摘要
实现复杂场景下地块级苹果园的精准制图,是中国苹果产业精细化管理面临的迫切需求。然而,传统的地块级分类制图框架在处理小农经营区内的大量细碎地块时,可靠性大幅度降低。本文提出一种适用于复杂场景下小农经营区的地块级苹果园模块化制图方法框架。① 基于模拟人类对目标场景视觉感知的分层策略,从深秋季的单幅超高空间分辨率(Very High Resolution, VHR)影像中提取冗余的候选地块;② 利用非对称瓶颈网络(Depth-wise Asymmetric Bottleneck Network, DABNet)模型与长短期记忆(Long Short-Term Memory, LSTM)模型,分别从VHR影像与时间序列影像中提取苹果园的空间特征像素与时序特征像素。然后,构建元特征描述特征像素在候选地块中的分布情况,与地块的内在特征共同组成苹果园地块的分类特征;③ 使用随机森林(Random Forest, RF)将候选地块分类为苹果园地块和非苹果园地块。以山东省栖霞市西城镇为研究区,从43 238个候选地块中提取出30 292个苹果园地块,分类总体精度达到92.7%。利用RF算法自带的平均精度减少指标(Mean Decrease in Accuracy, MDA)对17种分类子特征进行特征重要性分析,证明本文提出的元特征比传统人工设计特征具有更强的信息抽象与特征表达能力。该框架成功实现场景复杂的小农经营区地块级苹果园制图,可推进精准果园农业的发展。
1 引言
中国是世界上最大的苹果生产与消费国,苹果产业是中国现代农业经济发展中的重要组成部分。山东省栖霞市位于北纬37°的苹果种植黄金带上,是我国苹果的主产区之一,由于其内部果树种植区的地形复杂,山区、丘陵等地域零散分布,严重的耕地破碎化导致规模化农业发展缓慢,目前仍以小农经营模式为主。在农业生产经营与管理中,普遍将具有同一属性的完整封闭的农田——地块,作为研究的基础。因此,在小农经营区获得精准的地块级苹果园分布制图结果,对我国苹果产业的发展具有重要意义。
复杂场景下果园的提取在国内外的相关研究普遍较少,当前研究多以基于高时间分辨率遥感数据的像素级分类为主,根据光谱、物候与纹理等特征进行园地提取。然而,高时间分辨率影像普遍空间分辨率较低且复杂场景下果园地块较为破碎,很难准确地将果园与林地等干扰地物区分开。同时,像素级分类不可避免地会出现"椒盐"现象,给果园种植面积核算、精确管理等带来很大不确定性,难以满足精准果园农业的需求。
随着VHR数据时代的到来,遥感影像可以更精细地体现地块的位置形态、纹理边界等特征信息,地块级作物制图得以迅速发展,使得地块级苹果园制图成为可能。当前地块级作物制图研究大部分采用两步走策略:① 利用具有较高空间分辨率的单幅VHR影像提取地块;② 使用空间分辨率相对较低的时间序列影像,如Sentinel-2、GF-1等,提取时序特征以识别地块类型。然而,该方法在场景复杂的小农经营模式下的园地内表现不佳,主要有以下2个问题:① 复杂的地形场景使得苹果园地块存在明显的空间异质性,不同地形区域的苹果园地块视觉特征差异化明显,导致地块提取难度较大;② 小农经营模式下出现大量细碎狭窄的地块,尤其在丘陵区的梯田果园宽度甚至小于2 m(只有一行苹果树种植),远小于常用的时间序列光学影像的空间分辨率,使得仅依赖时序特征进行地块分类的精度较低。
本文从2个问题分别入手。对于第一个问题,当前利用深度学习模型代替传统分割方式从VHR影像中提取地块的研究越来越多,但这些研究大多着力于通过改进模型结构一次性提取所有地块,导致模型结构变复杂却降低了提取效率。Sun等提出了一种层次结构的框架,结合现有的成熟模型模拟人类对目标场景的视觉感知,对视觉内容进行推导、预测,从而准确地从复杂场景中提取地块。该框架已成功应用于多个地块提取任务中,虽然各个任务使用的深度学习模型有所不同,但层次约束的思想始终贯穿了地块提取的全过程。因此,可以基于分区分层思想设计地块提取策略,从而提高苹果园候选地块的提取精度。
