1 引言
智能网联汽车是新一代人工智能技术的典型应用,需要有中国方案的智能网联汽车,包括计算、车载终端、云控、高精度动态地图、信息安全5个基础平台,能更好地满足中国的道路信息基础设施、联网运行的要求,进而实现自动驾驶。地图是智能网联汽车实现自动驾驶的关键组成部分,包括导航电子地图、高级辅助驾驶地图和高精度地图。
高精度地图也称作自动驾驶地图、自主导航地图、高精地图、智能高精地图、智能汽车基础地图等。高精度地图的图层数量更多,图层内容更加精细,具有新的地图结构划分,包括可增量更新的七层自动驾驶地图模型、注重模型统一标准的通用化高精地图数据模型、结合地图学理论和应用需求的智能高精地图信息传输模型、四层一体化高精地图模型等多种类型。作为支撑自动驾驶的时空数据集,高精度地图具有高精度(高地图数据精度)、高丰富度(高地图数据类型)、高实时性(高地图更新频率)等特点,多用于定位、规划与感知模块,是智能网联汽车实现自动驾驶的全新地图数据范式。
本文浅析自动驾驶高精度地图全生命周期中的多维特征,介绍高精度地图深圳市试点实践经验,针对高精度地图发展现状提出建议。
2 高精度地图多维特征
自动驾驶高精度地图是地图科学与汽车工业力量融合产生的新对象,在学术研究、政府管理和产业应用等领域都引发热点思考,在其数据采集(感知数据类型多样)、地图构建(方法多元)、地图更新(众源更新技术多种)、地图应用(方式多类)、地图管理(地图审核流程智能、地图管理模式创新)等全生命周期流程中逐步呈现出一些典型特征。
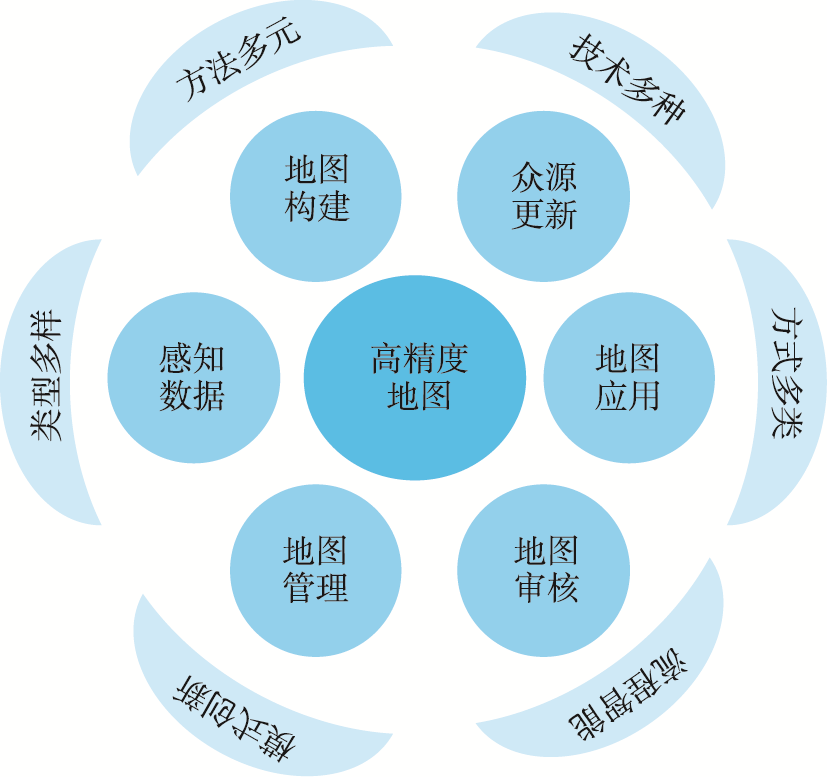
图1 高精度地图多维特征
2.1 感知数据类型
高精度地图的感知数据来源主要为车载传感器(摄像头、激光雷达、GNSS、IMU等)、无人机航拍影像和车联网接入的其他数据,数据类型包括视频/图片、遥感影像、点云和轨迹等。
