研究背景
LiDAR SLAM在弱光环境中具有优势,但在长廊、隧道等几何特征匮乏的退化环境中,传统LiDAR里程计基于ICP算法和特征配准算法的鲁棒性较差。
创新方法
提出基于激光强度性质和消元思想的强度修正方法,结合无监督位置修正优化原始点云;采用模糊综合评价算法构建检测模型,直接检测单帧点云退化情况。
技术优势
不依赖启发式阈值和间接处理,无需复杂网络结构和模型训练过程,同时兼顾检测效率和精度,具有低复杂度和显著二次开发优势。
方法流程
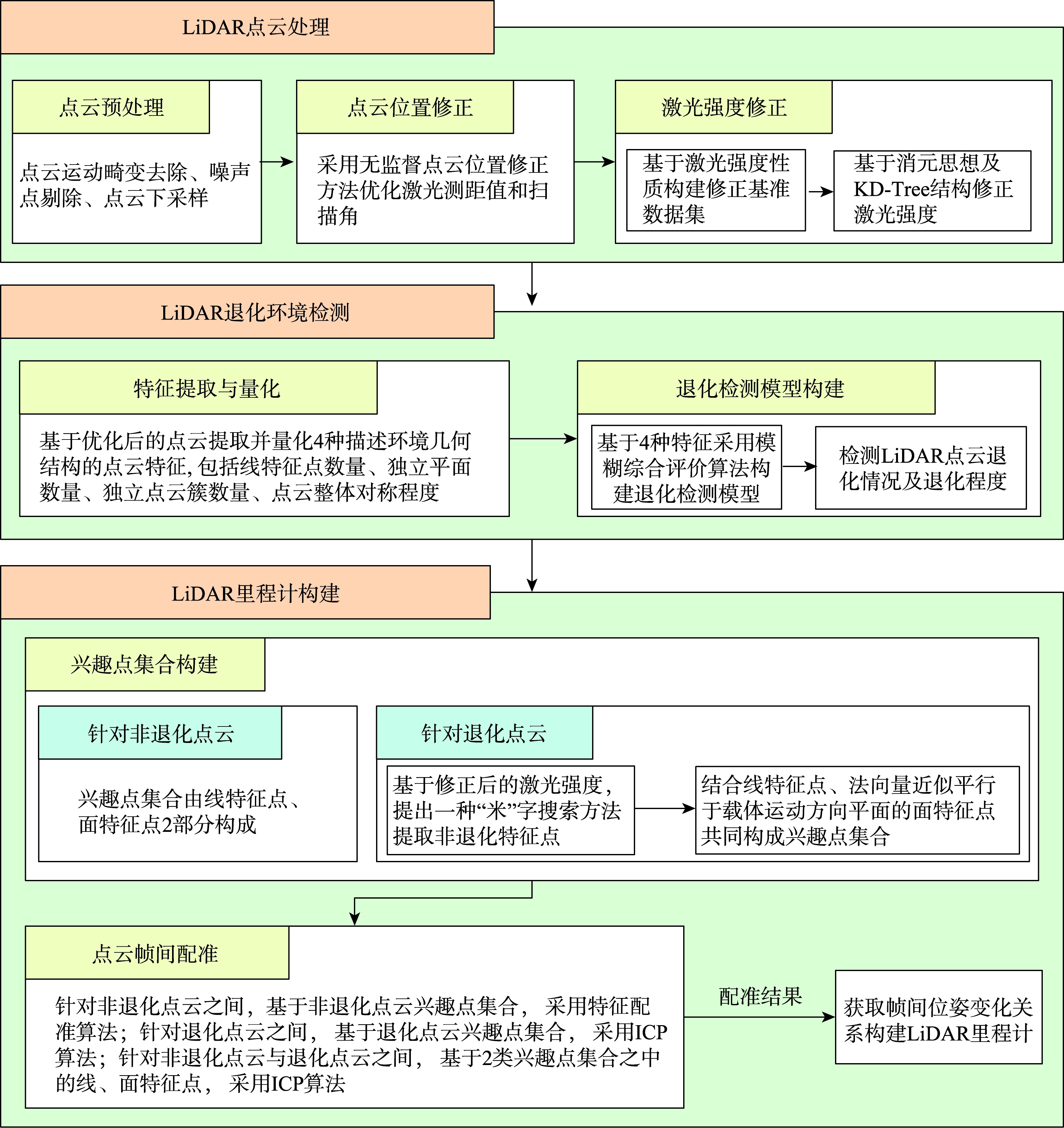
图1 面向退化环境的LiDAR里程计定位方法流程
LiDAR点云处理
- 采用V-ICP方法去除点云运动畸变
- 滤波方法降采样并剔除噪声点
- 无监督点云位置修正方法标定系统误差
- 基于激光强度性质和消元思想的强度修正
LiDAR退化环境检测
- 提取4种描述环境几何结构的点云特征
- 采用模糊综合评价算法构建检测模型
- 直接检测单帧点云退化情况及退化程度
- 避免启发式阈值和间接处理的影响
LiDAR里程计构建
- 针对不同退化情况设计兴趣点集合构建方案
- 非退化点云使用特征配准算法
- 退化点云使用"米字搜索"方法提取非退化特征
- 结合ICP算法处理帧间兴趣点集合
关键技术
1. 激光强度修正方法
激光接收功率PR和发射功率PE之间的关系:
式中:L表示激光测距值;θ表示激光入射角;ρ表示被击中物体的反射系数;ηatm表示环境参数;ηsys表示LiDAR系统参数;DR表示激光接收孔直径。
