研究方法
城市街道景观三维构建
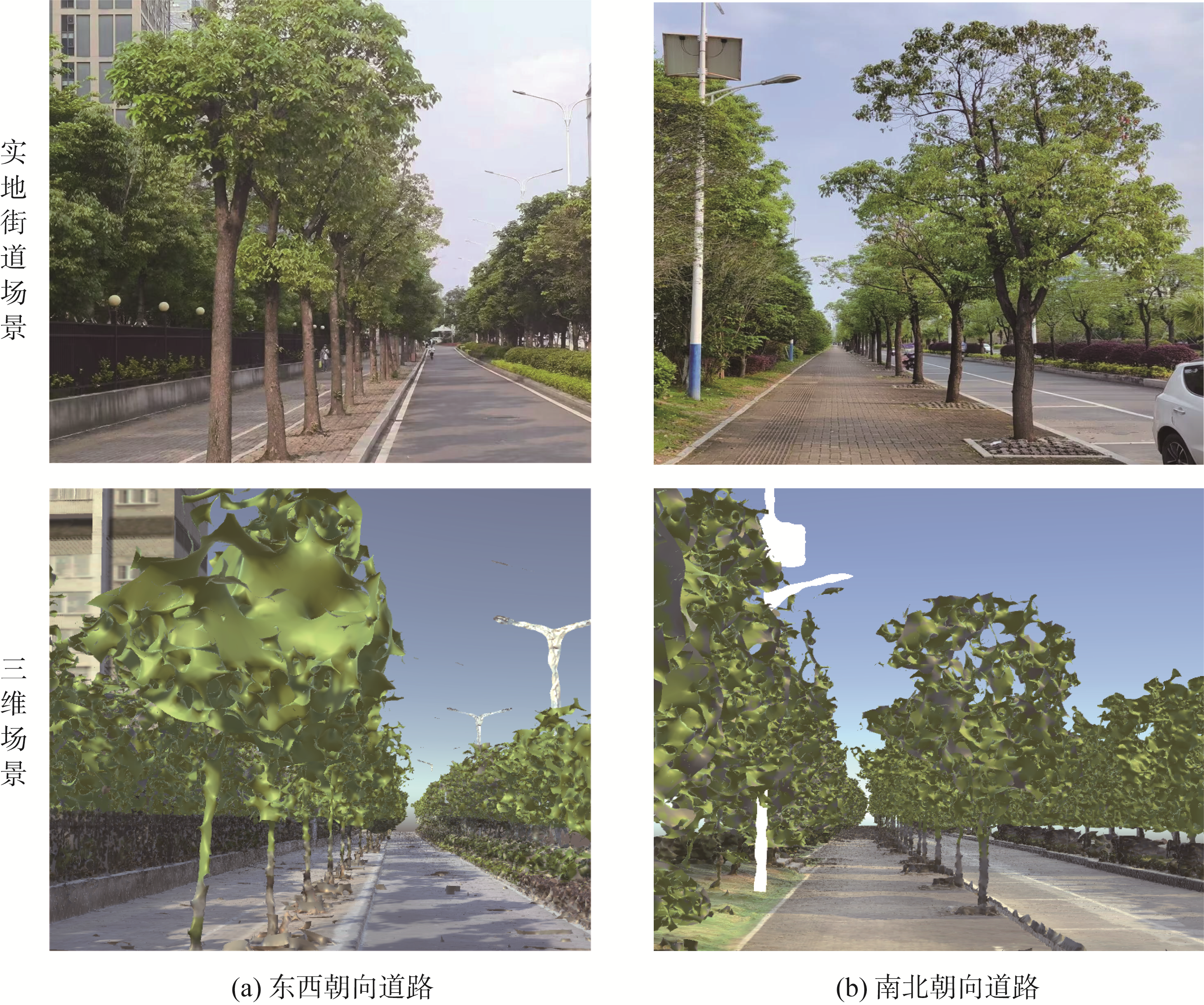
分为硬质景观构建与树木模型构建两部分。街道景观现状模拟采用实景三维技术思路,基于激光点云数据和建筑物矢量数据进行三维重建;而对规划中或未来情景的模拟采用参数化或规则的过程式模拟方式。