摄像头有单/双目相机、深度相机、鱼眼相机等类型。激光雷达通过发射信号和反射信号的对比,构建点云图,实现目标距离的精准探测。GNSS通过定位接收器获取车辆绝对位置和姿态信息。IMU通过陀螺仪、加速度计的时间积分提供车辆相对位置和姿态信息。
2.2 地图构建方法
高精度地图构建方法分为移动测绘车或无人机航测生产等传统方法,遥感影像和轨迹数据生产等非传统方法两类,涉及多源异构数据融合、同时定位和地图构建(SLAM)、人工智能大模型、知识图谱等多个关键技术。
多源异构数据融合、SLAM技术、人工智能大模型和知识图谱是构建高精度地图的关键技术,能够充分利用各种传感器的优势,提高定位和地图构建的精度和鲁棒性。
2.3 众源更新技术
众源更新通过大规模要素提取,识别出道路变化情况,可实现增量更新,具有高效、成本低、覆盖度高的特点,能有效维持高精度地图的强现势性(即"高鲜度"),满足自动驾驶实时的高精度地图更新需求。
高精度地图众源更新是一个多阶段过程,涉及多种技术,典型的高精度地图众源更新技术路线包括众源数据采集、数据汇聚与预处理、数据处理与分析、成果数据入库和更新应用。
2.4 地图应用方式
在政策、技术和成本等多重因素驱动下,衍生出高精度地图应用于自动驾驶多类方案,可分为模块化和端到端应用方式。模块化应用方式通过数据采集与处理后,在自动驾驶感知、定位、预测、决策、规划、控制等模块单独使用高精度地图组合实现自动驾驶。
端到端应用方式将全部模块神经网络化,通过导航电子地图/高级辅助驾驶地图加动态感知数据,输入原始传感器数据,输出轨迹点或底层控制命令,基于数据驱动完成云端学习实现自动驾驶。
2.5 地图审核流程智能
高精度地图具有的视觉设计元素可有可无的特点,这给地图审核带来多个挑战,主要包括:数据格式不统一,审图标准不完善,审图周期需缩短等。
