研究方法
技术路线
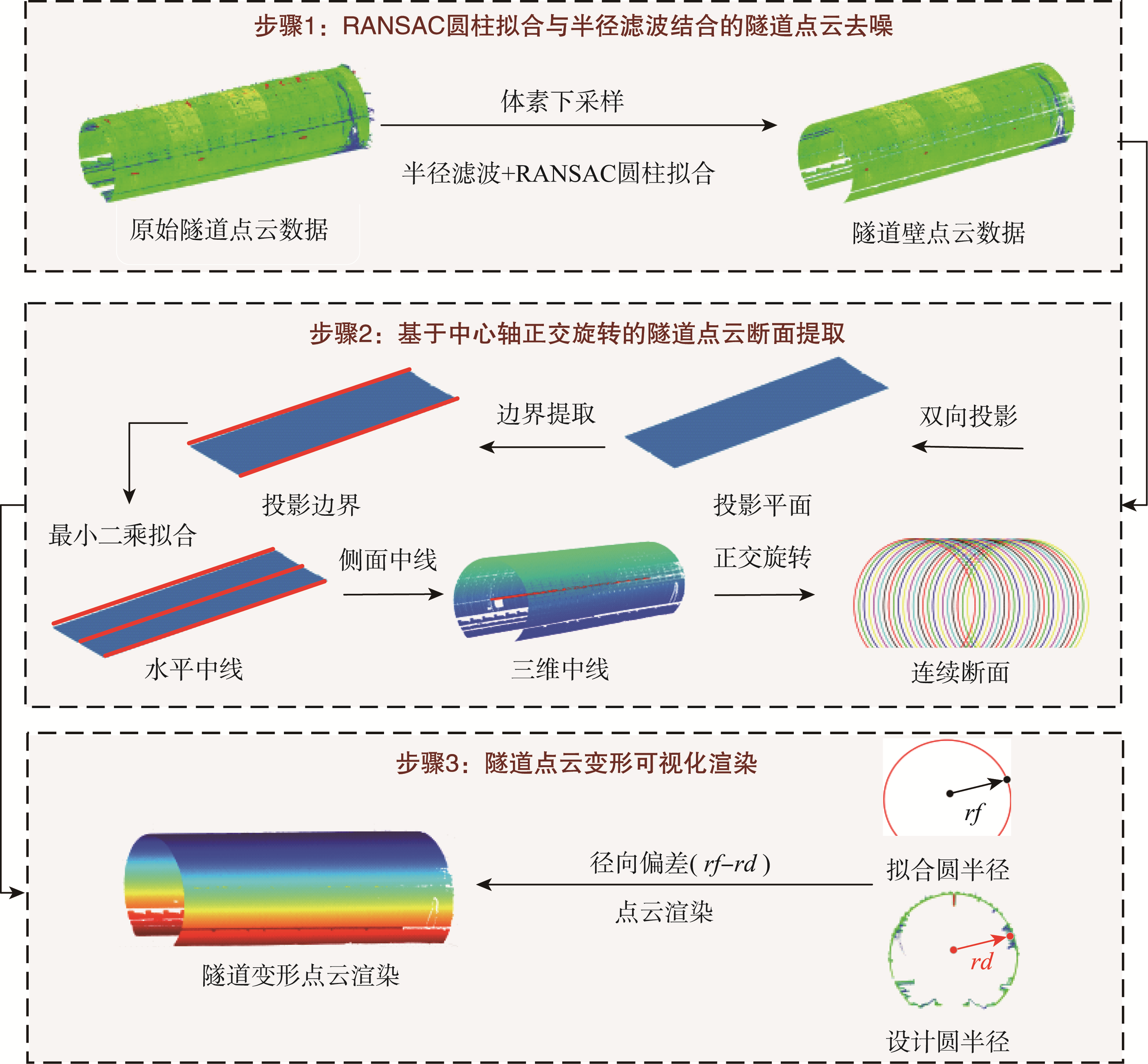
基于RANSAC圆柱拟合与半径滤波结合的去噪算法
本文通过提出的基于RANSAC圆柱拟合算法与半径滤波结合去噪算法对隧道场景中存在的离群点和噪声点进行滤除。
首先对原始隧道点云数据进行体素下采样处理,适当减少数据量,提高处理效率;然后通过半径滤波去除一些离群点;最后对隧道壁点云进行RANSAC圆柱拟合,设定阈值并确定模型参数,筛选出最优的圆柱模型,去除附着在隧道壁上的外点,得到滤波后的隧道壁点云。

基于二维投影的隧道中线估计
以隧道进口作为原点;定义隧道行进方向为X轴;定义垂直于X轴的横向方向为Y轴;定义隧道的垂直方向为Z轴。