对于第二个问题,目前有很多时空融合模型理论上可以将单幅VHR影像与时间序列影像进行融合,但这些模型普遍存在几何误差较大与效率低下的问题。Liu等使用多源VHR影像成功在地块尺度上量化了洪涝灾害对冬小麦的影响,表明VHR影像也具有识别作物的能力。但由于VHR影像重访周期较长,缺乏对作物时序特征的描述,导致很多空间特征相似的作物在分类中出现混淆。通过时空协同的方式将空间与时序特征相结合进行地块分类,将有效地提高复杂场景下小农经营内苹果园的分类精度。同时,目前已有很多人工设计的时空特征,但普遍存在鲁棒性低,泛化能力弱的缺点。而深度学习模型可以通过深度神经网络自动学习高级特征,并且已广泛应用于作物分类任务中。因此,可以利用深度学习模型自适应地提取苹果园地块的空间与时序特征。
本文旨在解决传统的像素级果园提取方法与地块级作物制图框架在地块破碎化严重的苹果园地区表现不佳的问题,提出了一种新型模块化的地块级苹果园制图方法框架。首先,通过基于分区分层思想的深度学习感知模型对VHR影像中呈现的多种视觉特征的苹果园候选地块进行提取。然后,将DABNet与LSTM模型作为特征提取器,提取符合苹果园地块的空间与时序特征的特征像素,并构建描述特征像素在地块内部分布情况的元特征替代传统的人工设计特征,利用RF模型将候选地块分类为苹果园地块和非苹果园地块。实现了复杂场景下小农经营区内地块级苹果园的分类制图,为其他作物类型的地块级制图提供参考。
2 研究区概况与数据来源
2.1 研究区概况
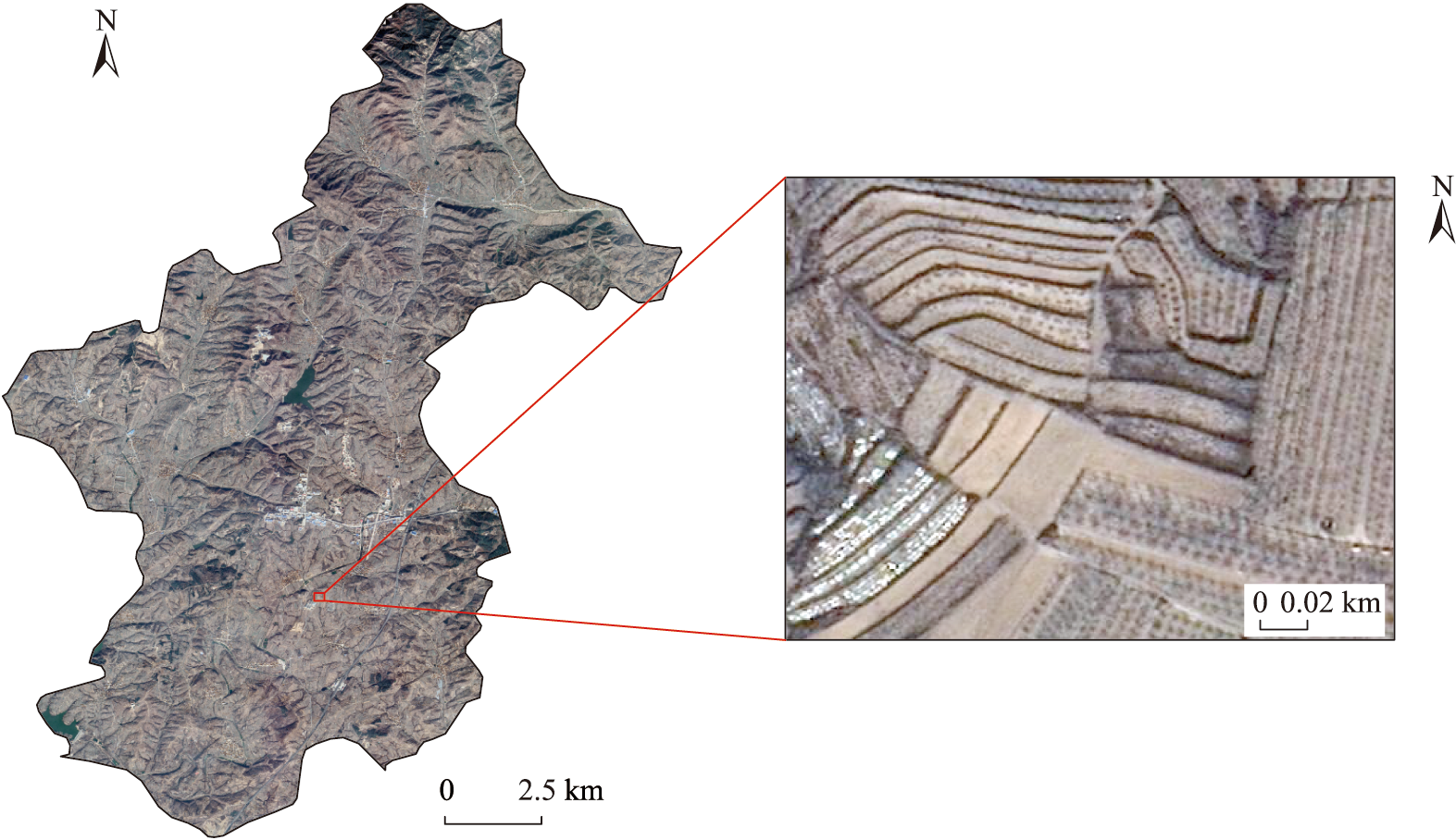
本文研究区位于山东省栖霞市西城镇(图1),120°40'16"E—120°49'2"E,37°14'45"N—37°25'31"N,地处苹果黄金生长带,行政区域面积90.1 km2。该地区地势北高南低,自艾山前麓向南一狭长丘陵贯通全境,最高点雷山,海拔500 m;最低点海拔141 m;气候温暖湿润,夏无酷暑,冬无严寒,属于典型的亚热带大陆季风气候。研究区年平均气温18.9 ℃,年累计光照时间达2 690 h,阳光照射时间充足,秋季昼夜温差大,土壤条件适宜,非常适合苹果种植。
西城镇的苹果种植模式具有以下3个特点:
2.2 数据信息
研究使用的遥感数据包括Google Earth影像与Sentinel-2影像。其中,采集于2019年11月的0.6 m空间分辨率的Google Earth影像作为VHR影像。采集于2019年1—6月的Sentinel-2影像作为时间序列影像,获取数据集的具体时间如表1所示。同时,实地考察了713处包含不同地形的苹果种植区,并对种植区内部的苹果园地块进行采样,为特征像素提取与地块分类提供样本。
| 获取时间 | 儒略日/d | 获取时间 | 儒略日/d |
|---|---|---|---|
| 2019-01-02 | 2 | 2019-08-22 | 234 |
| 2019-01-22 | 22 | 2019-09-14 | 257 |
| 2019-02-16 | 47 | 2019-09-24 | 267 |
| 2019-03-15 | 74 | 2019-10-19 | 292 |
| 2019-04-04 | 94 | 2019-10-31 | 304 |
| 2019-04-17 | 107 | 2019-11-08 | 312 |
