺失窗户补全。
2.2 视域空间构建
为描述视点与可视地物的空间关系,以前文提取的室内视点为原点,窗户的法向量方向为y轴,z轴平行于原始坐标系,x轴垂直于y轴和z轴方向,建立局域坐标系,得到各点的极坐标(ρ,θ, φ)。
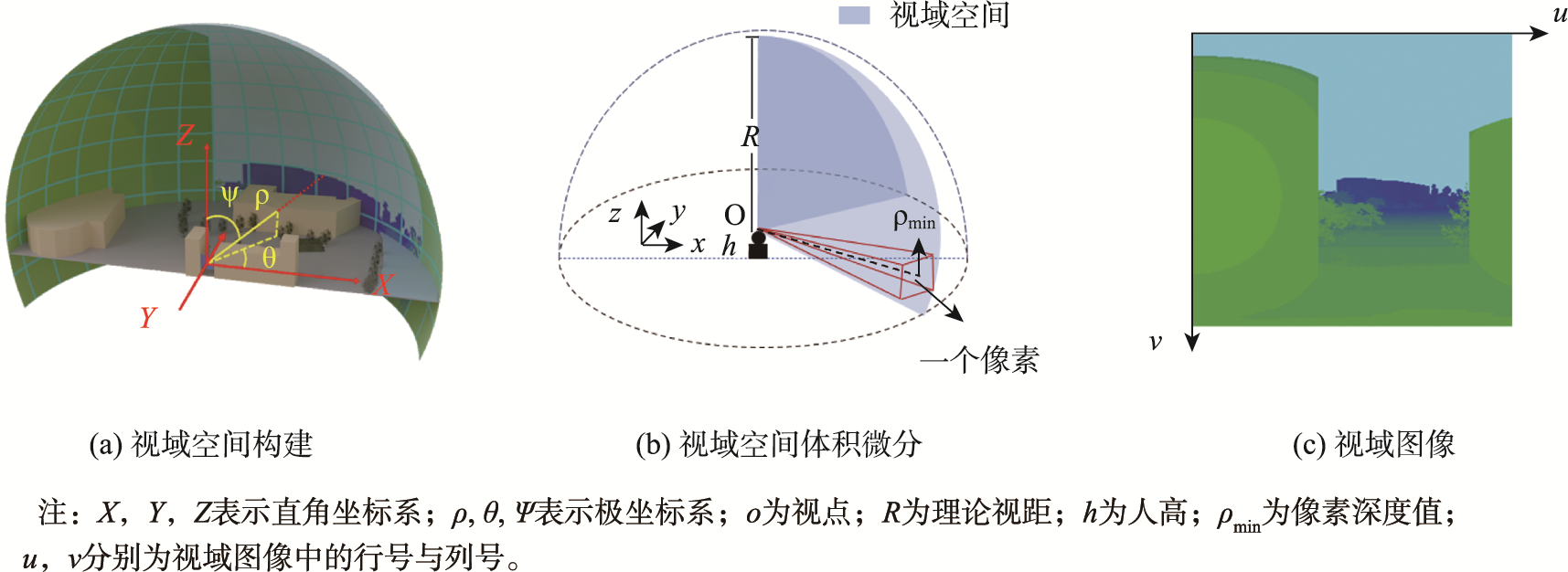
图3 视域空间与视域图像
通过将视域空间内的点云投影至深度图像,每个区间对应一个像素,形成视域图像。任意点P(ρ,θ, φ)的像素坐标(u,v)用式(1)计算:
u = ⎣(180-θ)/α⎦ v = ⎣φ/α⎦