高精度地图数据关乎国家安全,其审核应区别于纸质地图和导航电子地图,需要进一步优化审核方法,建立自动化快速审核系统,发展在线智能审图技术,减轻审图专家工作量,提高审图效率,符合信息化发展要求,顺应高精度地图发展趋势。
2.6 地图管理模式创新
目前,我国高精度地图管理主要依据导航电子地图进行,导航电子地图的管理模式(送审、加密、限制表达等要求)不能充分适用于高精度地图实时采集、多源数据耦合动态更新等情境。
2023年3月自然资源部发布了《智能汽车基础地图标准体系建设指南(2023 版)》,涵括基础通用、生产更新、应用服务、质量检测和安全管理等5个部分,结合我国产业发展现状,对智能汽车基础地图数据采集、存储、传输相关标准的建设提出了原则性指导意见,为相关标准研制指明方向。
高精度地图数据集使用的传感器和特点
表1 高精度地图数据集使用的传感器和特点
| 数据集 | 主要传感器 | 特点 |
|---|---|---|
| KITTI | 灰度/彩色相机、激光雷达、GPS、IMU | 包含市区、乡村和高速公路等场景 |
| Cityscape | 双目相机 | 包含50个城市,春、秋、夏3个季节的街区场景 |
| Mapillary Vistas | 彩色相机 | 覆盖北美和南美,欧洲,非洲,亚洲和大洋洲 |
| Waymo Open | 彩色相机、激光雷达 | 覆盖25个城市,包含城市、郊区、白天/黑夜、黎明/黄昏、晴天和雨天 |
| nuScenes | 彩色相机、激光雷达、毫米波雷达、GPS、IMU | 覆盖城市、住宅区、郊区、工业区等场景,涵盖白天、黑夜、晴天、雨天、多云等天气 |
| ApolloScape | 激光扫描器、摄像头、IMU/GNSS | 使用专业采集车,激光雷达点云密度高,相机方位姿态准确度高 |
| Argoverse | 彩色相机、双目相机、激光雷达 | 包含290 km的带有几何形状和语义信息的高精度地图数据 |