| 2019-05-02 | 122 | 2019-11-18 | 322 |
| 2019-05-14 | 134 | 2019-12-03 | 337 |
| 2019-06-18 | 169 | 2019-12-28 | 362 |
由于本研究目标为精准的地块级苹果园提取。因此识别对象为苹果园与非苹果园,其他作物类型与地物类型统一归为非苹果园类。
3 研究方法
3.1 方法框架
本研究提出了一个适用于复杂场景下的小农经营区内地块级苹果园模块化制图方法框架。框架流程如图2所示,分为独立的3个模块。
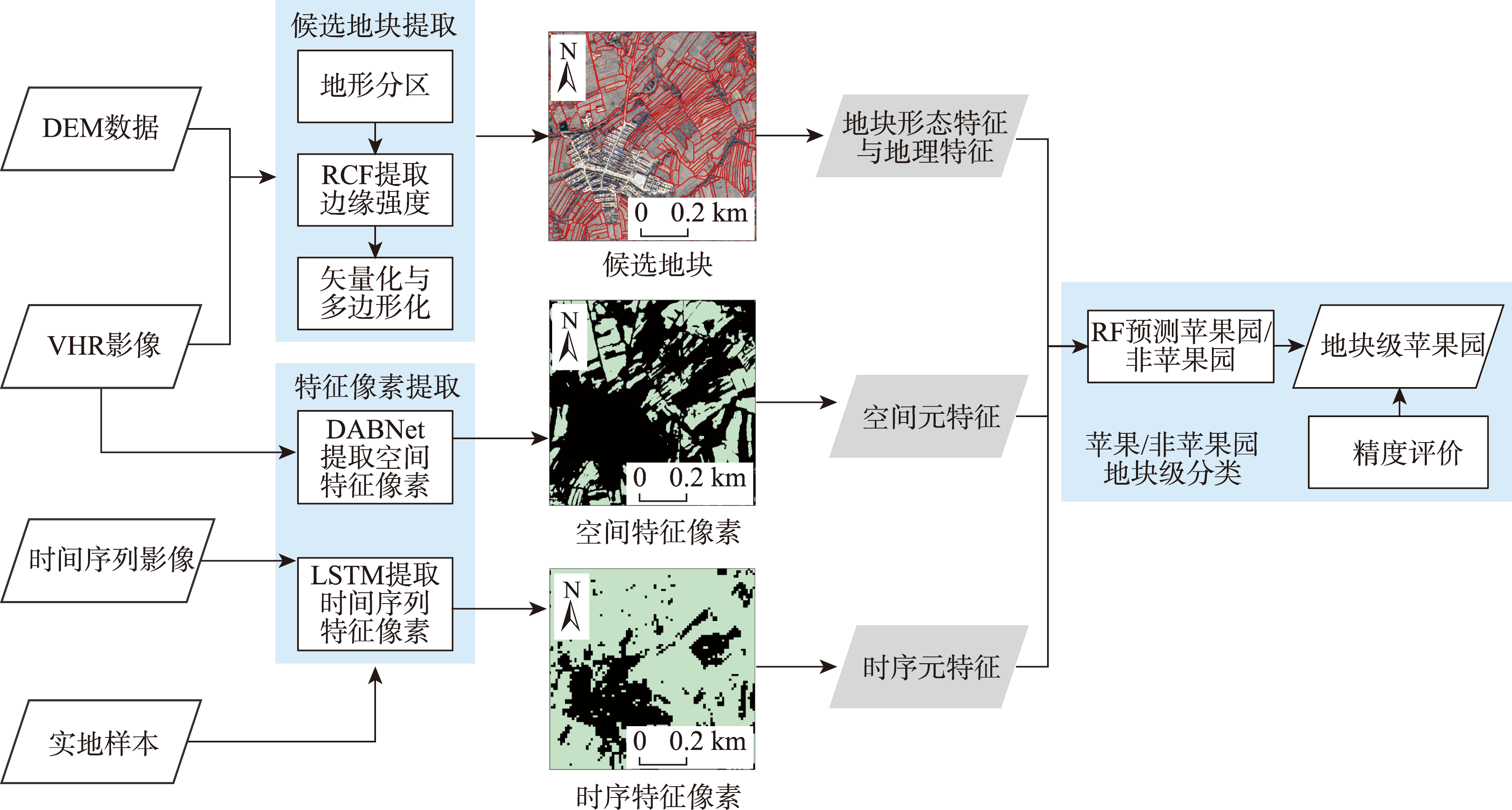
(1)候选地块的分层提取,包括研究区地形分区与不同地形区的地块提取。
(2)特征像素提取,包括基于DABNet的空间特征像素提取与基于LSTM模型的时序特征像素提取。
(3)地块级果园/非果园分类,基于地块元特征与内在特征构建特征序列,利用RF模型将候选地块分类为苹果/非苹果园地块,并对最终的地块级苹果园制图结果进行精度评估。
本文采用Windows10操作系统和PyTorch深度学习框架,利用Python语言实现该方法框架的开发与应用,CUDA版本为10.1,GPU采用NVIDIA GeForce TITAN X(pascal)。
3.2 候选地块的分区分层提取
研究区地形复杂,包括山地、丘陵、平原区域,导致苹果园地块存在较大视觉特征差异。因此,需要对研究区进行划分,使得分区内部的苹果园具有相似的视觉特征。表2显示了本研究中不同地形分区内苹果园地块的代表性样本,包括平原地区的平原果园、育苗果园,丘陵区的梯田果园,以及山区的林地果园。同时,由于在苹果树种植过程中普遍利用反光膜反射阳光给苹果着色,导致一些苹果园地块呈现出独特的白色纹理,这类苹果园地块为反射膜果园,且不受地形约束。
| 地形区 | 苹果园类型 | 特征 |
|---|---|---|
| 平原地区 | 平原果园 | 边界相对清晰,颗粒状纹理,空间分布整齐。 |
| 平原地区 | 育苗果园 | 边界相对清晰,条状纹理紧凑,空间分布整齐。 |
| 丘陵地区 | 梯田果园 | 边界粗糙而清晰,纹理颗粒状,空间分布密集。 |
| 山区 | 林地果园 | 内部边界类似于梯田果园,但外部边界是模糊的,并与林地混合。 |
| 平原地区、丘陵地区、山区 | 反光膜果园 | 独特的内部白色纹理,存在于所有地形。 |
候选地块的提取可以看作是一项实例分割任务,由于VHR影像包含丰富的空间信息,传统的地块级作物分类制图多采用VHR影像直接进行地块提取。但苹果园地块具有较为复杂的视觉特征,使用单一实例分割模型很难一次性提取所有的候选地块。因此,本研究设计了一种基于分区分层思想的地块提取策略,首先通过DEM数据获得高程与坡度,将研究区分为平原地区、丘陵地区与山区。然后,依据不同区域内苹果园地块边界所呈现的视觉特征分别构建不同的候选地块提取模型,提取出满足苹果园边界视觉特征的所有地块。
更丰富特征的边缘检测(Richer Convolutional Features for edge detection, RCF)模型通过使用多尺度边缘特征,提高了预测时对网络特征的利用率,实现了端到端边缘检测,是目前性能最好的边缘检测算法之一,可以提取地块中清晰的边缘。因此,本框架对于有明确边界的果园类型,包括平原果园、育苗果园、梯田果园与反光膜果园,构建RCF模型分别进行地块提取。对于林地果园这类外部边缘模糊的果园,只利用RCF模型提取其清晰的内部边界,外部边界通过后期人工编辑进行补充。在RCF模型训练过程中设置样本大小为224像素×224像素,并通过随机旋转与翻转等方式增加训练样本数量,初始学习率设置为0.001,批大小为32,共训练3 000个epoch,训练与验证集比例为4:1。