式中:u,v分别为P点在视域图像中的行号与列号;θ, φ为P在视点局域坐标系下的极坐标;α为角分辨率。每个像素的深度值为对应区间内的点到原点的最近距离,即可视视距,表示为depth(u,v)。
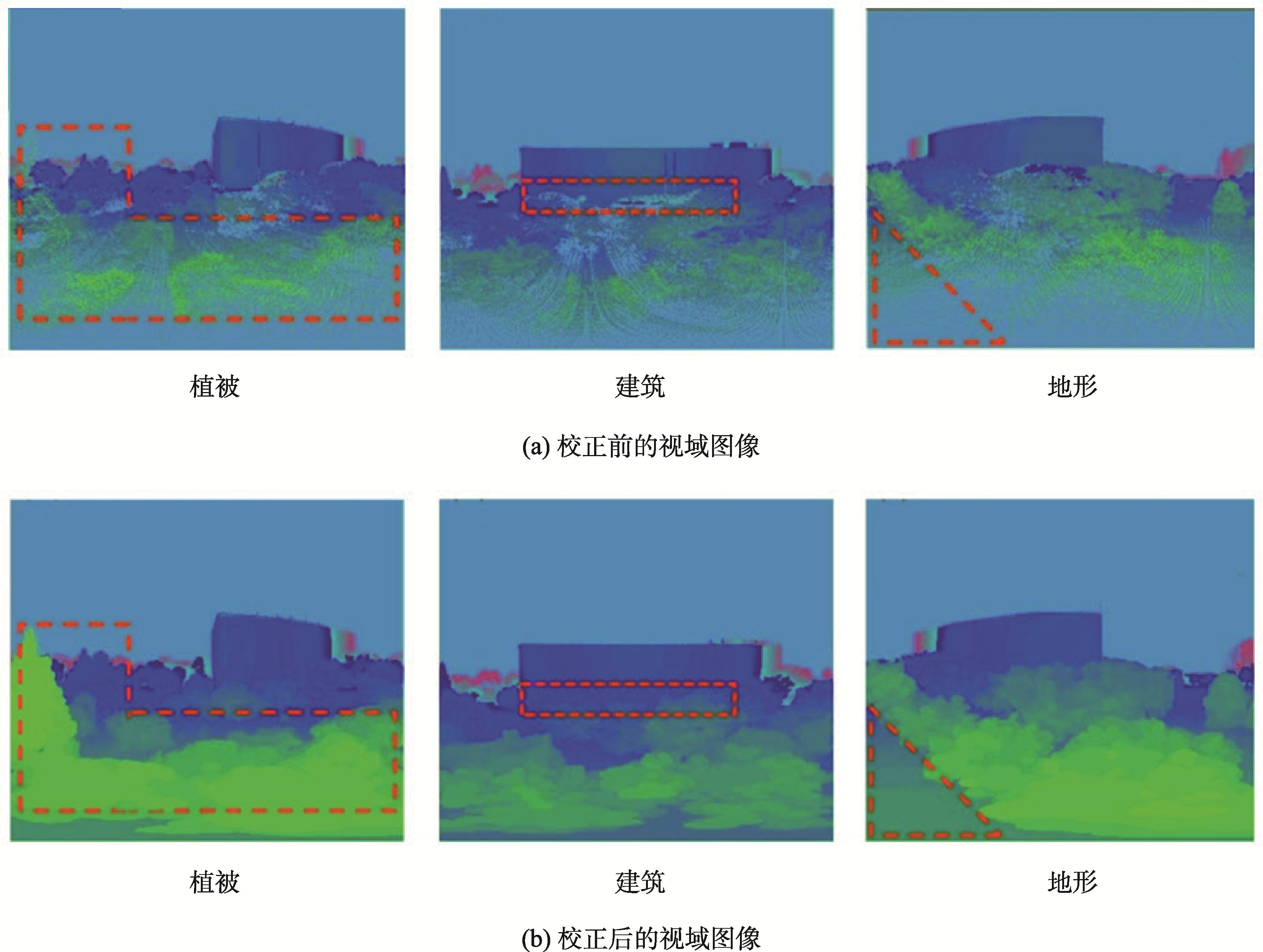
2.3 视距校正
可视空间的视距错误主要受到以下2个因素的影响:
- 数据采集过程中的前景遮挡会导致背景对象存在空洞现象
- 点云数据的离散性可能导致数据空洞