| CADC | 彩色相机、激光雷达 | 全球首个针对寒冷环境的数据集 |
| CULane | 彩色相机 | 覆盖10个城市的公路、城市和乡村场景 |
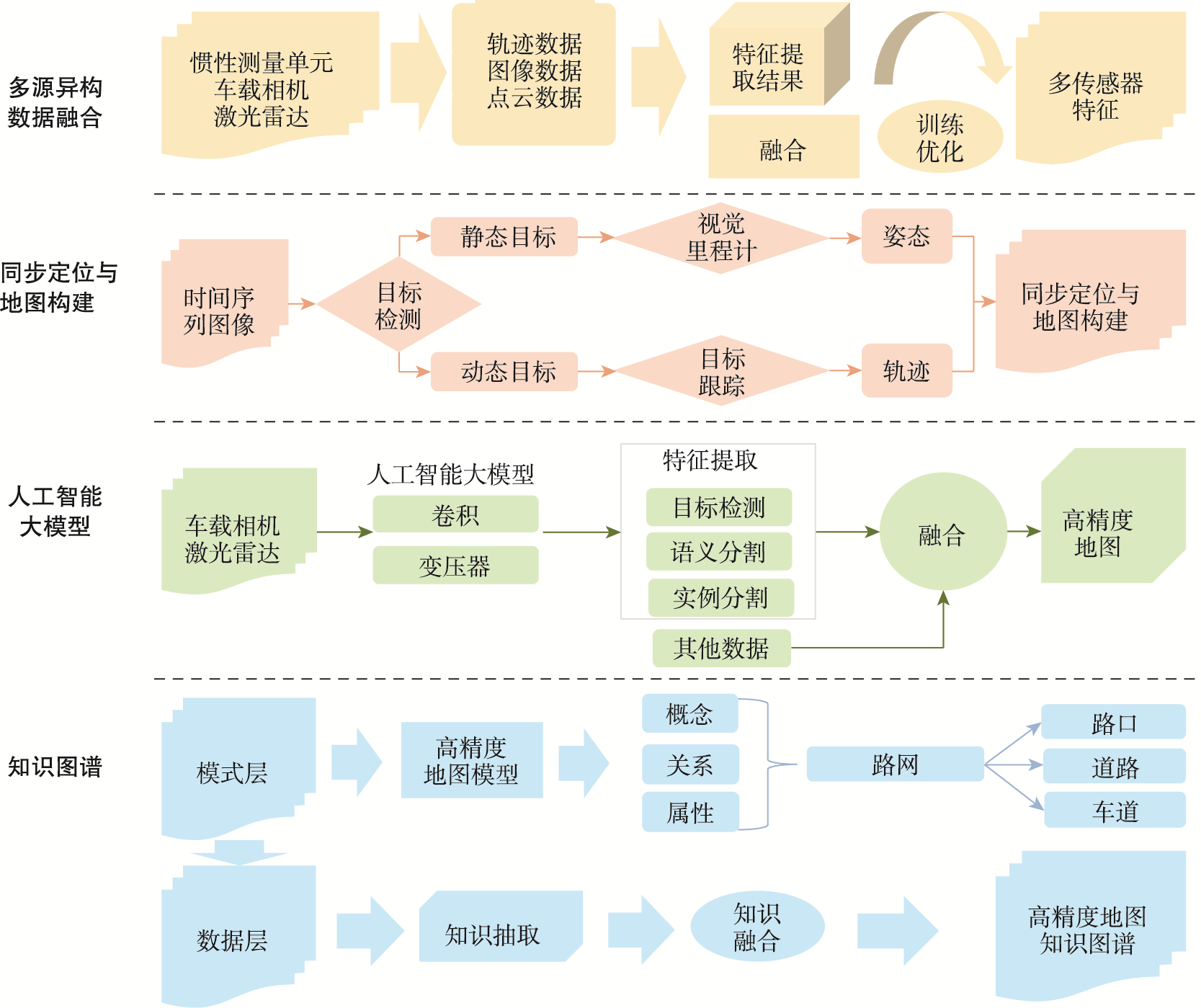
图2 构建高精度地图相关方法的技术流程
高精度地图众源更新技术路线

图3 高精度地图众源更新技术路线
主要步骤为:① 通过车载相机、激光雷达、GNSS、IMU等传感器以及交互通信设施,获取车端语义数据、车端轨迹数据及车端通信数据,路侧语义数据、路侧图像数据和路侧视频数据,第三方平台数据(交通数据和天气数据);② 对采集得到的众源数据,进行数据汇聚与预处理,包括解析、清洗、标准化和评价,统一数据类型及标准;③ 采用目标检测、图像分割、三维重建或多源融合等方法进行静态语义分析、交通路况分析和动态事件分析;④ 通过差分匹配完成静态地图更新,并将实时交通信息、动态交通事件入库;⑤ 对地图进行质量检查与合规处理,应用于自动驾驶系统辅助感知、高精定位、路径规划和辅助决策功能。
高精度地图模块化和端到端应用方式
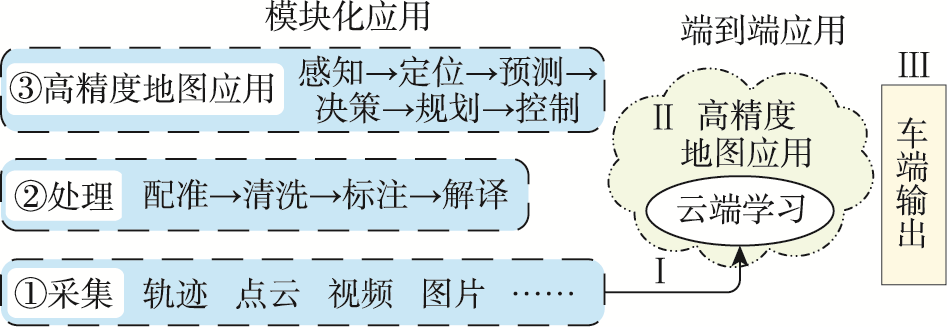
图4 高精度地图模块化和端到端应用方式
表2 高精度地图模块化和端到端应用方式的差异
| 应用方式 | 感知 | 定位 | 预测 | 规划、决策 | 控制 |
|---|---|---|---|---|---|
| 模块化应用 | 丰富先验信息 更全面 地图+传感器 |
厘米级精度 更精准 地图+传感器 |
动态信息 更安全 传感器 |
道路网络信息 更合理 地图+传感器 |
曲率及坡度 更平稳 传感器 |
| 端到端应用 | 导航电子地图/高级辅助驾驶地图、动态感知数据 实时动态、云端仿真测评性能强、在线计算效率高、无需人工标注数据 |