3.3 特征像素提取
本研究提出的分类框架引入了特征像素的概念,即符合苹果园某些抽象特征的像素。特征像素的提取过程与像素级苹果园分类过程相同,但特征像素不作为分类结果,而是作为苹果园的抽象特征辅助地块级苹果园分类。本研究采用两种深度学习模型从VHR影像和时间序列影像分别提取苹果园的空间与时序特征像素。
3.3.1 基于DABNet的空间特征像素提取
基于卷积神经网络(Convolutional Neural Network, CNN)的模型对VHR影像的空间特征提取能力强,且考虑到西城苹果园纹理特征明显,因此本研究采用基于CNN的高效轻量化的非对称瓶颈网络(Depth-wise Asymmetric Bottleneck Network, DABNet)模型从VHR影像中提取苹果园空间特征像素。
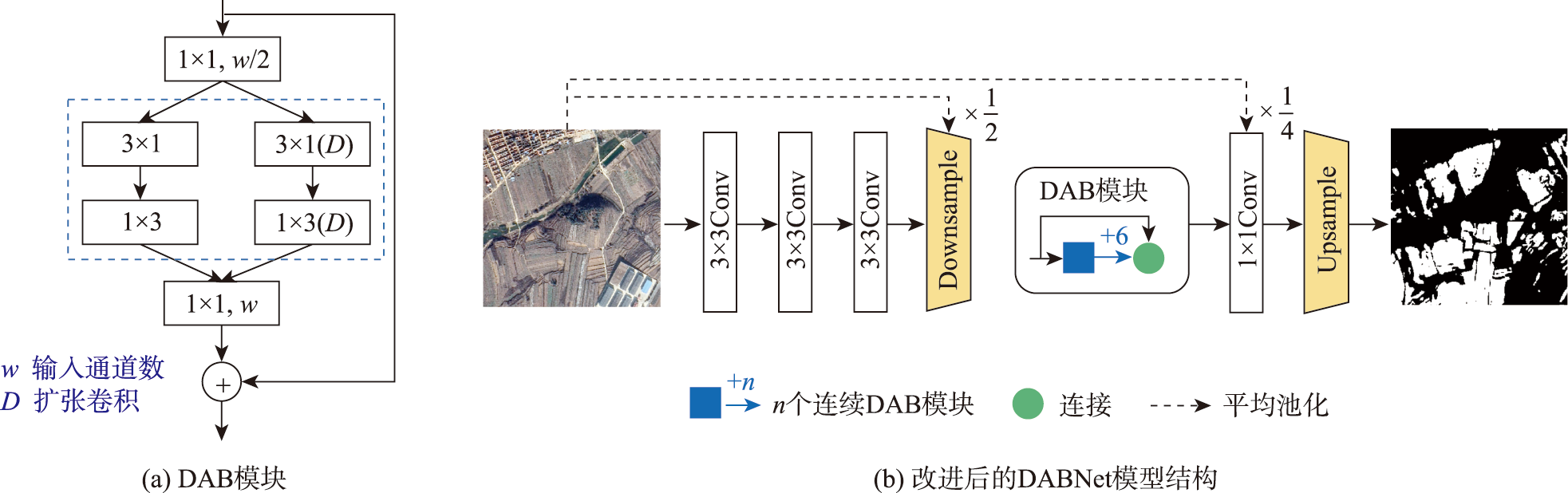
DABNet模型最初是为实时语义分割而设计的,网络结构较为简单。DABNet设计了一种新的深度非对称瓶颈(DAB)模块来提取特征(图3(a)),它利用膨胀卷积提供更大的接受域,使用深度可分离卷积降低计算量。由于苹果园具有小而密集的独特点状纹理,当原始模型向下采样到1/8时,丢失了苹果园主要的空间特征。因此,本研究在原始的DABNet上删除了一个DAB模块和一个下采样操作,改进后的DABNet模型结构如图3(b)所示。
提取苹果园空间特征像素后,根据其在候选地块内的分布情况,计算每个候选地块的空间元特征。
DABNet模型训练参数设置如下:初始学习率设置为0.001,并利用自适应Adam优化器自动调整学习率,样本大小为1 024像素×1 024像素,共训练3 000个epoch,批大小设置为32,其余参数默认。
3.3.2 基于LSTM的时序特征像素提取
长短期记忆(Long Short-Term Memory, LSTM)模型是循环神经网络(Recurrent Neural Networks, RNN)的一种特殊类型,可以学习长期依赖信息,体现数据的时间序列变化的特点。本研究利用LSTM模型从时间序列影像中提取苹果园的时序特征像素。图4显示了研究中使用的LSTM的网络结构,它由两层32个隐藏单元组成。
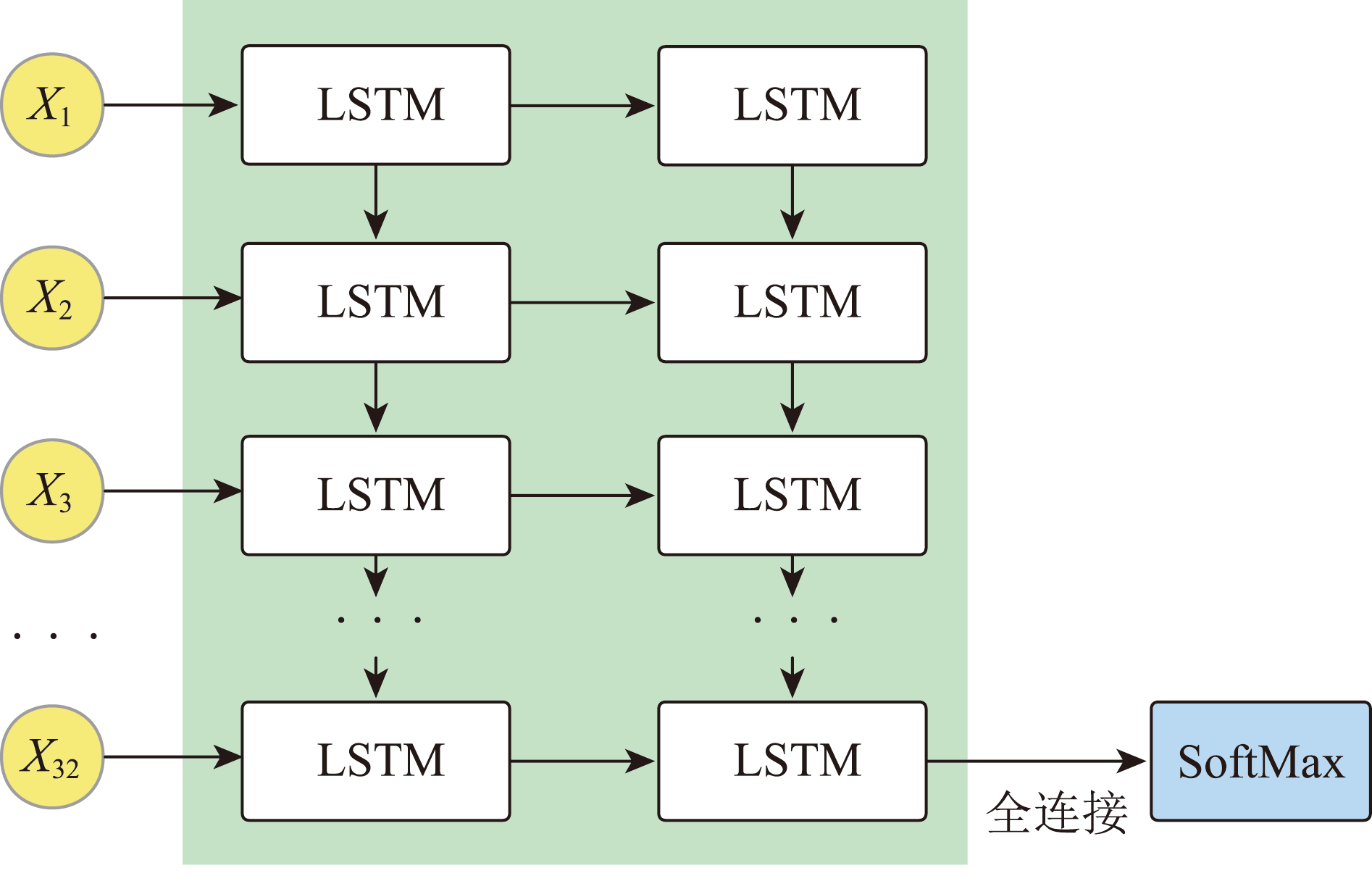
LSTM模型已广泛地应用在基于时间序列的作物分类研究中,形成了一个成熟且完善的处理过程。首先,对Sentinel-2影像进行预处理,包括辐射校正和大气校正,并建立每个像素的归一化植被指数(NDVI)时间序列。NDVI的公式为:
NDVI = (ρNIR - ρred) / (ρNIR + ρred)
式中:ρNIR代表近红外波段反射率;ρred代表红波段反射率。然后,利用LSTM模型提取苹果园的时序特征像素,学习率为0.001,共训练2 000次,批大小为32。并将时序特征像素重新采样到与VHR图像相同的空间分辨率,计算每一个候选地块基于时序特征像素分布的元特征。
3.4 基于随机森林的地块分类