街道绿化树木遮荫效果模拟
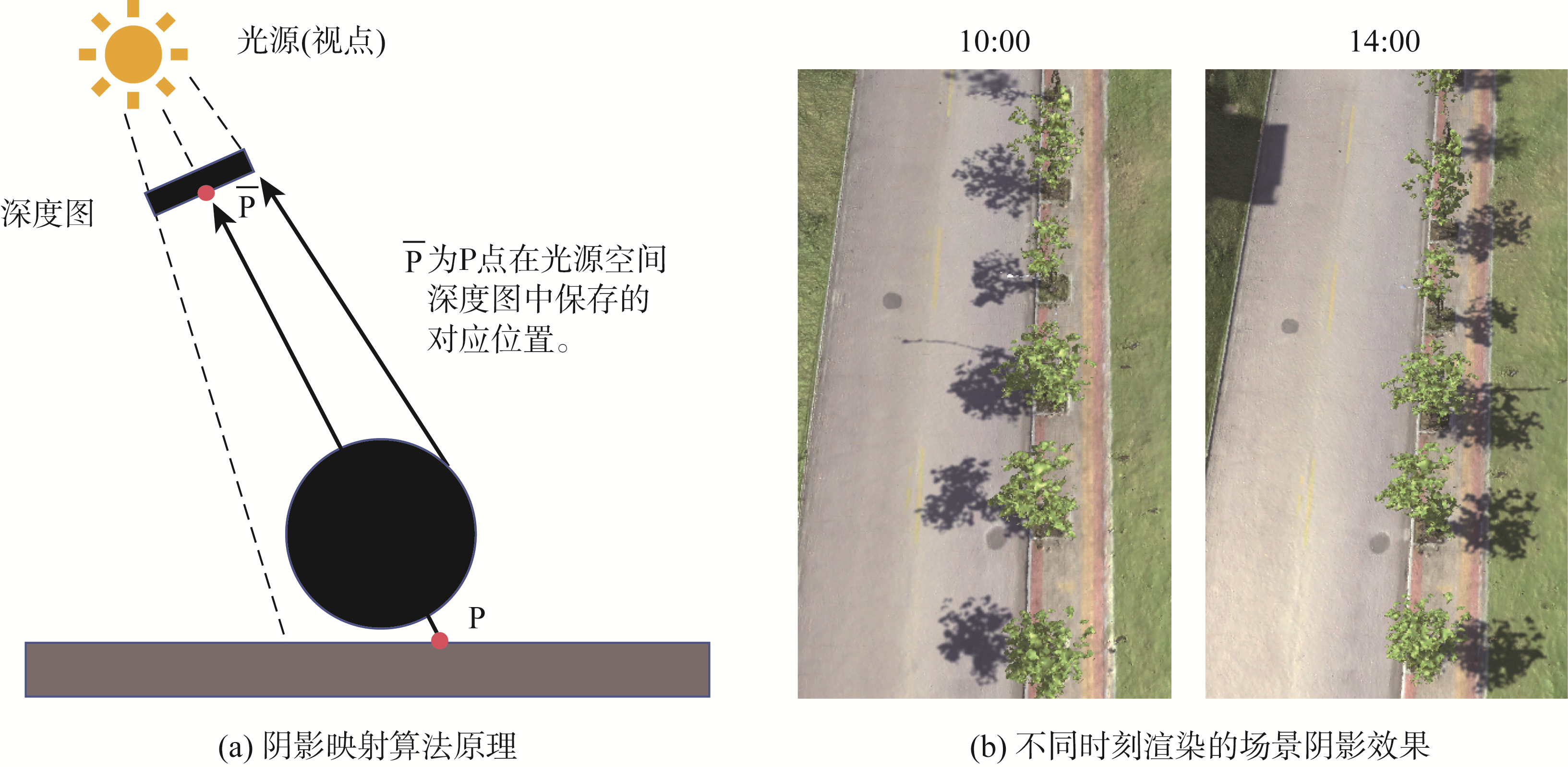
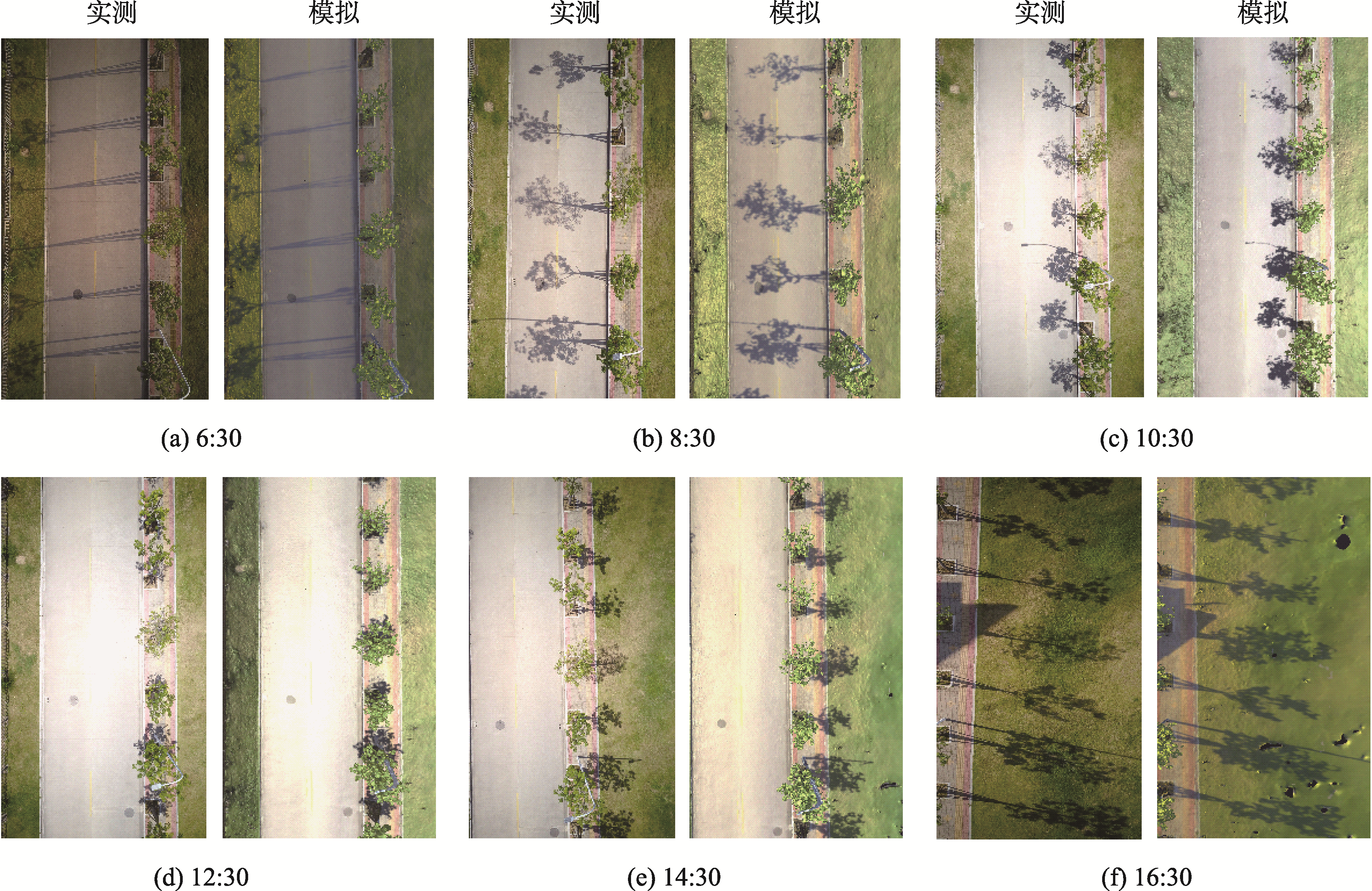
以Unity3D为虚拟地理环境构建平台,集成建筑物、道路、树木等主要地理要素的三维模型,形成城市街