模型介绍
WSTAR-BiLSTM模型结构
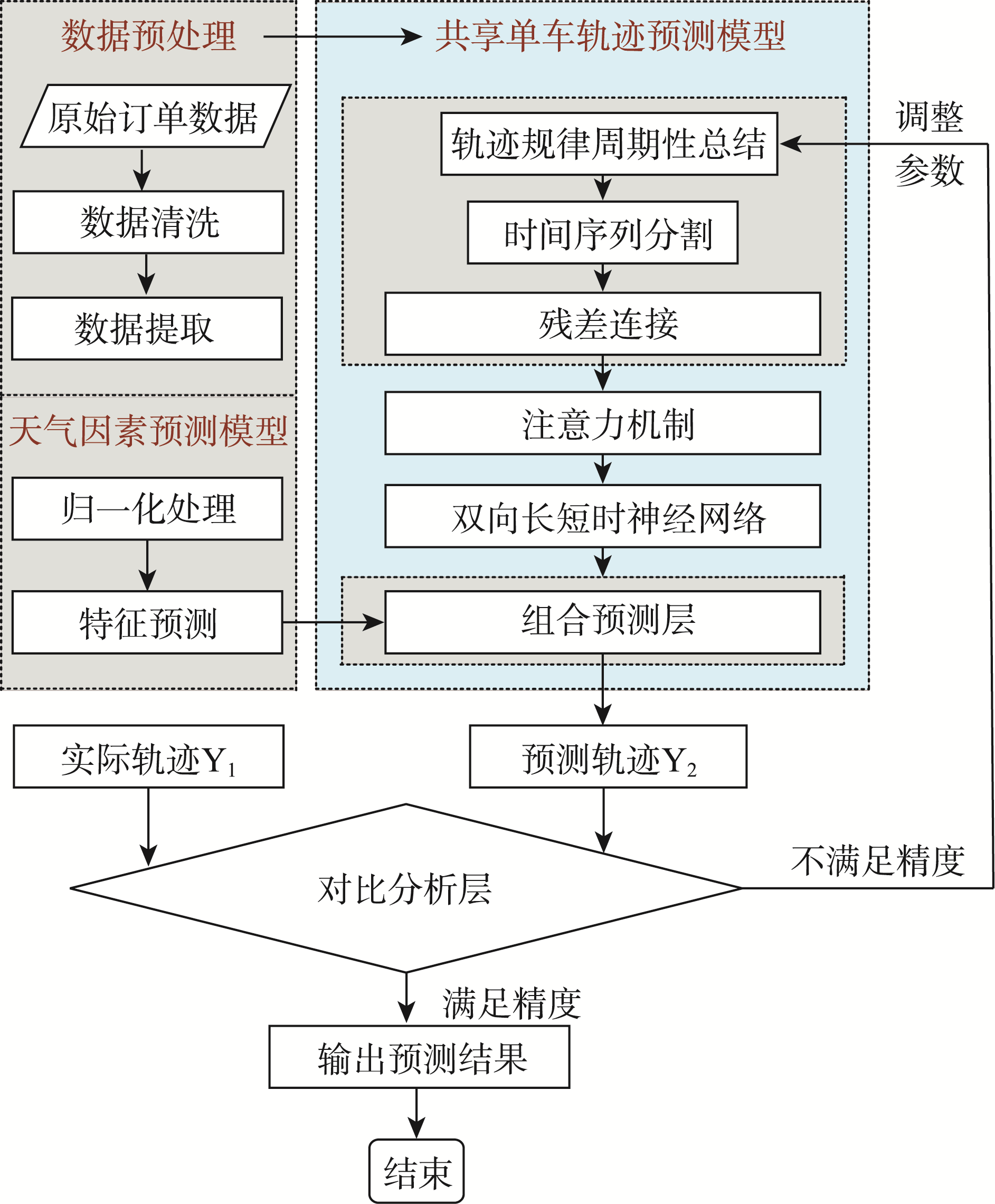
本研究基于传统轨迹预测方法,结合天气因素,提出融合天气因素与时空注意力残差双向网络的共享单车轨迹预测模型(WSTAR-BiLSTM)。
- 数据预处理:将原始订单数据通过清洗与提取,处理为数据集;将天气因素数据归一化处理
- 残差网络层:通过跳跃连接传递不同时间步长的信息给后续层,捕捉较长时间跨度上的轨迹规律
- 注意力机制:自适应地分配权重给不同的时空位置,增强模型对重要时空特征的关注度
- 双向长短时神经网络层:从历史轨迹推导出未来轨迹变化,同时根据未来轨迹调整对当前时间步的理解
数据与方法
数据来源
本实验数据来源于2021年数字中国大赛公开数据,包含2020年12月21日-25日厦门岛早高峰共享单车行驶轨迹数据,共58万条记录。
数据字段含义:
- BICYCLE_ID: 加密后的单车ID号
- LATITDUE/LONGITUDE: 纬度/经度
- DATE_TIME: 锁状态更新时刻