利用随机森林(Random Forest, RF)模型将候选地块分为苹果/非苹果园地块。RF是基于Bagging集成学习理论和随机子空间方法提出的若干个决策树构成的集成学习方法。当输入分类对象特征后,最终结果由众多决策树以投票的方式输出结果。本研究基于候选地块、空间与时序特征像素的提取结果,自主编写代码得到苹果园地块分类特征,包括地块内在特征(Parcel Intrinsic Features, PIF)、空间元特征(Spacial Meta Features, SMF)以及时序元特征(Time Series Meta Features, TMF),如表3所示。其中,PIF为地块的内在特征,描述地块本身的形态与地理位置特征,本研究设计了的9种子特征组成PIF。SMF描述空间特征像素在地块中的分布,是真实地表的空间信息的抽象。TMF描述了时序特征像素在地块中的分布,是真实地表的时序信息的抽象。
| 类别1 | 类别2 | 特征名称 | 特征描述 |
|---|---|---|---|
| 地块内在特征(PIF) | 形态特征 | 面积 | - |
| 边界长度 | 地块的外边缘长度(不包括内岛) | ||
| 长度 | 地块包围盒的长边 | ||
| 宽度 | 地块包围盒的短边 | ||
| 长度/宽度 | L/W | ||
| 圆度 | 4 × π × A / BL2 | ||
| 形状指数 | BL / (4 × √A) | ||
| 地理特征 | 海拔 | - | |
| 坡度 | - | ||
| 元特征 | 空间元特征(SMF) | 覆盖度-S | 覆盖度 = AREA(apple orchard)/ AREA(parcel) |
| 偏离率-S | 偏离率 = ∑i=1n wi × DISTANCE(cp, cIFD)/ r | ||
| MIDF-S | MIDF = MAX(AREA(IFD))/ SUM(AREA(IFD)) | ||
| IDN-S | IDN = NUMBER(IFD) | ||
| 时序元特征(TMF) | 覆盖度-T | 公式同上 | |
| 偏离率-T | |||
| MIDF-T | |||
| IDN-T |
本研究基于特征像素设计了4种子特征组成空间与时序元特征。① 覆盖度,描述地块内特征像素所占比例,覆盖度的值越大,说明地块中符合苹果园的特征像素越多;② 偏离率,描述地块内独立特征像素分布的偏离程度,其中独立特征像素(Independent F-pixels Distribution, IFD)是指地块内连通的特征像素集合;③ 最大独立分布分数(Maximum Independent Distribution Fraction, MIDF)是最大IFD的比例;④ 独立分布数(Independent Distribution Number, IDN)是IFD数量,MIDF与IDN相结合能够描述IFD的离散程度。
在基于RF的地块分类过程中,为检测不同特征组合对地块级苹果园提取的精度影响,本研究构建了7种不同的特征组合,并将其导入RF算法生成7个分类模型,前3个模型依次仅使用PIF、SMF和TMF作为分类特征;第2—6个模型依次使用PIF+SMF、PIF+TMF和SMF+TMF作为RF分类特征组合;最后一个模型使用全部特征变量,即构成PIF+SMF+TMF特征组合的RF分类模型。研究将对比以上分类模型的精度,以评价地块内在特征、空间元特征与时序元特征对地块级苹果园提取的贡献。最后,选取最优特征组合,得到苹果园地块的最终分类结果。
4 结果与分析
4.1 候选地块提取结果
根据2.2节中提到的分区分层的候选地块提取策略,建立多个RCF模型提取苹果园边界。苹果园的候选地块为满足苹果园边界视觉特征的所有地块,最终在研究区内提取到43 238个候选地块,其中平原地区19 317个、丘陵地区16 949个、山区6 972个。
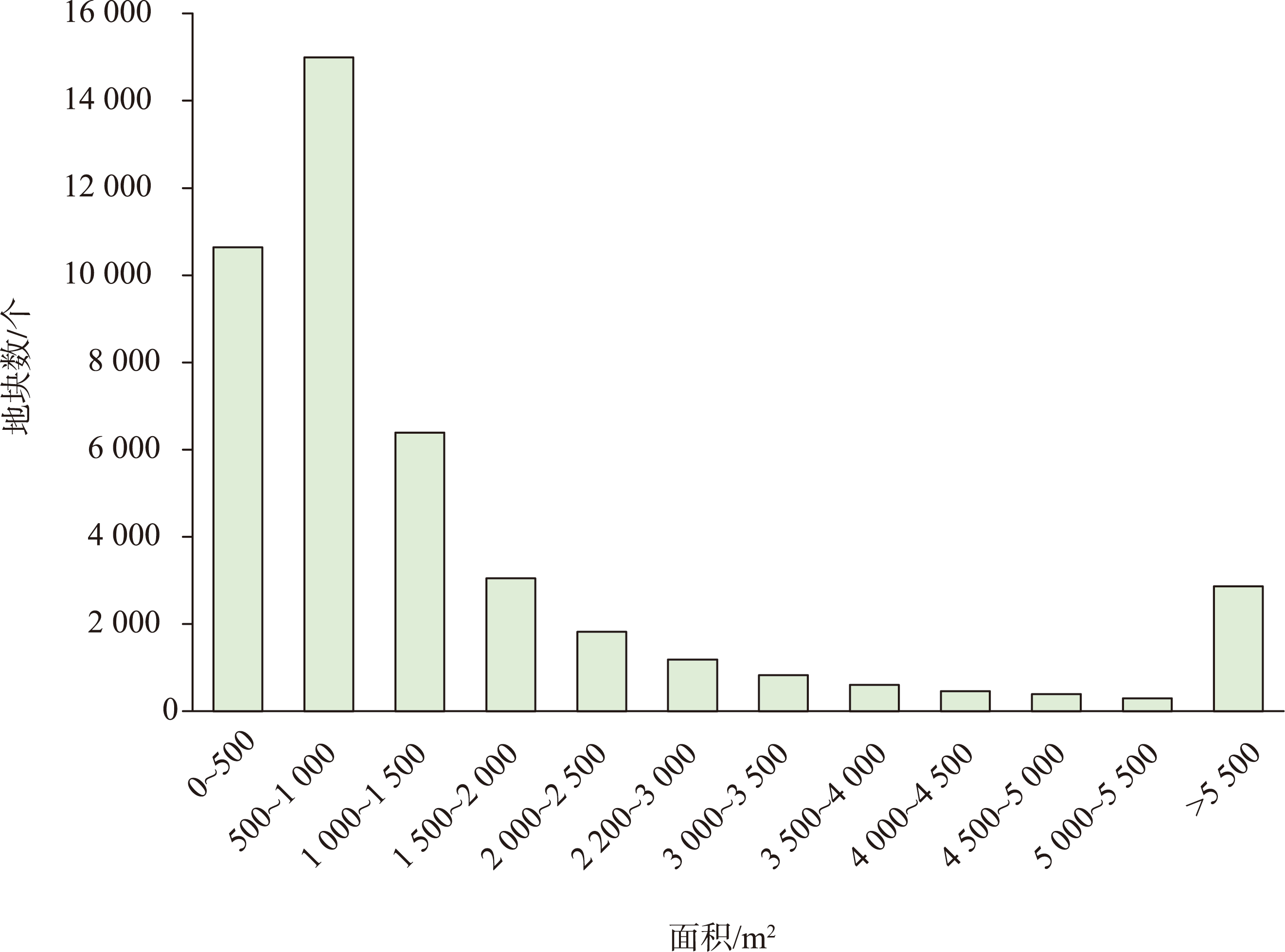
