实验结果
实验数据
路网匹配实验选取德国安斯巴赫地区作为测试区域,测试地区面积约99.92 km²。路网数据源包括开放街道地图(OpenStreetMap,OSM)、TeleAtlas商业电子导航数据。
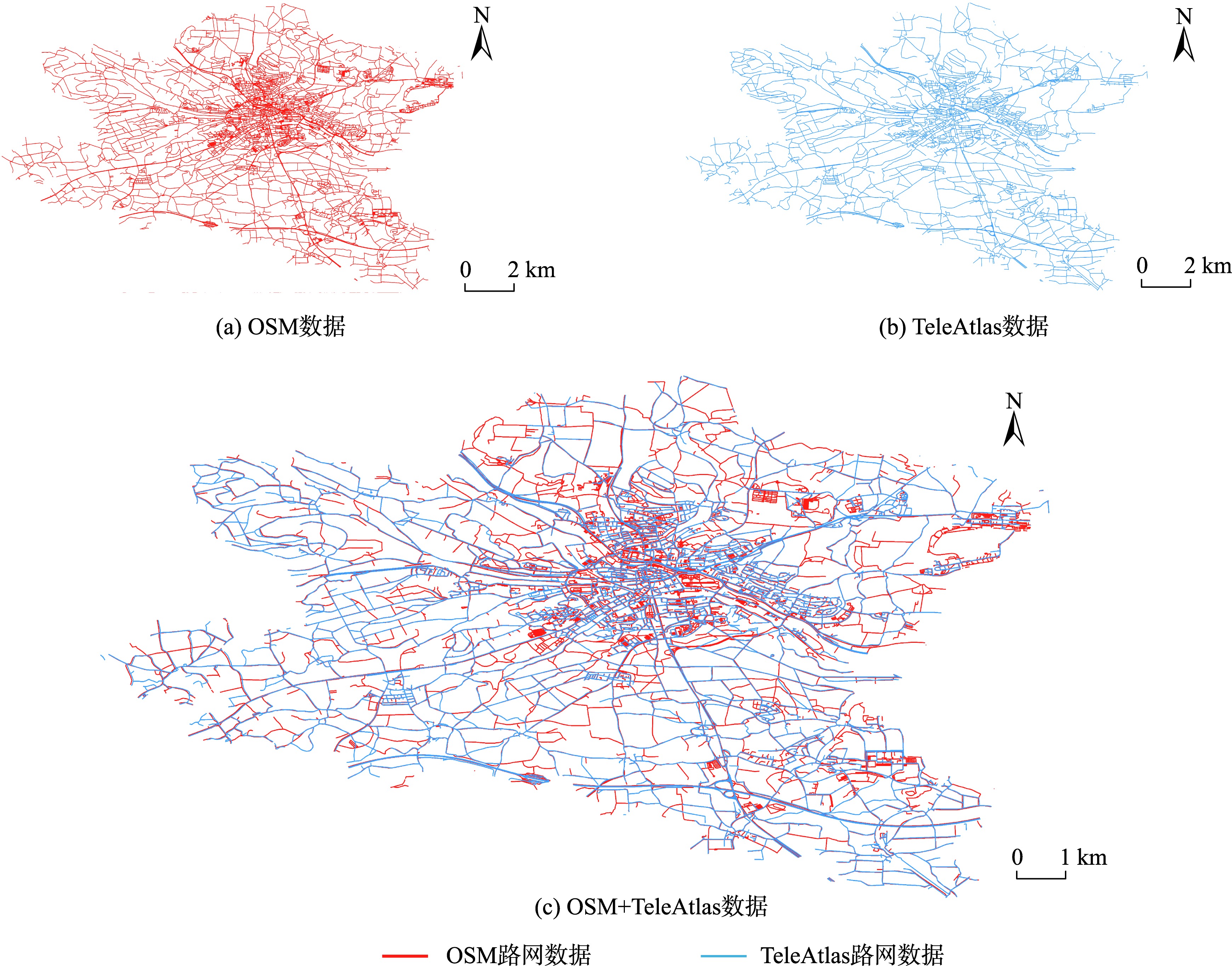
测试区安斯巴赫的OSM和TeleAtlas路网数据对比
OSM数据
- 原始数据:6,258条道路
- 预处理后:12,785条道路
TeleAtlas数据