||||
高精度地图在线智能审核方法
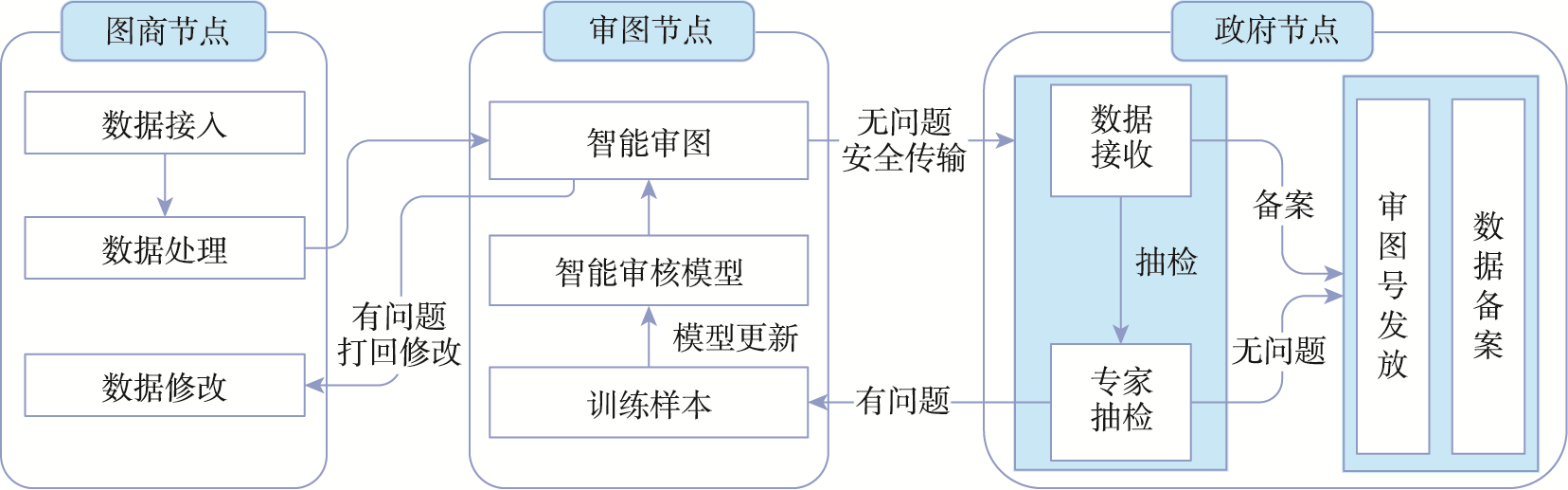
图5 高精度地图在线智能审核方法
在线智能审图方法能够简化审图流程,提升地图更新频率,提高地图审图的准确性和智能化水平,为自动驾驶应用提供更优质的地图数据支持。图商节点,包括数据接入和数据处理(标准化、分类分级、加密脱敏)由审图系统完成审图;审图节点,利用部署在资质方的子系统进行智能审图,审图无问题允许进行安全传输,有问题则打回修改;政府节点,接收到审图系统发送的数据,进行专家抽检确认后,发放审图号,完成数据备案。
智能汽车基础地图标准体系
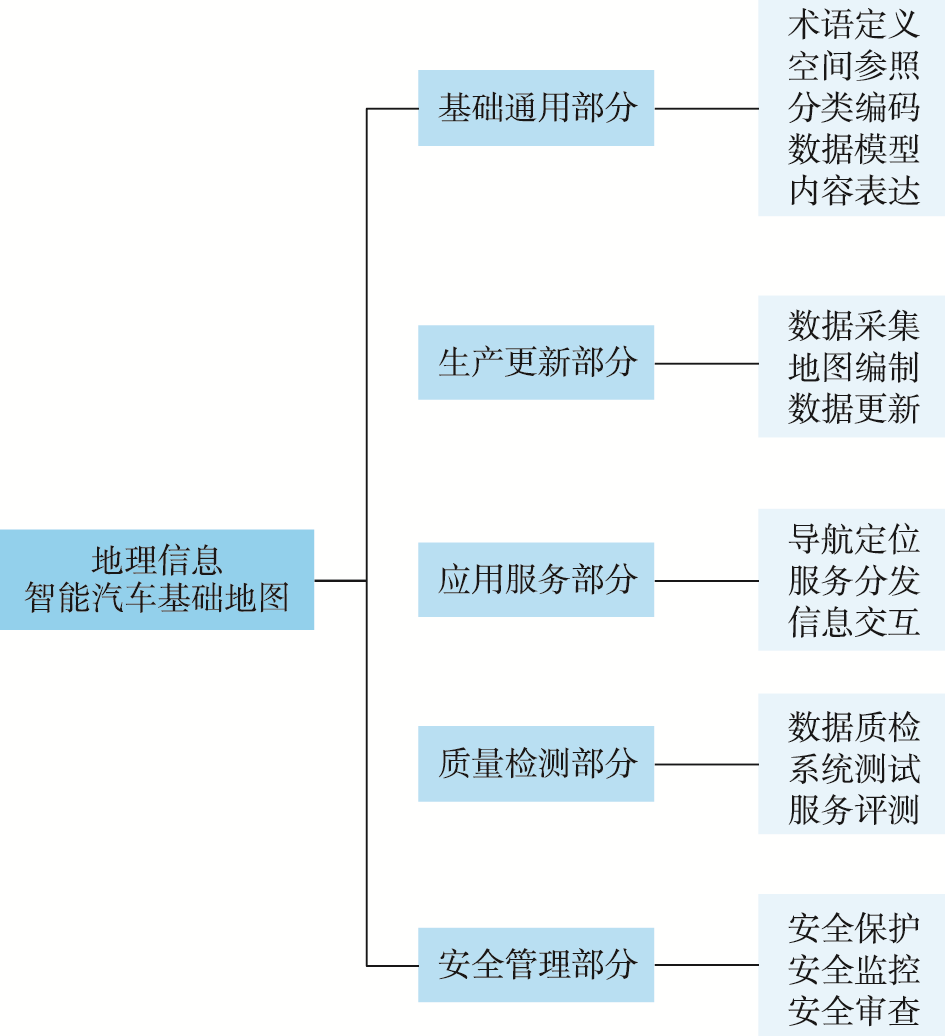
图6 智能汽车基础地图标准体系框架图
3 政企学研结合:以深圳市试点实践为例
为落实国务院关于开展营商环境创新试点工作的意见,在确保安全的前提下,探索高精度地图面向智能网联汽车开放使用,自然资源部在北京、上海、广州、深圳、杭州、重庆6个城市开展智能网联汽车高精度地图应用试点。深圳市作为试点城市之一,出台了国内首部关于智能网联汽车管理的地方法规《深圳经济特区智能网联汽车管理条例》,以打造全国首个面向智能网联汽车全城开放的示范城市为目标推进试点工作。
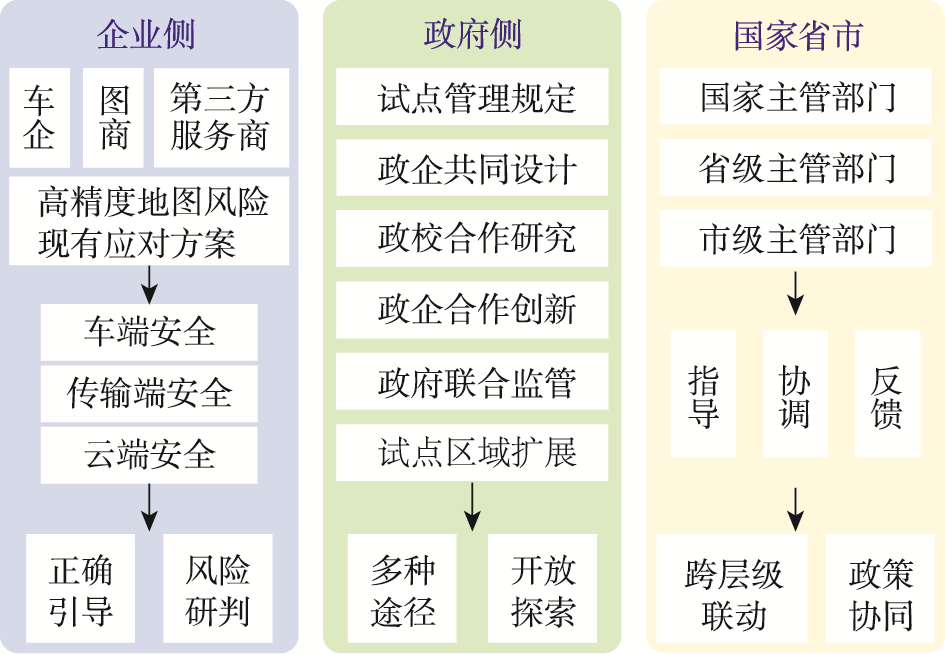
图7 高精度地图深圳市试点实践经验
深圳市试点实践经验
企业侧
优化企业营商环境,吸引高端创新要素,为企业提供广阔的发展机遇,形成覆盖智能网联汽车产业链各个环节的产业集群。参与高精度地图试点的车企、图商和第三方服务商等企业分析测绘地理信息数据采集、存储、传输、处理和分发过程中的潜在风险,研究车端、传输端和云端的安全合规措施。
政府侧