道三维场景,并基于Unity3D光照工具,通过自主编写脚本程序实现对街道绿化树木遮荫效果的模拟和量化。
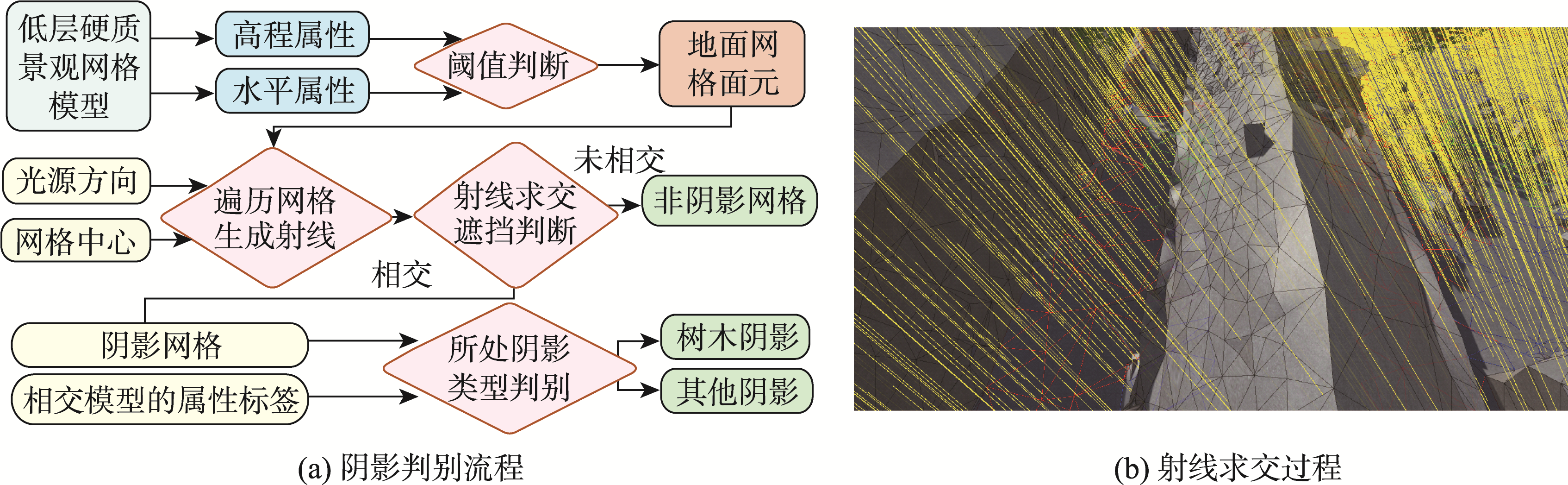
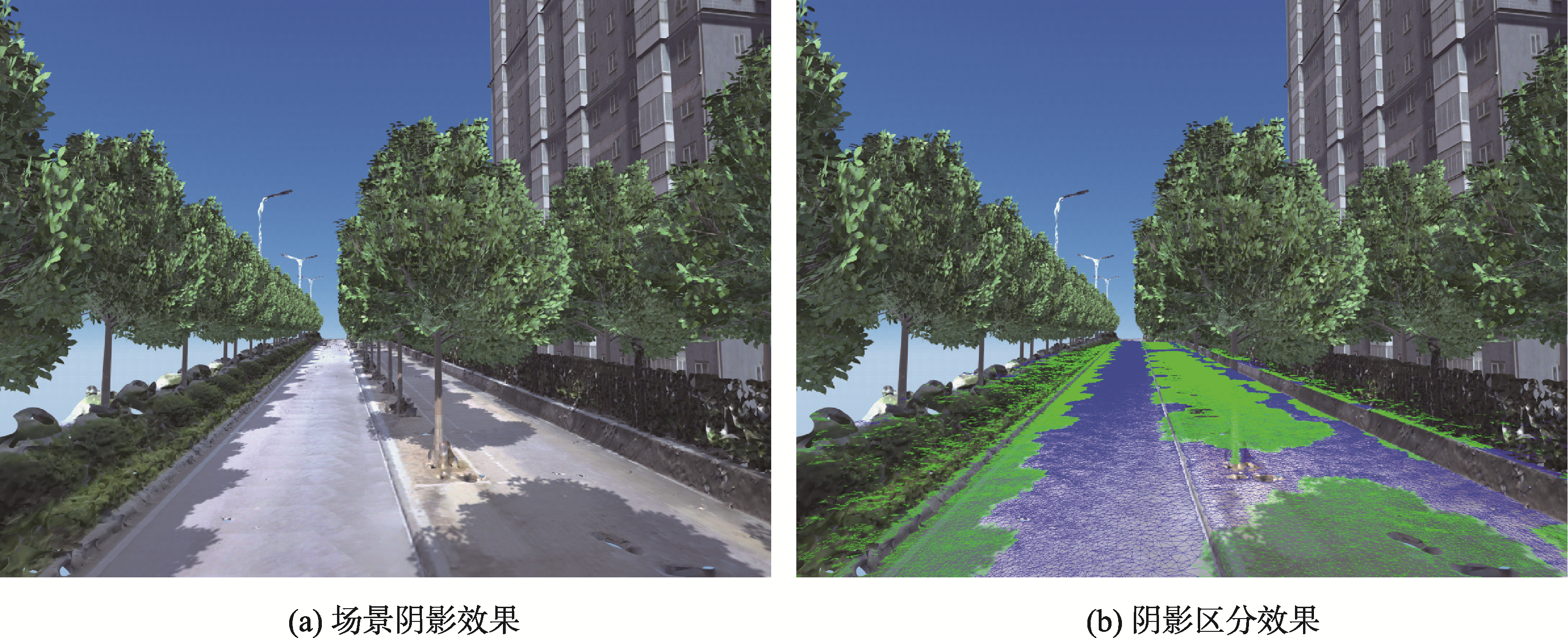