- TEMPERATURE/WEATHER: 气温/天气现象
- WIND_SPEED/AIR_QUALITY: 风力等级/空气质量
方法流程
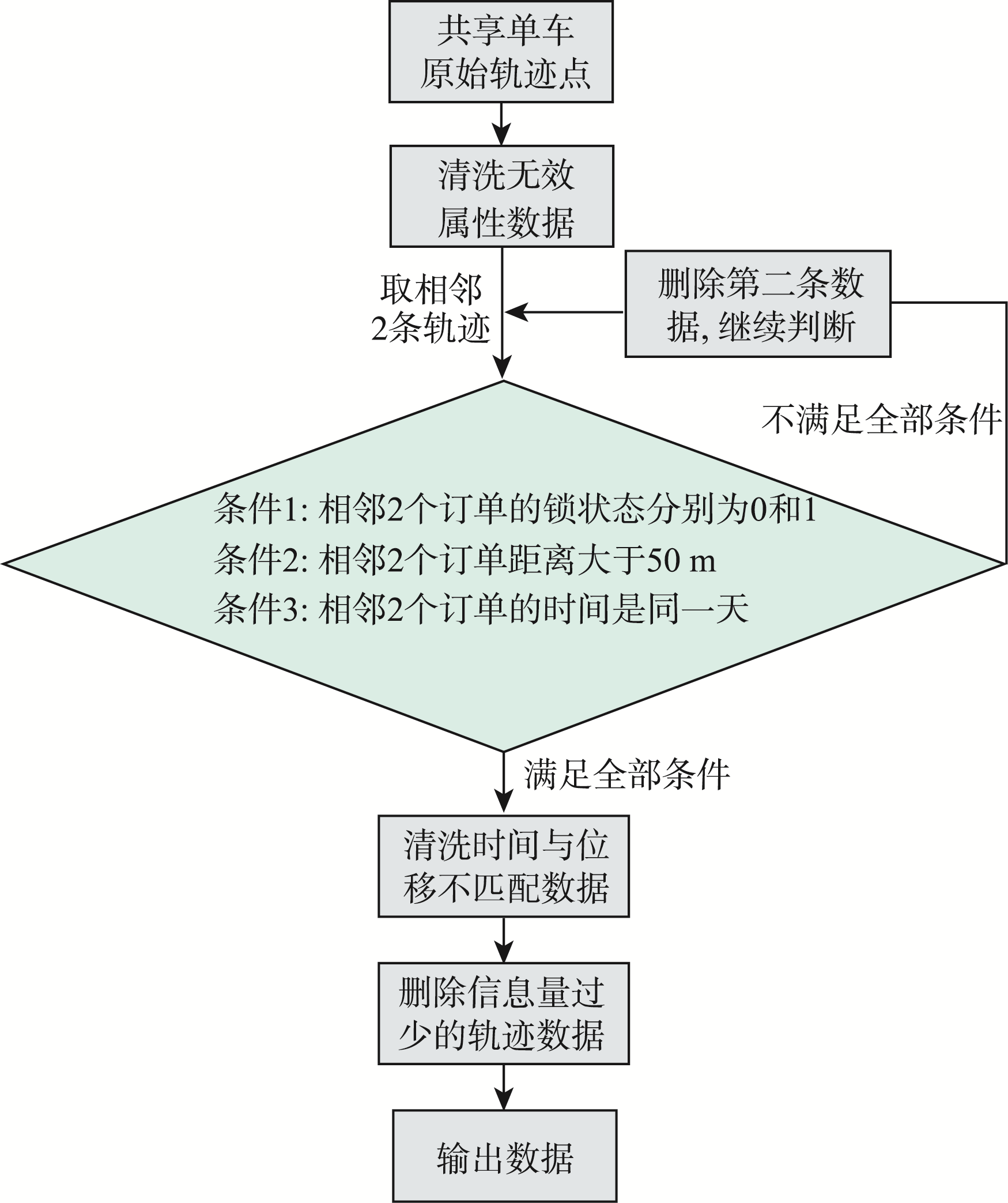
数据预处理流程:
- 删除无效属性数据
- 判别相邻两条数据,满足条件进入下一步
- 清洗时间与位移不匹配的数据
- 计算单车的速度变化率,剔除异常数据
- 删除轨迹点过少的数据
实验结果
预测误差对比
| 模型 | ATE(m) | RTE(%) |
|---|---|---|
| WSTAR-BiLSTM | 1.46 | 4.91 |
| STAR-BiLSTM | 2.53 | 9.77 |
| WSTR-BiLSTM | 2.69 | 11.87 |
| WSTA-BiLSTM | 2.99 | 15.71 |
| BiLSTM | 3.29 | 17.74 |
模型成长性