联合企业、高校和研究机构,面向高精度地图发展的差异化诉求,以政企学研共同设计、企业技术实践的方式,探索侧重点不同、业界可运行、政府可监管的试点工作。通过场景触发和即采即抛等技术保障车端数据安全,通过专用网络和国密加密等技术保障传输端数据安全。
国家省市
国家、省级、市级主管部门保持联动,制定清晰的沟通和协作流程,积极响应企业多层次、多样性需求,及时提出试点过程中出现的跨层级问题并寻求指导建议,为高精度地图试点工作的顺利推进提供坚实支持。
目前高精度地图相关建设主体在安全合规的发展诉求和技术能力等方面存在差异,这导致安全监管要求重心所在有别。下一步,深圳市将面向智能网联汽车测绘地理信息相关数据多层级潜在风险,充分考虑企业差异化诉求,设计多元化服务方案,从测绘资质、采集安全、存储安全、地图审核、保密处理、道路测试等方面引导企业合规建设,推动企业执行部省关于维护测绘地理信息安全的要求。
4 总结与展望
地图演变从最初的纸张形式逐渐发展为视频、动画等新媒体形式,到如今步入高精度地图应用时代,既反映了技术的不断创新,也呈现出地图在信息表达和多类应用的显著进步。本文浅析了高精度地图感知数据类型多样、地图构建方法多源、众源更新技术多种、地图应用方式多类、地图审核流程智能、地图管理模式创新等多维特征,并介绍了深圳市试点实践经验,确信高精度地图未来空间十分广阔,将成为地图学或地理信息科学十分活跃的学科增长点之一。高精度地图当下还有许多问题有待研究。
认知差异问题
当前工业界、学术界及政府管理部门对自动驾驶高精度地图认知存在差异。在其内涵及外延未形成共识情况下,工业界专注于自家高精度地图技术闭环,各项关键技术未能高效互通,学术界的贡献未必能对工业界提供高效率指导,各企业高精度地图差异化的格式、标准及应用也为政府管理部门的高效管理带来阻碍。需加快推进相关国家标准建设,为相关从业人员提供有效指导。
安全风险问题