- 原始数据:5,024条道路
- 预处理后:7,523条道路
性能比较
为验证本文方法的有效性,选取路网匹配经典算法限定笔划算法(DSO)、直接应用图神经网络的图卷积网络方法(GCN)、本文参考的地理空间图嵌入方法(GraphSAGE,GS)、和本文提出的改进邻域聚合图嵌入方法GS+S、GS+P、GS+SP进行实验对比。
| 方法 | 匹配正确率 | 召回率 | 匹配成功率 |
|---|---|---|---|
| DSO | 81.25% | 82.60% | 73.87% |
| GCN | 76.21% | 76.24% | 68.21% |
| GS | 75.66% | 77.51% | 69.31% |
| GS+S | 87.21% | 77.87% | 69.67% |
| GS+P | 82.87% | 81.46% | 72.89% |
| GS+SP | 87.27% | 84.37% | 75.26% |
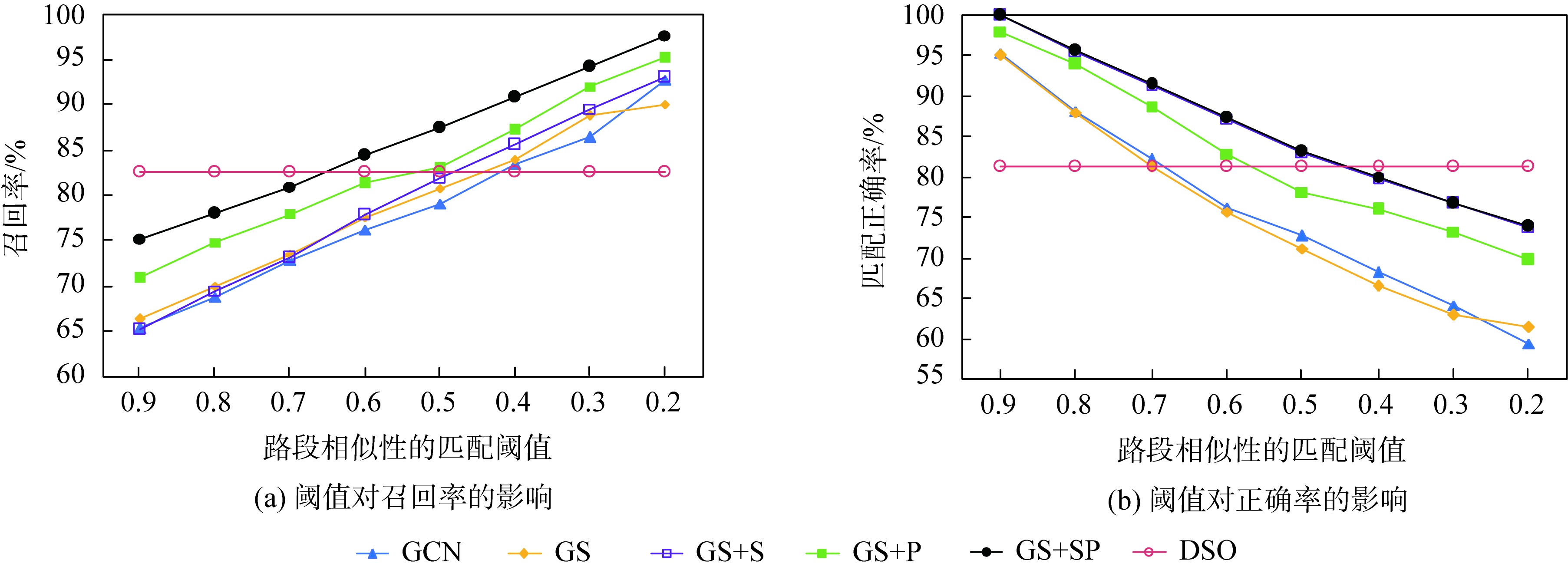
不同阈值下匹配正确率及召回率
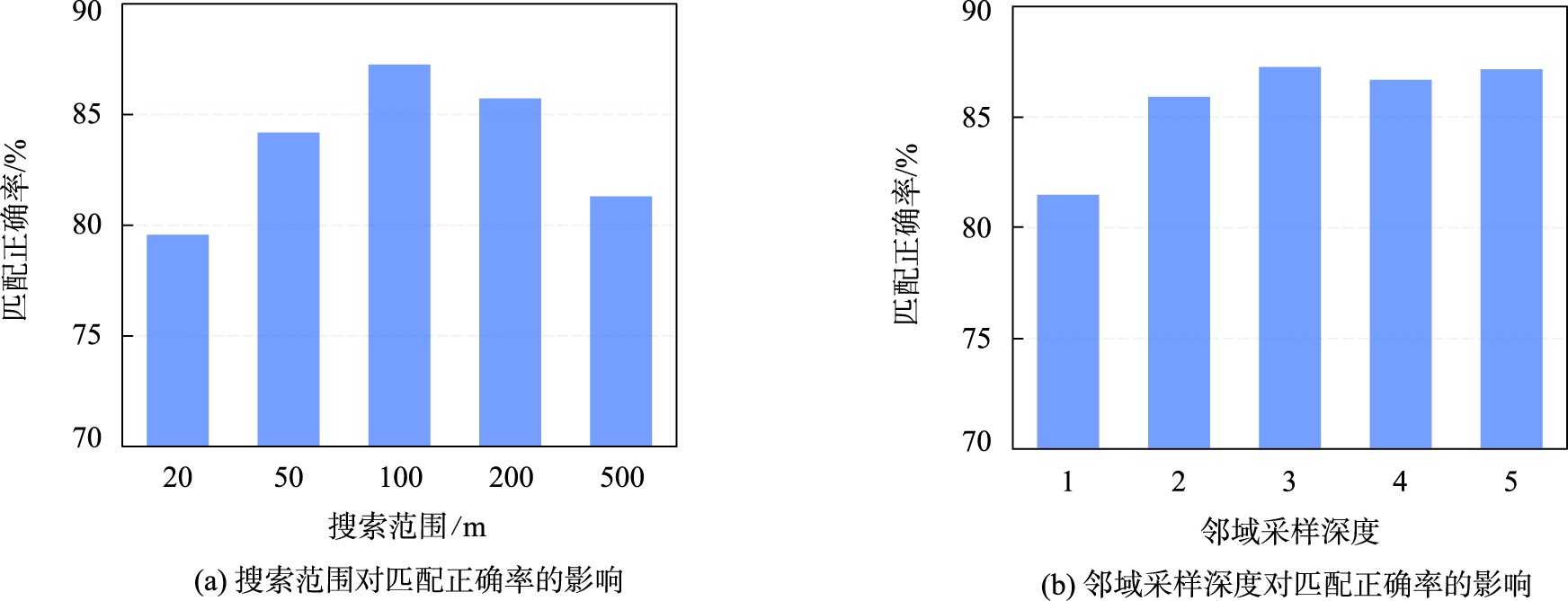
不同参数设置下的匹配正确率
匹配结果可视化
本文算法可以有效匹配不同来源的路网数据。在交叉路口、网格路段等较为复杂的路段,算法都能成功实现路网匹配。
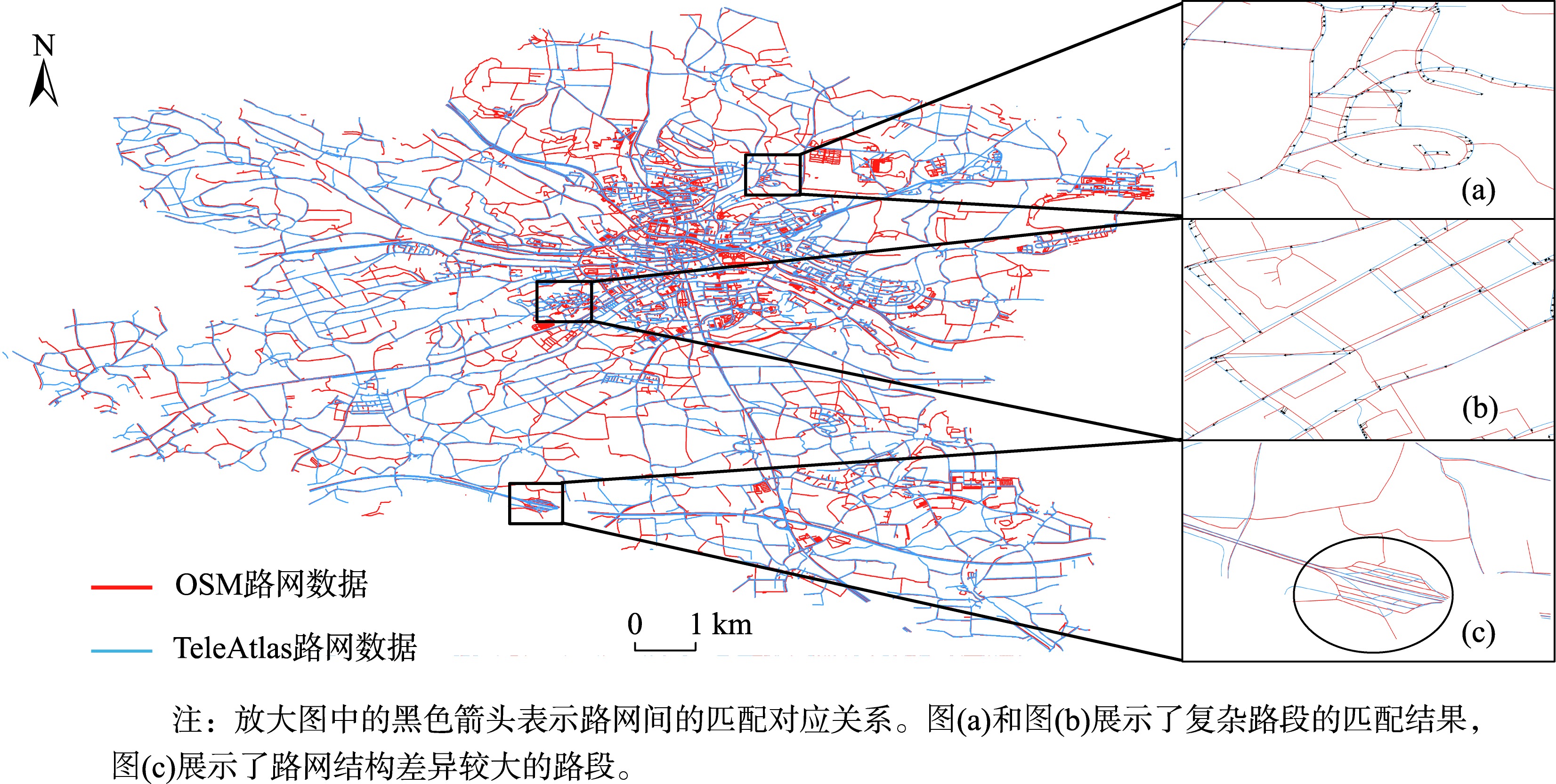
测试区域OSM和TeleAtlas路网匹配结果可视化