激光强度Intensity的量化表达式:
通过计算激光强度比值将几何因素t(L,θ)消元,对同类点云的激光强度赋予相同值,实现激光强度修正。
2. "米字搜索"方法
将平面所在空间按照延伸主方向划分为n个区间段,Z轴方向划分为m个区间段,形成n×m个三维小体素。计算每个小体素内激光强度均值,获得二维栅格图像。
按照延伸主方向及45°、90°、135°夹角方向进行搜索,筛选非退化特征:
- 将每行首个栅格的激光强度作为搜索基准
- 后续栅格与基准差异满足阈值则持续延伸
- 超过阈值则停止延伸,记录延伸栅格数量
- 匹配历史激光强度数组判断退化特征
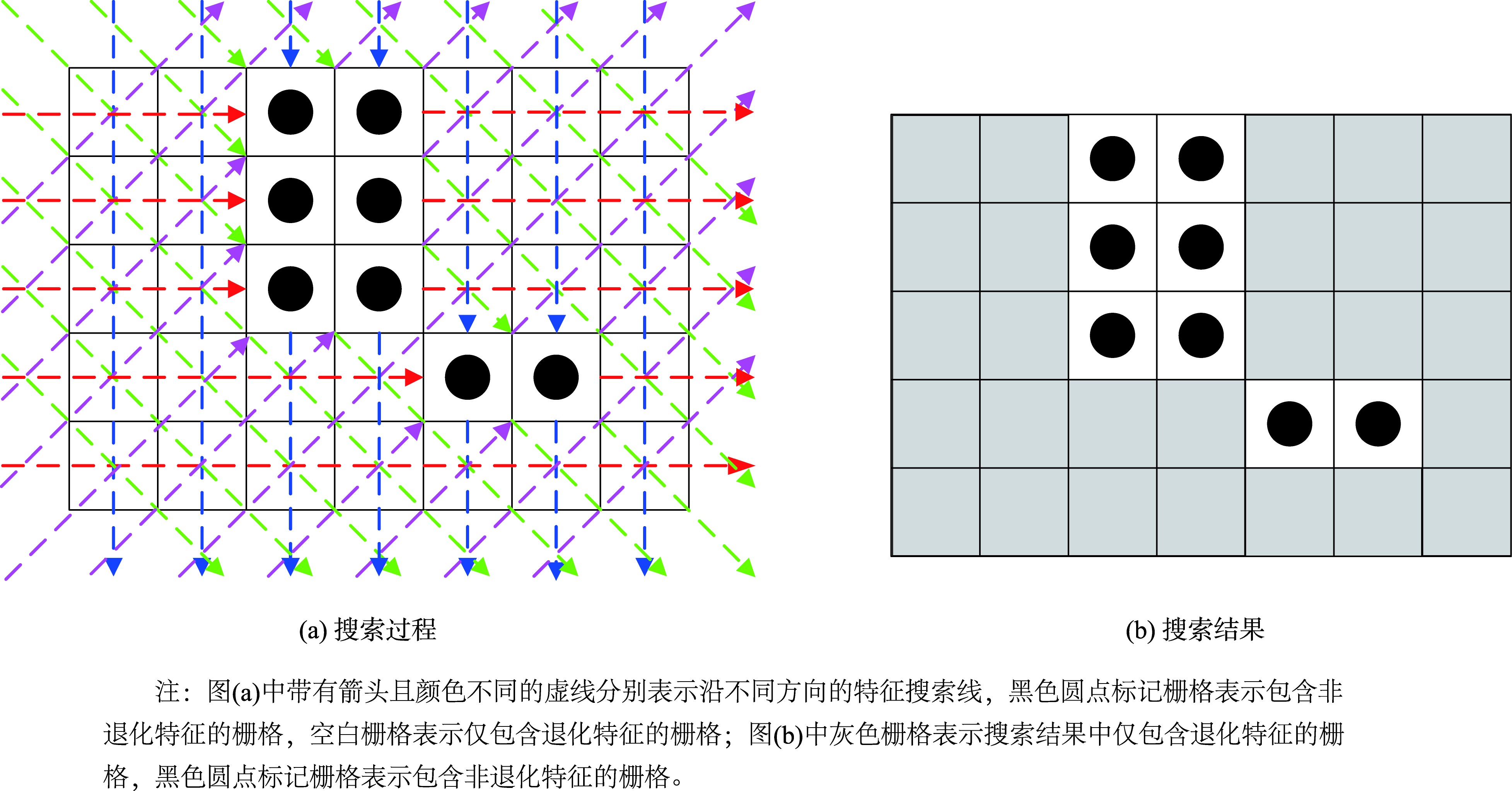
图2 "米字搜索"示意图
3. 模糊综合评价算法
构建因素集U、评价集V和模糊评价矩阵R:
V = [v1 v2 v3]
R = [μ(ui,vj)]4×3
采用层次分析法计算权阵D,通过乘积求和方法计算模糊评价结果集B,根据最大隶属度原则判断点云退化情况。
半梯形隶属度计算方法示例(整体对称程度P):
0 (Pi < η1)
[1-(Pi-MP+σP)/2σP
其中η1=MP-σP,η2=MP+σP,MP为均值,σP为标准差。
实验结果
1. 激光强度修正效果
| 评价对象 | 墙面 | 地砖 | 纸板 | 木板 | 铁皮箱 | 人 | 均值 |