WSTAR-BiLSTM和STAR-BiLSTM模型的预测误差(ATE)均随着反馈次数的增加而降低,降低速率基本一致,说明2个模型均具有一定的学习成长能力。
实际轨迹与预测轨迹对比
以2020年12月21日某4辆共享单车出行轨迹为预测结果输出示例。WSTAR-BiLSTM模型的预测轨迹基本接近真实轨迹。

影响因素分析
出行时空特性
空间分布
共享单车会根据城市布局、自行车道分布、交通拥堵状况及用地性质等空间因素选择不同的出行路线。

时间分布
早高峰7-9时虎仔山路、莲前东路存在大量机动车和少量非机动车出行导致道路拥堵使得共享单车出行不便;而9-11时吕岭路和文兴西路道路畅通,骑行者大多选择吕岭路和文兴西路进行出行骑行。
天气因素的影响
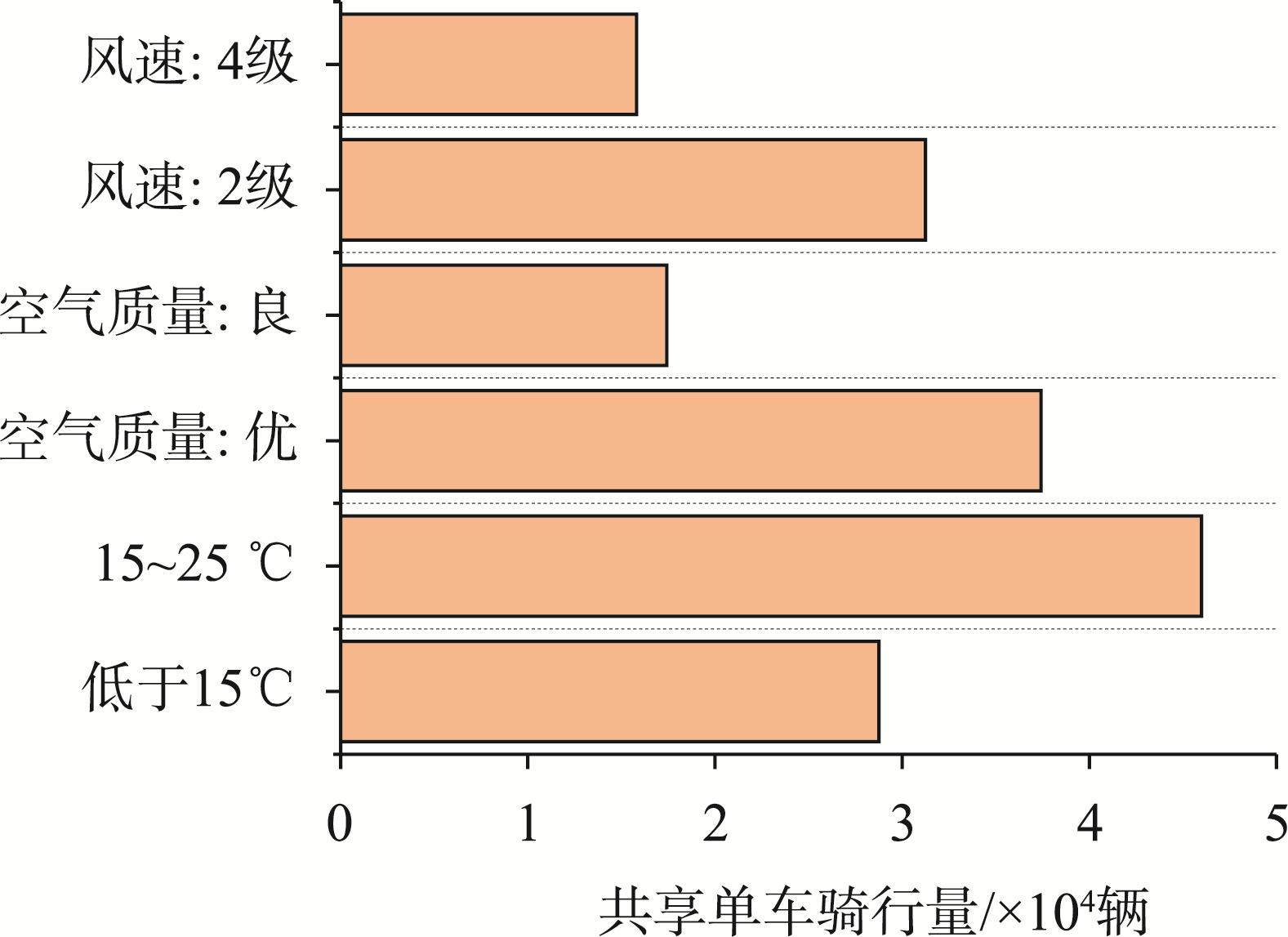
- 气温:当日最低气温低于15°C时,骑行量较小;15~25°C时为适宜出行温度,骑行量较大
- 天气现象:晴朗、多云天气的骑行轨迹较为稳定,雨天人们会选择有遮蔽物的路径骑行或不使用共享单车出行
- 风速:风速等级高时,共享单车骑行量较少;风速等级低时,共享单车骑行量较大
- 空气质量:长期在低空气质量下骑行可能对人体健康造成危害,使得人们共享单车出行减少
研究结论
为有效提高共享单车出行轨迹的预测精度,构建融合天气因素与时空注意力残差双向网络模型(WSTAR-BiLSTM)。模型基于共享单车轨迹时空数据与天气因素数据,实现了对共享单车轨迹的精准预测,对比传统模型,其收敛速度更快、预测精度更高。
主要结论:
- WSTAR-BiLSTM模型的绝对轨迹误差与相对轨迹误差分别为1.46米与4.6%,预测精度显著高于对比模型```html
- WSTAR-BiLSTM模型不仅继承了普通残差网络模型的优越性,还创新性地融合了注意力机制与天气因素的影响
- 模型具有智能学习与成长特性,预测精度随反馈次数的增加而进一步提高
- 天气因素(气温、天气现象、风速及空气质量)对共享单车出行轨迹选择存在显著影响
研究展望:
由于数据集与研究条件所限,模型中未能充分考虑单车用户出行路径选择的个体偏好性及其他因素的影响,数据覆盖天数也较少,长时序规律尚未得以验证。后续研究将逐步完善。