当隧道较短且为直线段或小弯曲段时,双向投影效果良好,而本研究所选用的为短直线型隧道,通过双向投影的方式将去噪后的隧道点云分别投影到XOY平面和XOZ平面,利用边界函数boundary提取边界点云的向量索引,根据向量索引从投影后的平面点云中搜索边界点,从而获取边界点;然后采用最小二乘的方式对其进行直线拟合,得到两侧边界线,分别取两侧边界线的中线作为隧道在XOY平面和XOZ平面的水平中线和侧面中线。
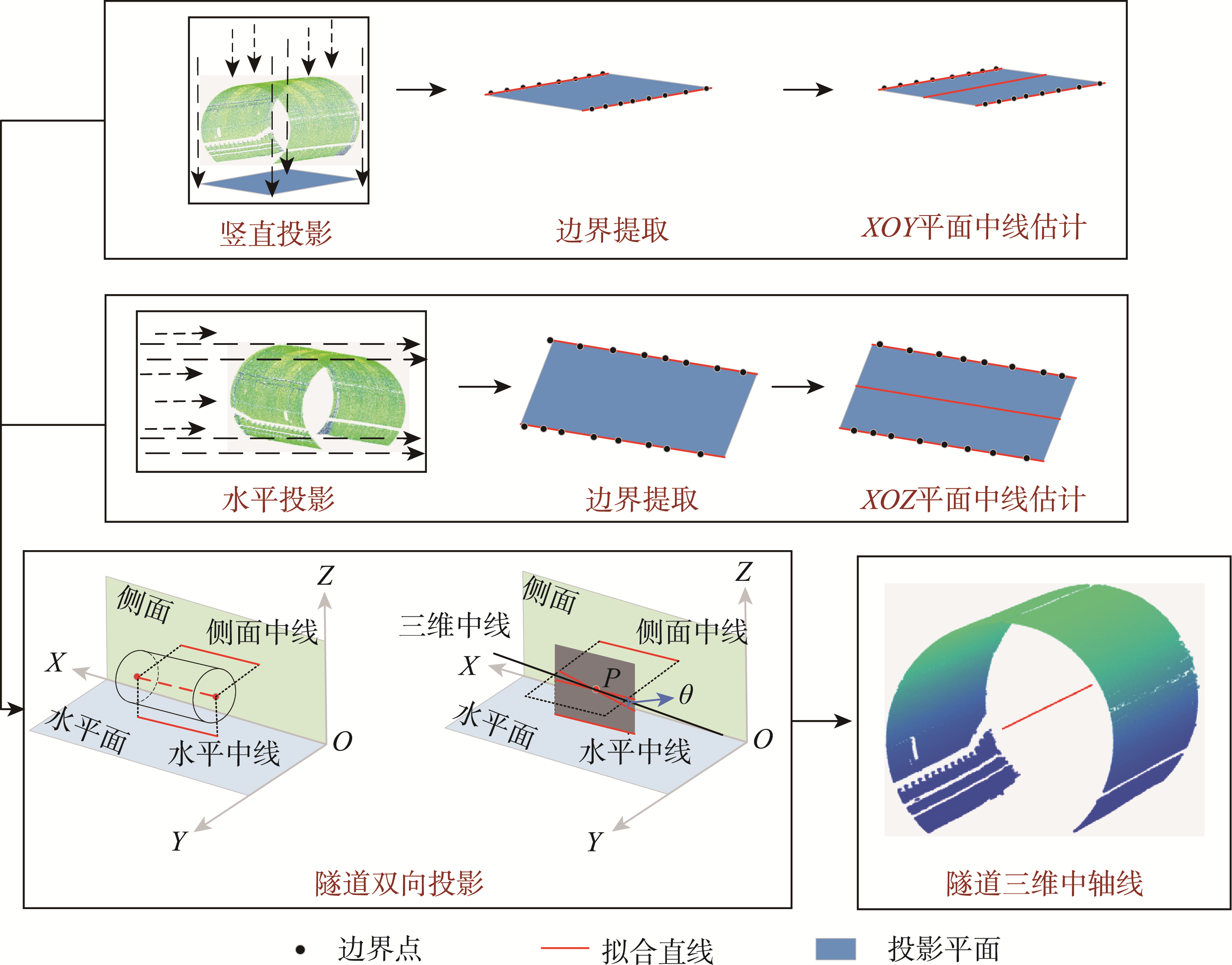
基于中心轴正交旋转的隧道断面连续提取
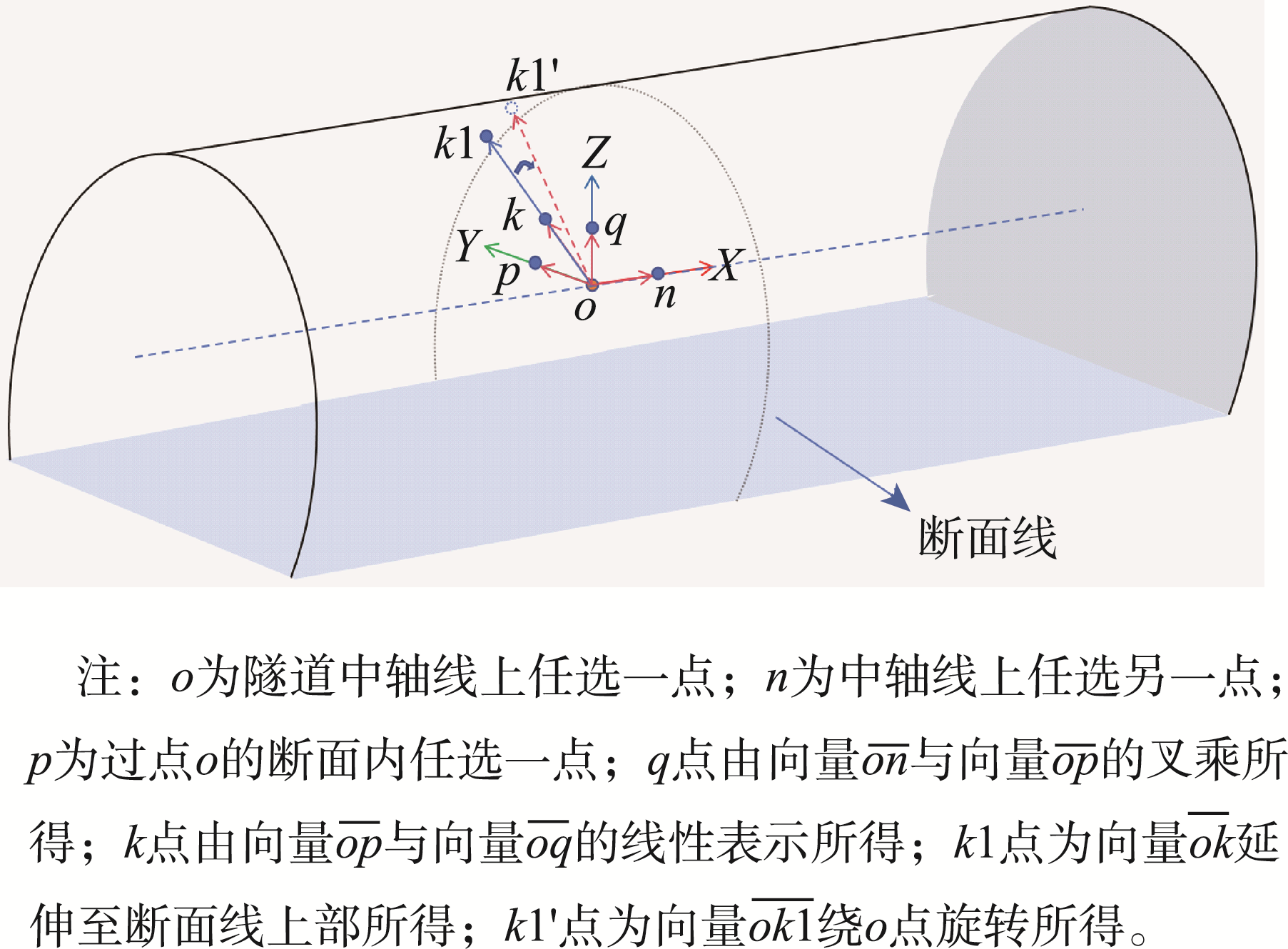
获取隧道中轴线后,提出一种基于中心轴正交旋转的隧道断面连续提取方法,利用与中心轴垂直的直线在其法截面内绕中心轴正交旋转与隧道壁相交得到断面点。
主要过程为:在中心轴上任取一初始点o,并另取一点n,作向量on,令过o点且垂直于中心轴的平面为μ,在平面μ内任取一点p,作向量op,求解垂直于向量on与op的向量oq,将op与oq的线性表示定义为ok,延伸或缩短ok至ok1,使其向量长度略微大于半径,将ok1绕中心轴正交旋转与隧道壁相交,由于点云离散性的特征,可能存在某处没有交点的情况,此时对断面点进行估计,取其在X轴方向距离最近的点为此处断面点,再对其进行最小二乘空间圆拟合,并在圆上以设定圆弧距离均匀地提取断面点,从而获取单个隧道断面点集,设定断面间距,对整个隧道点云数据进行隧道断面的连续提取。