|---|---|---|---|---|---|---|---|
| 修正正确率/% | 91.41 | 97.04 | 94.20 | 90.14 | 90.43 | 49.33 | 89.40 |
实验结果表明,本文方法对墙面、地砖等静态物体的激光强度修正效果良好,但对动态人体目标的修正效果较差,因人体几何结构不规则导致法向量拟合误差较大。
2. 退化检测效果对比
| 方法 | 退化点云正确检测率/% | 非退化点云错误检测率/% | 检测效率/s |
|---|---|---|---|
| 对比方法1 | 92.20 | 26.28 | 0.0143 |
| 对比方法2 | 97.02 | 6.62 | 0.0075 |
| 本文方法 | 98.58 | 2.24 | 0.0104 |
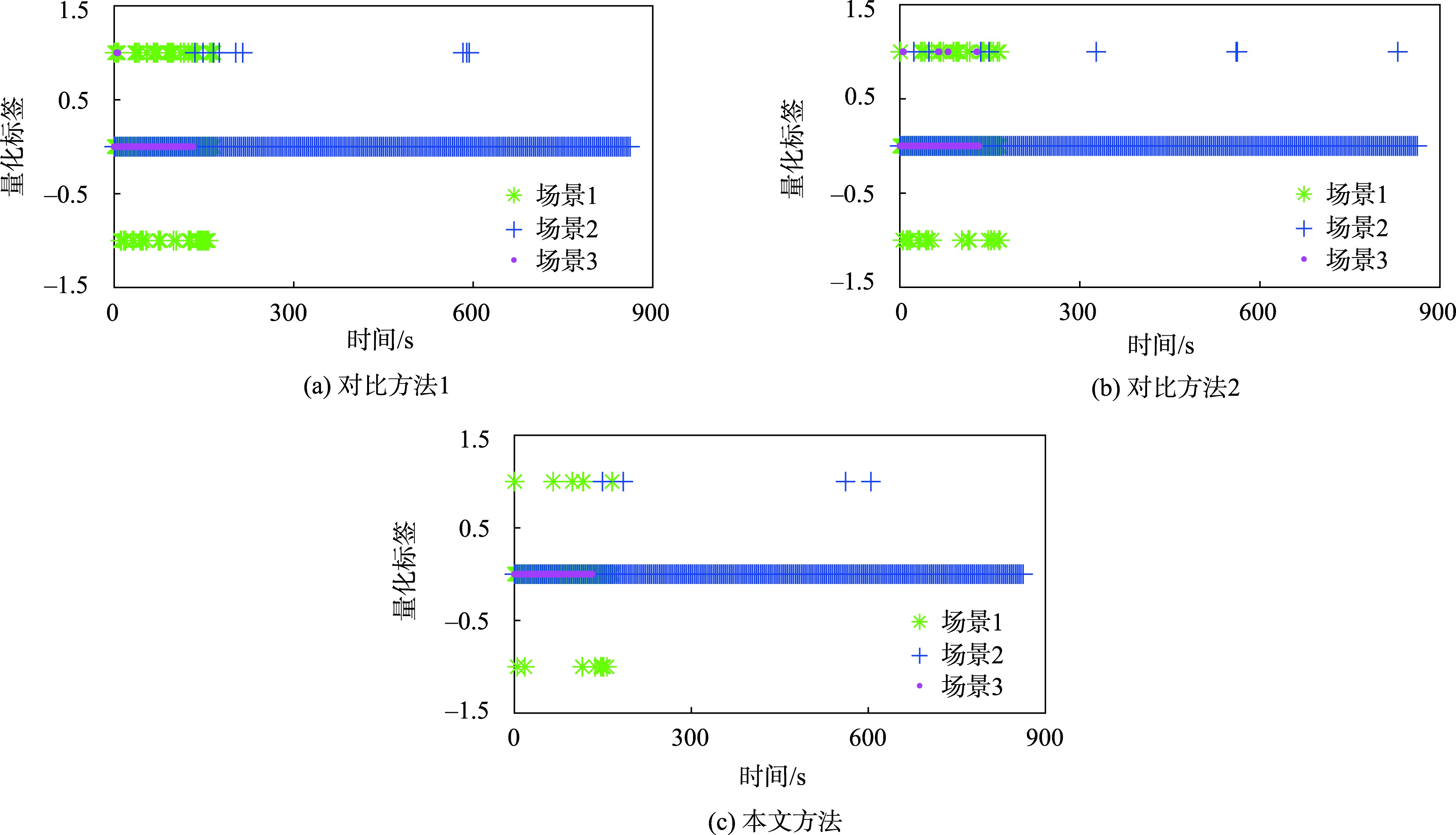
图3 退化检测结果的量化标签随时间变化序列
本文方法在三种实验场景中均能有效检测LiDAR点云退化情况,相较于两种对比方法,正确检测率分别提高6.92%、1.61%,错误检测率分别降低91.48%、66.16%。
3. LiDAR里程计定位效果
| 指标 | X轴RMSE/m | X轴MAXE/m | Y轴RMSE/m | Y轴MAXE/m | 运算效率/s |
|---|---|---|---|---|---|
| IA-LO | 1.2664 | 3.4359 | 0.0302 | 0.1094 | 0.0069 |