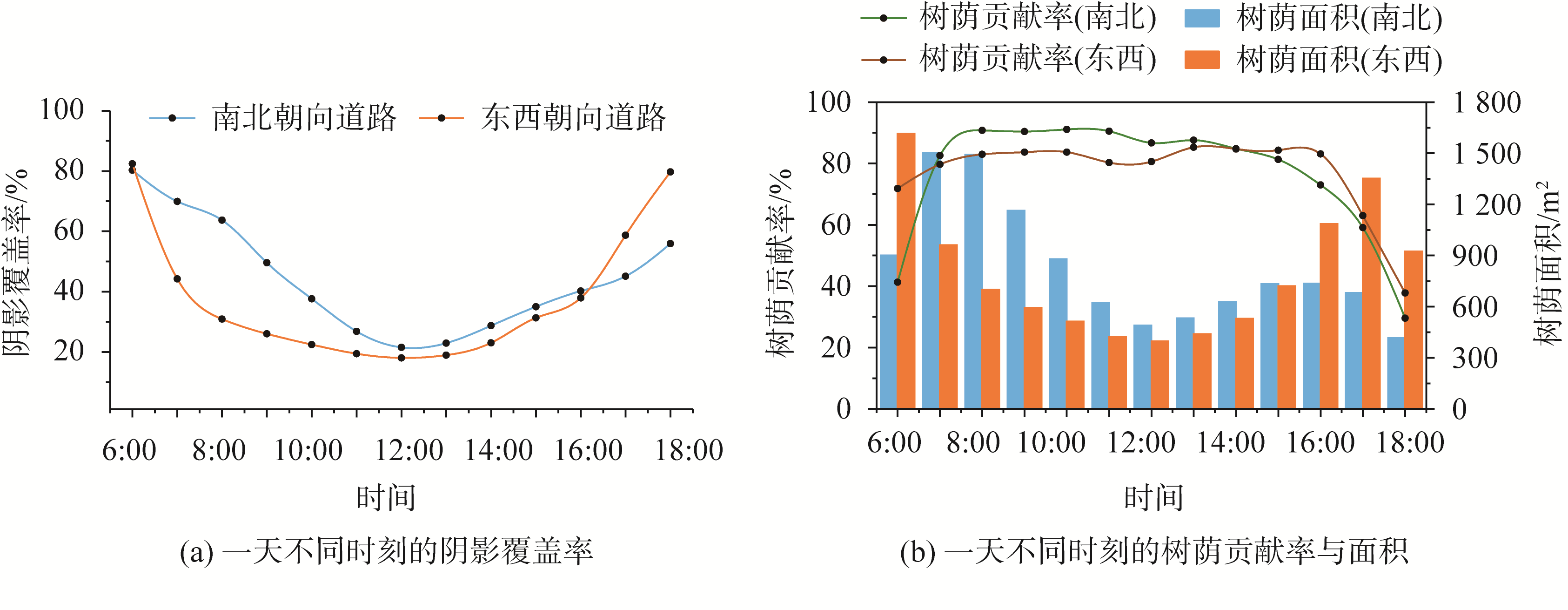
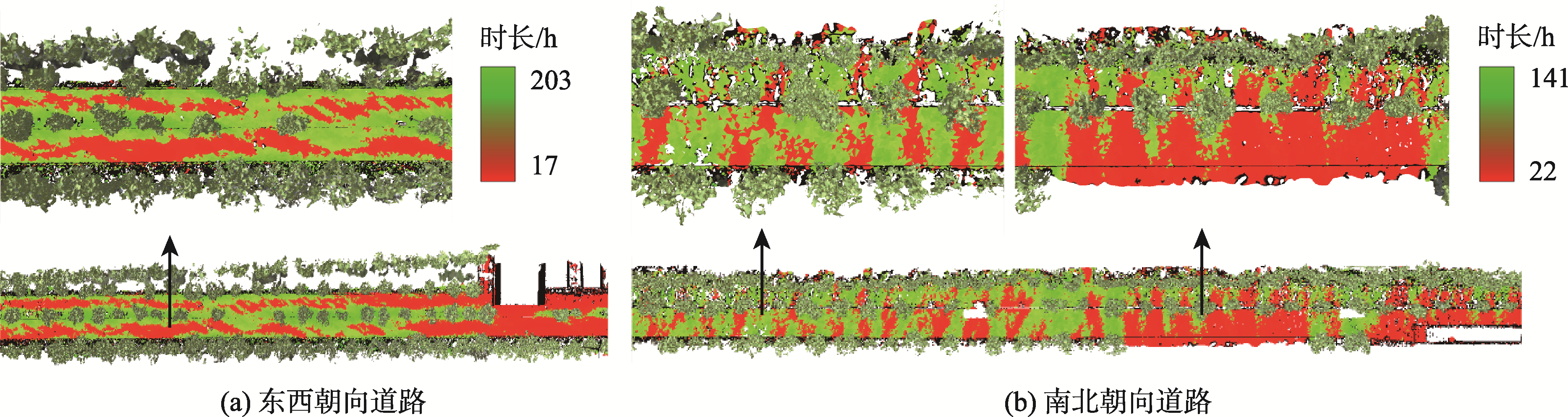
树荫资源量化
通过设定模拟计算的起始与结束时间,按照一定时间间隔,模拟每个时间点遮荫效果。基于三角网格构建的三维场景可以获取任意三角网格的属性值,如每个三