高精度地图数据全生命周期存在多维安全风险。在采集环节,建议通过场景触发机制,按需采集数据,脱敏处理、点云抽稀、偏转插件、即采即抛等技术和策略保障车端数据安全;在传输环节,建议通过专用网络和基于国产密码的认证加密技术,确保数据传输安全;在存储环节,建议通过建立高精度地图专属云,采用数据分类隔离、分级防护、脱敏加密等数据管理策略,防止越权访问、泄露、篡改等,发布前完成地图审核、脱敏加密和发布审计等数据发布策略,保障数据存储安全。
平台建设问题
需尽快推进国家级高精度地图平台建设。高精度地图数据量大,覆盖范围广,其采集与维护耗费巨额成本,需建设国家级高精度地图平台,解决高精度地图数据确权问题,将多家企业相关数据进行统一管理或提供服务,节省成本并降低其潜在安全风险。
应用拓展问题
除自动驾驶外,高精度地图未来还将广泛应用于物业、医疗、智慧城市等领域。结合5G、云计算、人工智能等技术,提升各行各业信息化程度,比如为智慧城市建设提供精准的城市规划参考依据,为住宅区、学校等场所提供精确的物流服务等,加速城市数字化转型,满足新时代对地理信息的日益增长需求。
引用格式
杜清运,况路路,任福,等.自动驾驶高精度地图特征分析及发展展望[J].地球信息科学学报,2024,26(1):15-24. [ Du Q Y, Kuang L L, Ren F, et al. Feature analysis and development prospect of high definition maps for autonomous driving[J]. Journal of Geo-information Science, 2024,26(1):15-24. ] DOI:10.12082/dqxxkx.2024.240054
以上内容由AI自动生成,内容仅供参考。对于因使用本网站以上内容产生的相关后果,本网站不承担任何商业和法律责任。