候选地块的面积分布情况如图5所示,其中平均面积为2025.56 m2,面积中位数为821.19 m2,且24.4%的候选地块面积小于500 m2。主要原因是研究区内有大量的梯田果园,由于梯田中常出现苹果树与花生、大豆等的混种的情况,所以梯田的每一断面都视为独立的地块,导致出现大量小面积的地块。
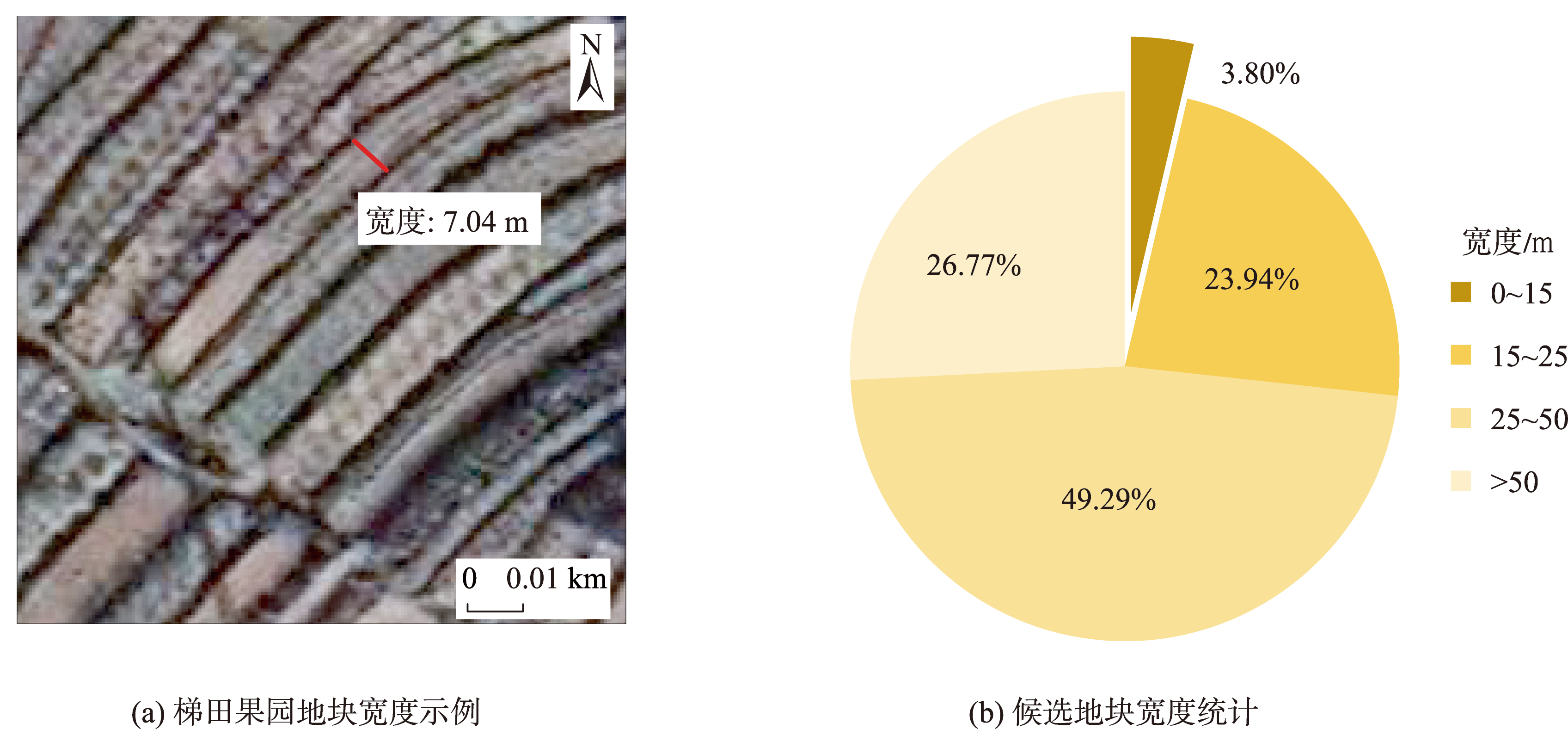
从图6(b)中,可以看出3.80%的候选地块宽度小于15 m,23.94%的候选地块宽度小于25 m。因此,研究区内候选地块的形态特征以面积较小、形状狭长为主,在获取时序特征的数据源空间分辨率较低的情况下,这种形态特征大大影响了缺乏空间特征的分类模型的有效性。
4.2 特征像素提取结果
基于VHR影像与时间序列影像分别获得的2种不同特征像素,是真实地表的空间信息和时序信息的抽象表达。利用特征像素在候选地块中的分布情况计算的元特征,是地块级苹果园提取的重要依据。
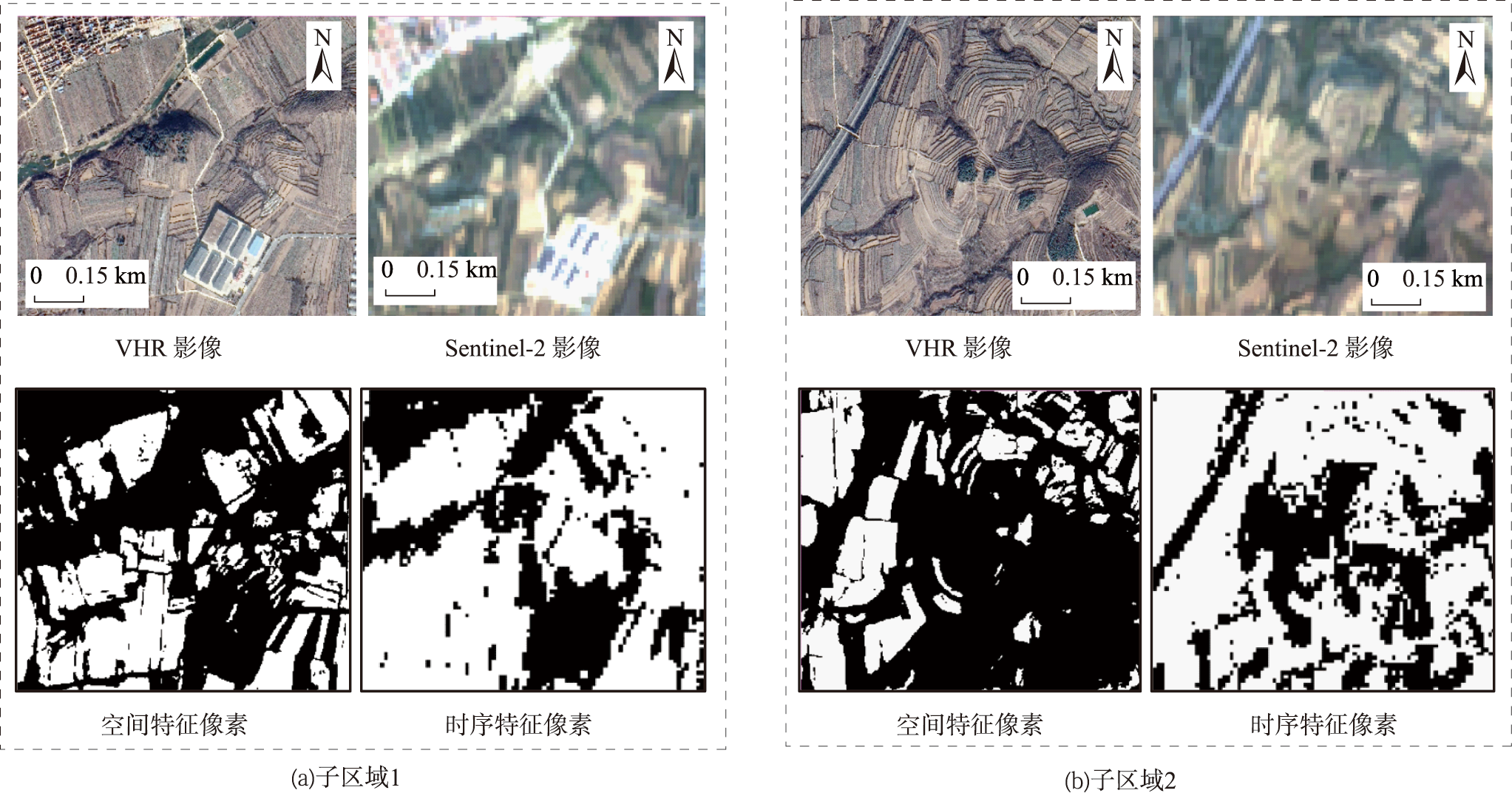
在完成影像的坐标系统的统一后,进行特征提取。图7展示了同一区域特征像素提取结果的差异,其中基于VHR影像提取特征像素的OA为92.8%,基于时间序列影像提取特征像素的OA为83.1%。从对应的特征像素提取结果,可看出空间特征像素分布要比时序特征像素分布精细的多。出现这种情况的可能原因有3个:① 苹果园具有非常明显的空间特征,尤其是纹理特征;② 在VHR影像中进行的语义分割比在时间序列影像中进行的逐个像素的辨别具有更大的感受域;③ 时间序列影像的空间分辨率为10 m,比VHR图像的0.6 m空间分辨率低得多,导致了严重的混合像元问题。因此,尽管植被分类通常使用时间序列影像,但较低的空间分辨率从根本上限制了它在地块破碎的小农经营区的有效性,而VHR影像在小农经营区作物分类中显示出极好的潜力。
然而,不论是基于空间特征像素还是时序特征像素的分布结果,都不可避免地存在椒盐噪声。在本框架中,各特征像素仅用来表示真实地表的一部分信息,最终用于构建地块的元特征。
4.3 地块级苹果园提取结果
在获得候选地块和2种特征像素分布结果后,使用RF模型进行最终的地块级苹果园分类。首先,根据特征像素分布结果计算每个地块对应的元特征。其次,制作地块级样本数据集。样本集制作专家们全面综合现有信息,包括空间和时序元特征、地块内在特征、实地采样数据与考察经验,通过目视解译的方式将地块标记为苹果园地块或非苹果园地块,并基于均匀分布原则,得到3 556个地块样本数据集,包括苹果园地块1 899个、非苹果园地块1 657个。为降低由于样本数据集较小引起的偶然性,提高模型泛化能力,对样本数据集进行十倍交叉验证,同时采用随机搜索策略以获得RF分类器较好的超参数。使用特征类型包括地块内在特征、空间元特征、时序元特征。
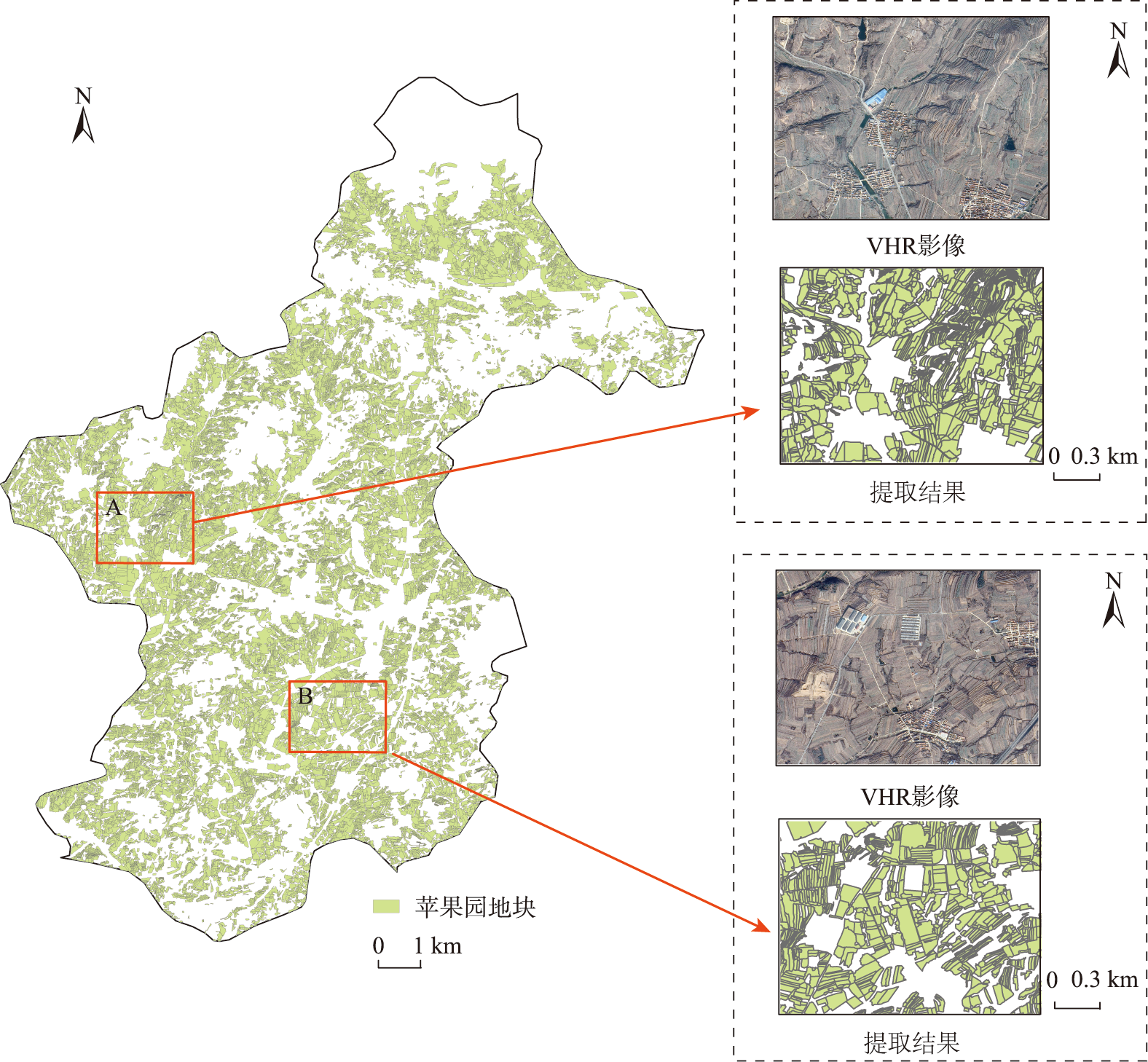
最终,从43 238个候选地块中提取了30 292个苹果园地块,OA为92.7%。3.4节中总结了完整的精度评价过程。图8是最终西城镇苹果园地块级制图结果,突出展示了A、B子区域内苹果园地块提取结果与对应的VHR影像情况。与像素级分类相比,地块级分类将空间上相邻的苹果园像素划分为独立的苹果园地块,消除了像素级分类中无法避免的椒盐现象,更适合于实际应用。
4.4 不同特征组合的分类精度对比
在地块级苹果园提取中,使用的分类特征包括3个部分:地块内在特征(PIF)、空间元特征(SMF)和时序元特征(TMF),PIF描述了地块的形态特征和地理位置特征。SMF和TMF分别描述了地块内空间特征像素与时序特征像素的分布情况。