| ICP-LO | 7.8950 | 16.4174 | 0.0326 | 0.1363 | 0.0659 |
| FR-LO | 12.6668 | 24.9502 | 0.0549 | 0.1492 | 0.0019 |
在退化环境中,本文提出的IA-LO方法相较于ICP-LO和FR-LO的定位精度显著提高,X-Y平面的定位均方根误差分别降低了83.96%、90.00%,最大误差分别降低了79.07%、86.23%。
在非退化环境中,IA-LO定位精度可达厘米级,同时保证较高的处理效率(单次帧间配准0.0069s),满足SLAM实时性需求。
结论与展望
主要结论
激光强度修正
修正正确率达93.34%,配合"米字搜索"方法有效提取退化环境中的非退化特征。
退化检测
退化点云正确检测率98.58%,非退化点云错误检测率仅2.24%,显著优于对比方法。
定位精度
在退化环境中,定位RMSE降低83.96%-90.00%,最大误差降低79.07%-86.23%。
适用范围
不依赖其他传感器,设备成本低,复杂度低,具有显著二次开发优势。
未来工作
方法优化
- 构建更全面的特征体系,优化特征筛选算法
- 采用局部拟合及插值方法提高激光强度修正精度
- 改进动态目标处理,提高人体等目标的修正效果
系统集成
- 与SLAM后端优化方法结合,提高室外环境适用性
- 研究关键帧筛选和回环检测优化方案
- 开发完整的鲁棒LiDAR SLAM框架