角网格的面积,记录每个时刻对应的阴影面积、阴影覆盖类型。
技术流程图
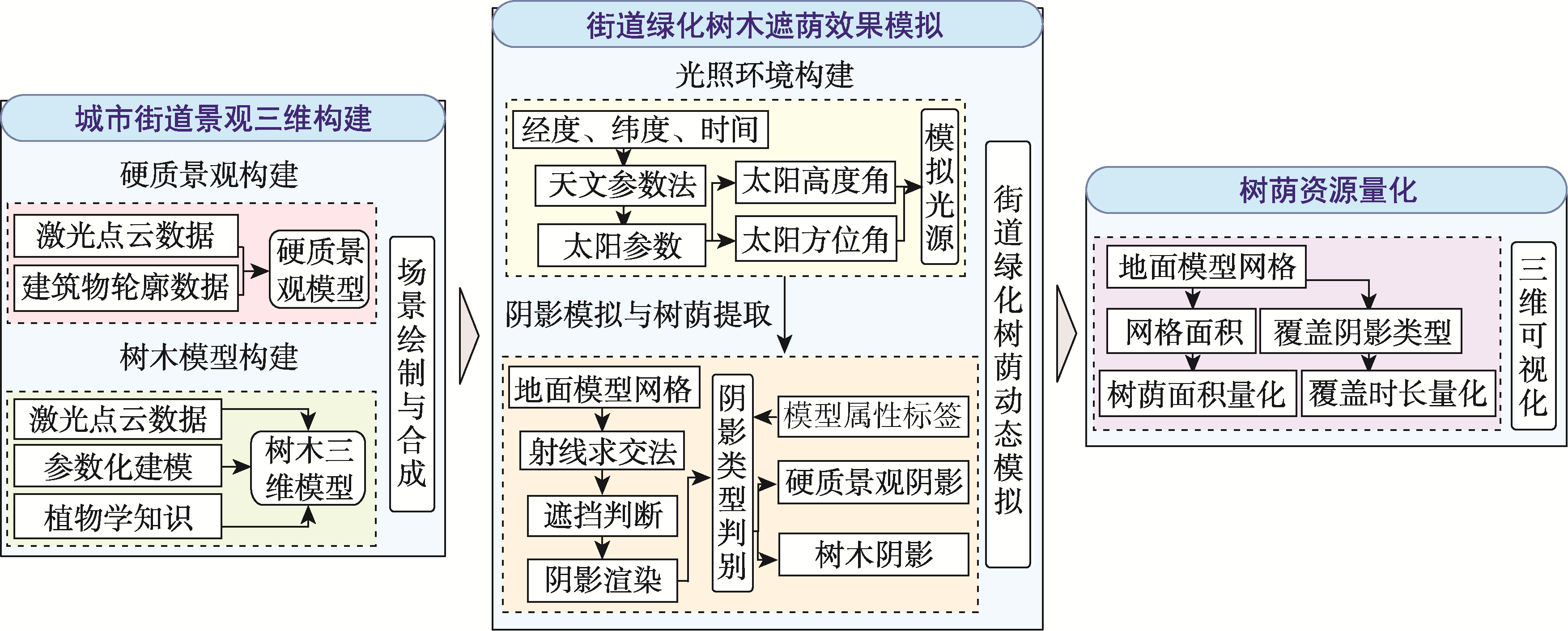
图1 树荫资源模拟与量化分析思路
硬质景观模型构建
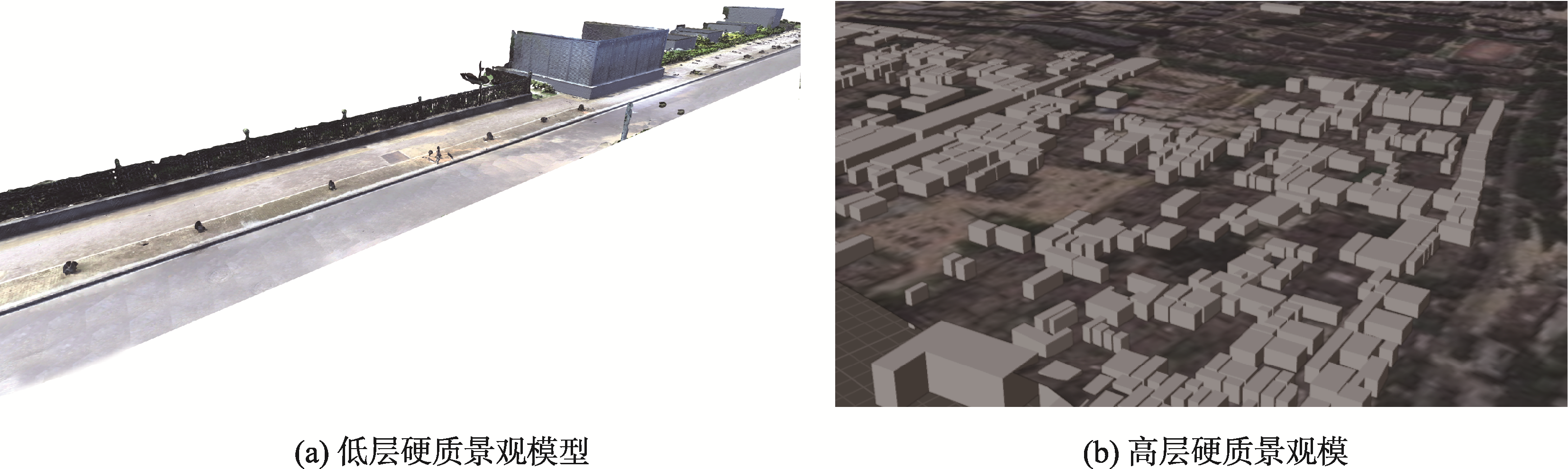