研究使用7种特征组合下的RF模型(2.4节)分别进行地块级苹果园提取,将样本集按照6:2:2划分为训练集、验证集与测试集,训练结束后在测试集进行预测。各个模型进行20次预测实验并取其精度的平均值后,得到不同特征组合下的模型精度,如表4所示。其中使用PIF+SMF+TMF的特征组合的分类精度最高,OA达到了92.7%,仅使用PIF的分类精度最低,OA仅为68.3%。值得一提的是,对比不同的特征组合分类精度可知,SMF的加入可以有效提高分类精度,存在SMF的特征组合OA均达到85%以上。
| 特征组合 | 苹果园地块 | 非苹果园地块 | 总体精度OA/% | ||||
|---|---|---|---|---|---|---|---|
| PA | UA | F1-Score | PA | UA | F1-Score | ||
| PIF | 0.722 | 0.889 | 0.797 | 0.440 | 0.202 | 0.277 | 68.3 |
| SMF | 0.916 | 0.889 | 0.902 | 0.746 | 0.800 | 0.772 | 86.3 |
| TMF | 0.772 | 0.853 | 0.810 | 0.464 | 0.336 | 0.390 | 71.0 |
| PIF+SMF | 0.928 | 0.901 | 0.914 | 0.758 | 0.816 | 0.786 | 87.8 |
| PIF+TMF | 0.782 | 0.911 | 0.836 | 0.556 | 0.294 | 0.385 | 74.1 |
| SMF+TMF | 0.942 | 0.926 | 0.934 | 0.883 | 0.907 | 0.895 | 91.8 |
| PIF+SMF+TMF | 0.951 | 0.937 | 0.944 | 0.883 | 0.908 | 0.895 | 92.7 |
在只包含一种特征类型的模型中,PIF的OA仅为68.3%,说明虽然苹果园地块有鲜明的形态特征,即面积较小且形状狭长,但仅凭地块的内在特征无法有效的区分地块类型。SMF的OA达到86.3%,在3个模型中精度最高,说明本研究提出的空间元特征具有较强的空间信息抽象与表达能力。苹果园对时序特征有很高的敏感性,TMF的UA高达85.3%,但其PA仅为77.2%,这是由于时间序列影像的空间分辨率相对较低,错分了大量小面积的非苹果园地块。
在2种特征类型组合的模型中,PIF与SMF、TMF结合后,OA均有所增加。尤其是TMF在加入PIF特征后,分类精度得到了显著提升,由71.0%提高至74.1%,说明PIF可以有效地解决时间序列影像空间分辨率低导致的错分问题。SMF+TMF的OA可达到91.8%,TMF的加入更好地区分了与苹果树的空间特征相似,时序特征存在差异的地物,如梨园等。这也说明了本框架将空间与时序特征相结合的优势。
最终,将包含3类分类特征的组合输入模型后,得到的OA为92.7%,是所有模型中精度最高的组合,相较于SMF+TMF特征组合的模型的OA提高了0.9%。总体而言,加入SMF的分类模型得到的OA相对较高,推测有3个原因:① 研究区内苹果园地块面积较小,而时序特征数据源的空间分辨率较低,导致表现不佳;② VHR影像中的苹果园地块具有较强的空间纹理特征,易于识别;③ 研究从同一幅VHR影像中提取的候选地块与SMF,二者可能存在隐式的关联。
4.5 特征重要性分析
利用RF算法自带的平均精度减少指标(Mean Decrease in Accuracy, MDA)进行特征重要性分析,MDA表示特征变量值发生轻微扰动后与扰动前所对应的分类正确率的平均减少量,值越大则表示该特征越重要。研究对七个特征组合进行子特征重要性评估,图9显示了每个特征组合中子特征的MDA位于前6的结果,其中MDA为最大独立分布分数,IDN是独立分布数。