针对上述问题,本文引入视线区(Sector of Sight, SOS)的概念来离散视域空间。在视域图像中,每一列像素对应一个SOS,按照从上到下的顺序标记每个SOS内的像素,记作Vj,其中j∈[1,m] (m=180/α)。
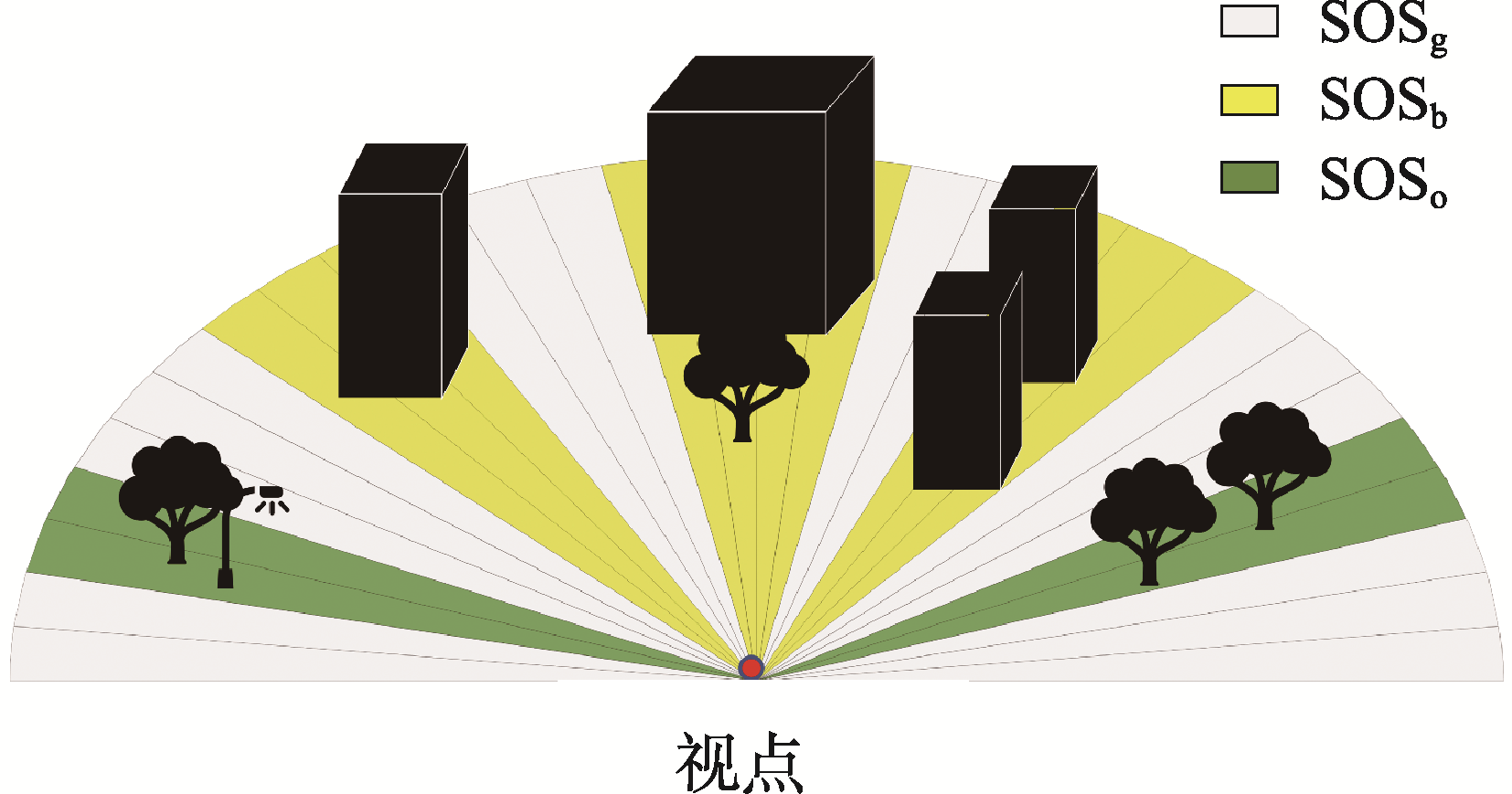
图4 SOS分类
根据包含的对象类型,对SOS进行分类和标记:
- SOSb (Sector of Sight Building): 包含建筑
- SOSg (Sector of Sight Ground): 仅包含地面