图2 硬质景观模型构建
道路、围护栏杆、路灯等低层硬质景观要素的三维重建,通过将全彩点云数据导入ContextCapture三维重建软件中进行重建,生成具有真实地物纹理的表面三角网格模型。建筑物等高层硬质景观要素则基于OpenStreetMap获取的建筑物轮廓矢量的平面分布图层数据,及其楼高属性信息,通过"拉升"建筑物轮廓至对应楼高来快速构建建筑物模型。
树木模型构建
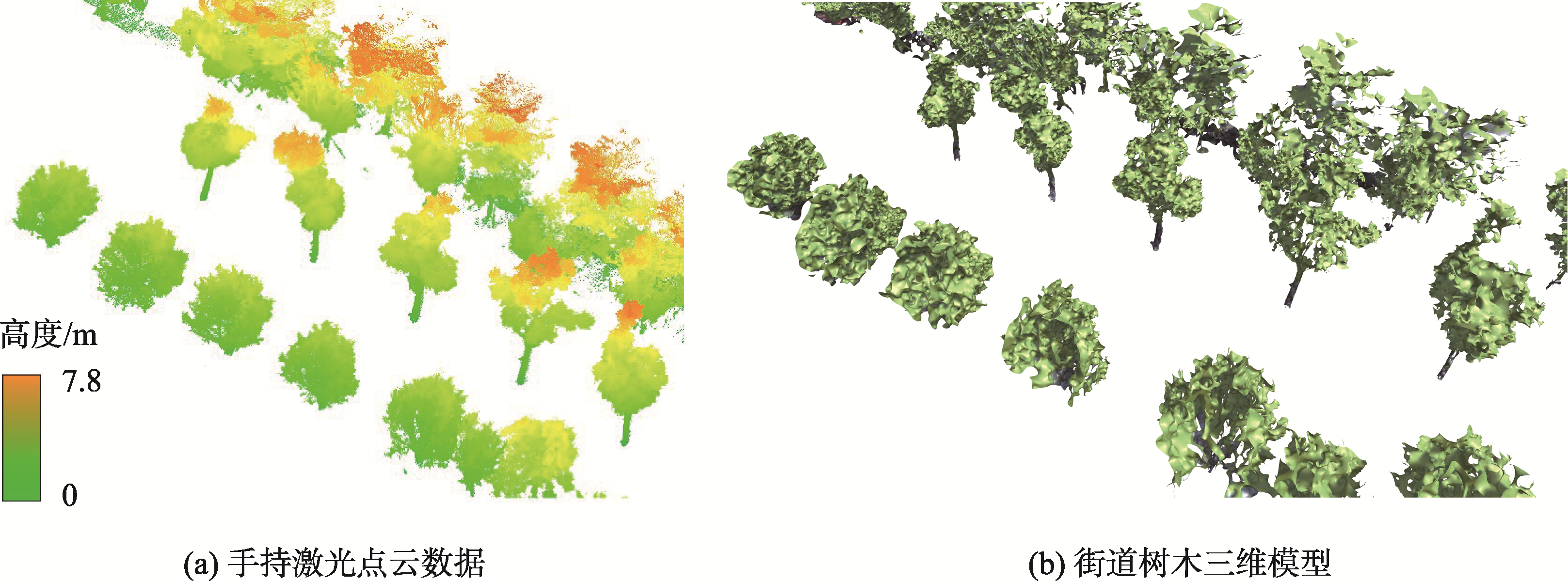
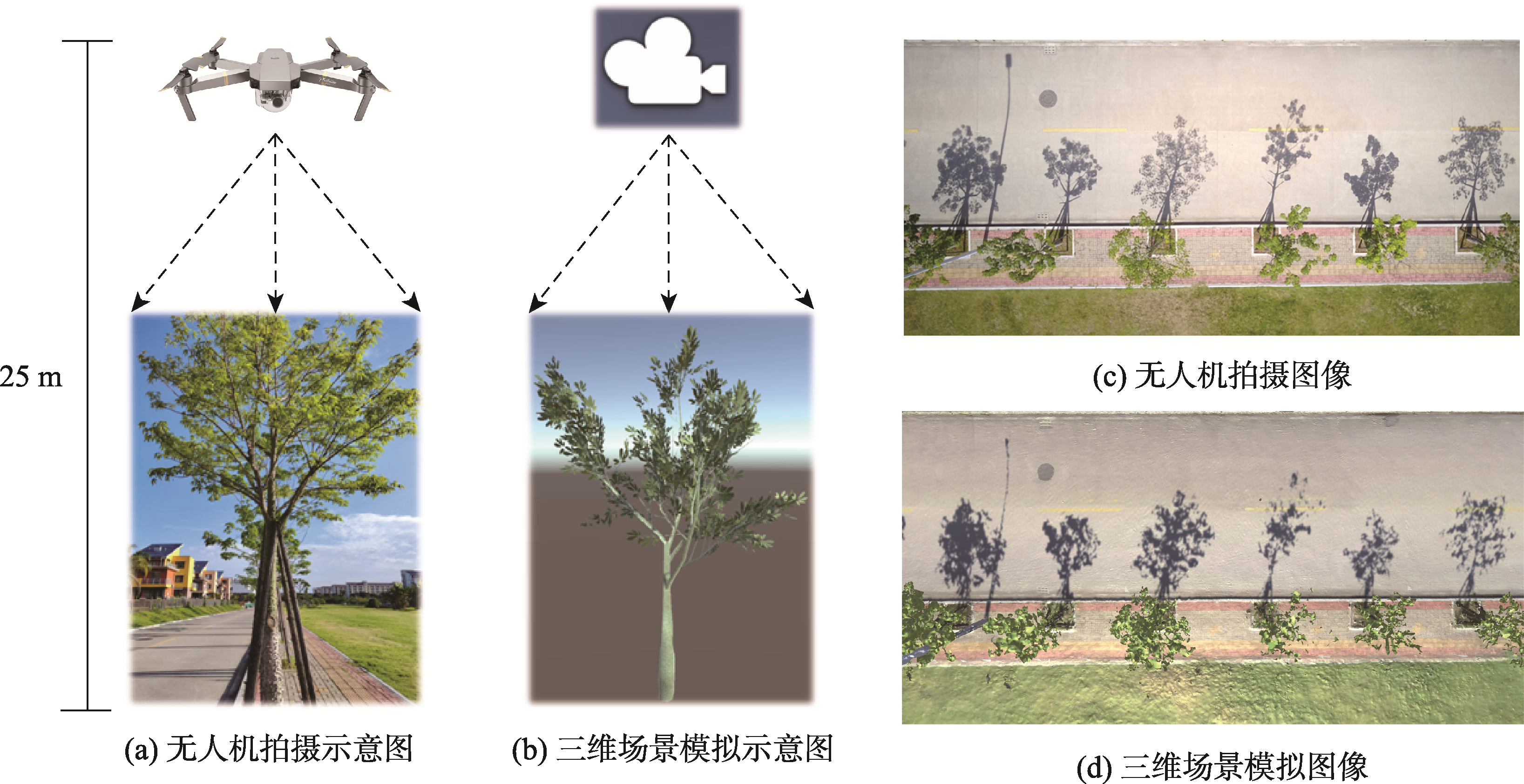
图3 部分树木原始点云和三维模型
为了真实重建街道树木景观,采集高精度的激光点云数据,使用三维重建软件ContextCapture建立树木冠层的三维模型。面向城市绿地规划方案的模拟评估和未来园林情景模拟的需要,根据绿化植物的形态结构特征,通过户外收集的树木形态结构参数和树叶、枝干的图像数据,利用ParaTree参数化树木建模软件构建树木三维模型。