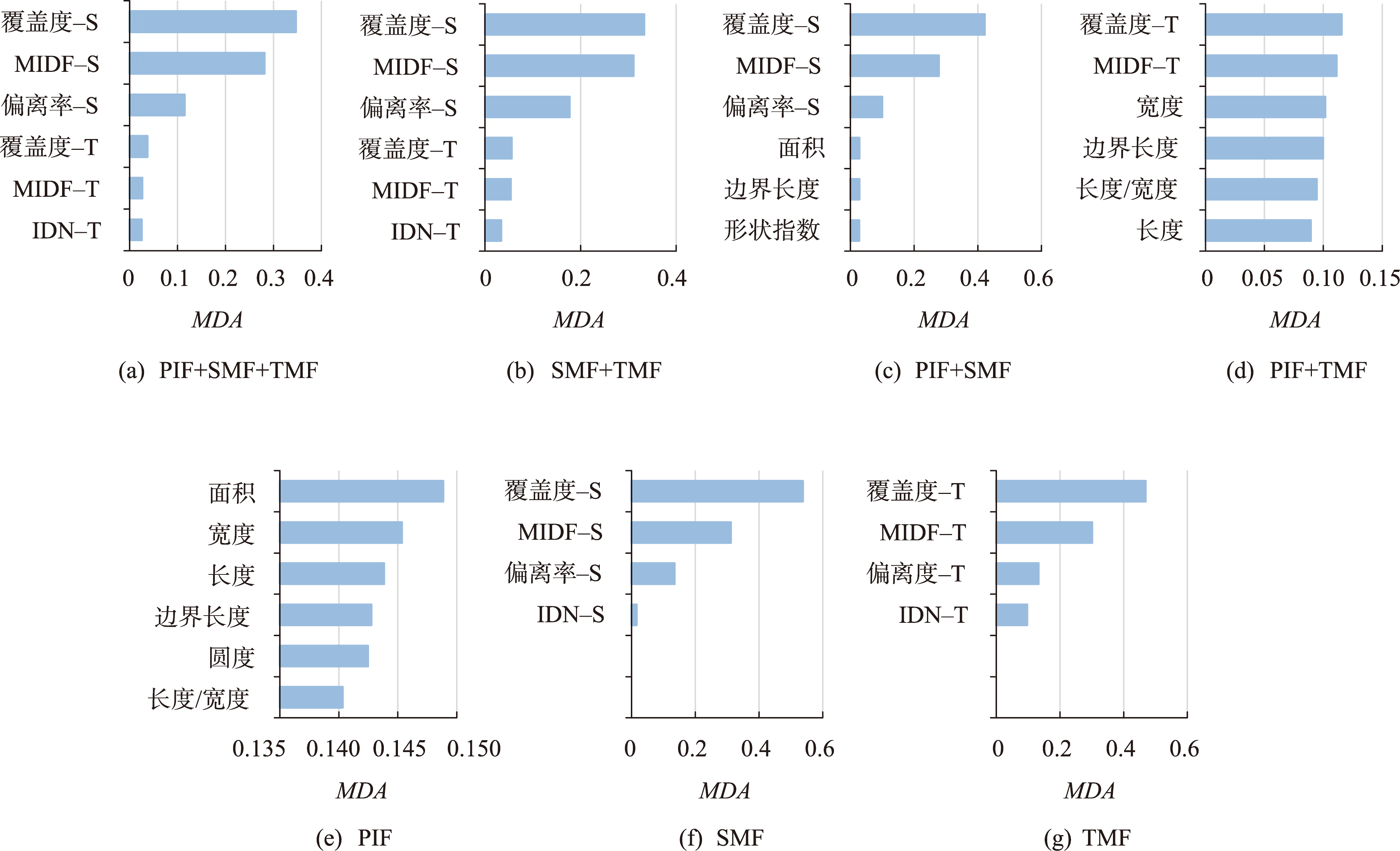
从全部子特征重要性来看,在包含SMF的特征组合中,覆盖度-S的MDA具有绝对优势,说明它是判断地块是否为苹果园的重要特征。包含PIF的特征组合中,属于PIF子特征的MDA普遍较低,说明PIF的子特征在地块分类中仅起辅助作用。值得注意的是,在同时包含SMF与TMF时,SMF的子特征MDA普遍高于TMF,说明SMF在SMF和TMF组合时起决定性作用。
进一步分析只包含一种特征类型模型的特征重要性情况。在PIF中,面积和宽度对地块分类贡献显著,MDA分别达到0.148和0.145,主要是因为苹果园地块有鲜明的形态特征,即面积小且形状狭长。在SMF与TMF中,覆盖度具有较高的MDA,表明覆盖度更能代表特征像素在地块内的分布情况。
5 结论与讨论
复杂场景下地块级苹果园的精准制图,可以帮助管理者精确地掌握苹果树的种植结构,并为决策者在果园精准农业的建设中提供一定的参考。然而,传统的地块级分类制图框架应用于小农经营区内表现较差。本研究提出了一个在复杂场景下小农经营区地块级苹果园模块化制图方法框架,并成功地应用于栖霞市西城镇的地块级苹果园提取任务中。证明了在场景复杂且地块破碎化严重的地区,将单幅的VHR影像与时间序列影像相结合进行地块级苹果园制图的可行性。本研究具有以下贡献:
(1)设计基于分区分层思想的地块提取策略。根据不同地形区的苹果园地块视觉特征构建多个RCF模型,提取出共43 238个苹果园候选地块。解决了复杂场景下苹果园地块较大的视觉差异导致地块提取困难的问题。
(2)提出空间与时序特征像素概念,并设计描述特征像素在地块内分布情况的元特征。利用DABNet与LSTM模型分别从VHR影像与时间序列影像中提取苹果园空间与时序特征像素,并构建元特征描述2种特征像素在候选地块中的分布情况,结合地块内在特征通过RF模型从43 238个候选地块中提取出30 292个苹果园地块,分类总体精度达到92.7%。解决了小农经营区大量的细碎地块,导致传统作物分类方法中使用低空间分辨率的时序影像进行分类效果不佳的问题。
(3)构建模块化的框架结构。本框架中候选地块提取、特征像素提取与苹果园地块分类模块之间彼此独立,各个模块使用的模型可随着深度学习网络的迭代不断优化,并为其他作物类型地块级制图提供参考。
本研究提出的制图方法框架仍存在有待改进的部分:① 地块的分类精度严重依赖于准确的候选地块提取结果,虽然本框架使用分区分层的提取方式能够有效地提取候选地块,但仍存在少量的错误地块;② 本框架在西城镇提取地块级苹果园时准确率较高的一部分原因是,苹果树在秋季具有较强的空间纹理特征与独特的时序特征。在其他作物分类中,若存在纹理特征不明显且时序特征接近的情况,将很难应用本框架进行分类制图。故在今后研究中可以从以下方面进行扩展:改进分层分块地区策略,从而提高候选地块提取精度;融入更丰富的遥感数据类型,例如将微波雷达数据纳入本框架,补足光学遥感影像欠缺的信息。
[ Kou W Q, Shen Z F, Wang H Y, et al. Modular mapping framework of parcel-level apple orchards in smallholder agriculture areas under complex scenes[J]. Journal of Geo-information Science, 2024,26(1):197-211. ] DOI:10.12082/dqxxkx.2024.220153