- SOSo (Sector of Sight Others): 其他类型
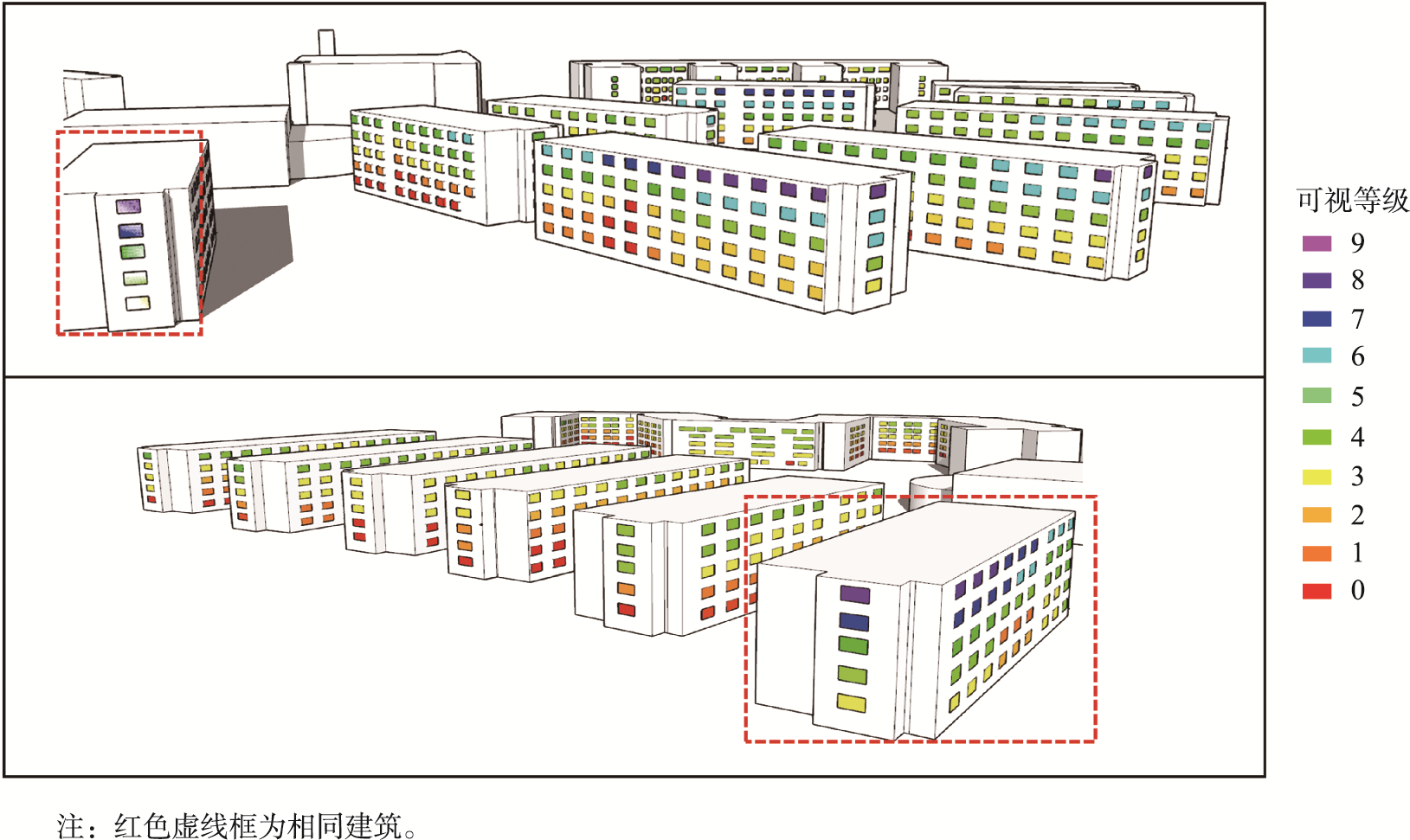
针对不同类别的SOS,本文提出具体的视距校正方法:
SOSg校正
将DEM视为地面高程真值,对于Vj,从视点出发以DEM分辨率为生长半径r1,向视距方向生长。
SOSo校正
基于点密度的方法进行视距校正。以视点为起点,沿视线方向逐渐扩大球形邻域半径直至r2。
SOSb校正
计算出视点与建筑物之间的视距作为基本校正结果,再根据地物之间的遮挡关系进行视距校正。