研究方法
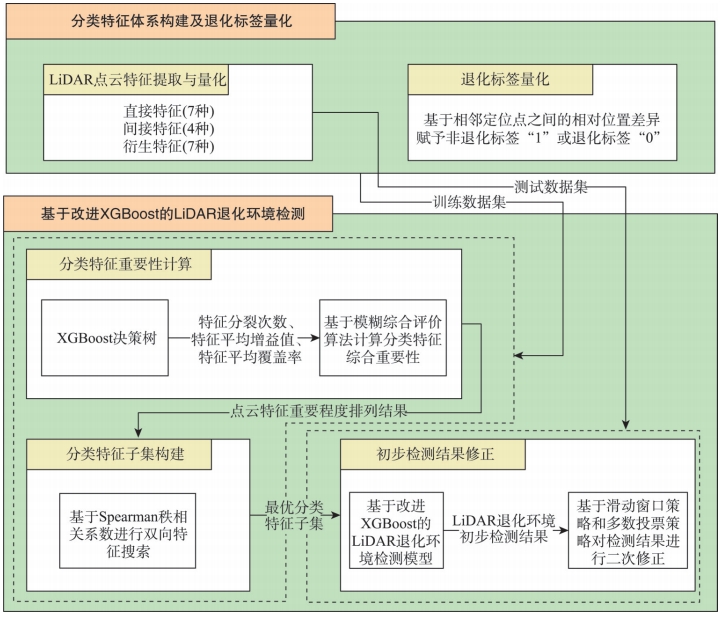
图2:基于改进XGBoost的LiDAR退化环境检测方法流程
本文提出的基于改进XGBoost的LiDAR退化环境检测方法,通过构建点云特征体系并量化退化标签,从而构建模型训练数据集。在XGBoost算法基础上,提出一种点云特征的综合重要性计算方法并采用一种高效的最优分类特征子集构建方法,用于提高模型的检测精度和训练效率。针对XGBoost初步检测结果,提出一种二次修正方法,进一步提高最终的LiDAR退化环境检测精度。
分类特征体系构建及退化标签量化
基于在真实环境中所采集的LiDAR点云,提取并量化能够描述当前环境结构的18种点云特征,用于构建分类特征体系。按照提取方式的不同,划分为直接特征、间接特征、衍生特征。
直接特征 (7种)
- 激光点数量 N
- 高程差 H
- 高程均值 Hmean
- 高程标准差 SH
- X-Y平面投影面积 SXY
- X-Z平面投影面积 SXZ
- Y-Z平面投影面积 SYZ
间接特征 (4种)
- 几何对称程度 C
- 线特征点数量 Nlen
- 独立平面数量 Nnor
- 点云簇聚类数量 Nclu
衍生特征 (7种)
- 点云簇X轴跨度标准差 SX
- 点云簇Y轴跨度标准差 SY
- 点云簇Z轴跨度标准差 SZ
- 点云簇体积比例 Vsca
- 地面点占比 Rg
- 地面点平面度 Pg
- 地面点高程标准差 Sg
基于模糊综合评价的特征重要性计算
为了全面评价点云特征的重要性,本文采用模糊综合评价(FCE)算法计算特征的综合重要性度量指标,用于构建最优的分类特征子集。
// 模糊综合评价算法计算特征重要性
1. 构建评价指标体系,包括信息增益、基尼系数、相关性等
2. 确定评价指标权重向量 W
3. 建立模糊关系矩阵 R
4. 计算综合评价向量 B = W · R
5. 根据综合评价结果对特征进行排序特征重要性排序(示例)
基于Spearman秩相关系数的双向特征筛选
为了提高XGBoost的训练效率,本文提出一种基于Spearman秩相关系数(SCC)的双向特征筛选策略,通过评估特征之间的相关性,构建最优的特征子集。
// 双向特征筛选算法
1. 初始化特征集合 F 和空的特征子集 S
2. 根据模糊综合评价结果,选择最重要特征加入 S
3. 前向搜索:计算 F 中剩余特征与 S 中特征的 SCC
选择与 S 中特征相关性最小的特征加入 S
4. 后向搜索:计算 S 中特征之间的 SCC
如果存在高度相关的特征对,移除重要性较低的特征
5. 重复步骤 3-4,直到满足终止条件基于滑动窗口和多数投票的二次修正
针对XGBoost的初步检测结果,本文提出基于滑动窗口(SW)策略和Boyer-Moore多数投票(BMV)策略进行二次修正,进一步提高LiDAR退化环境的检测精度。
滑动窗口策略
通过在时间序列上设置固定大小的窗口,对窗口内的检测结果进行统计分析,减少孤立误检测点的影响,提高检测结果的时间连续性。
[0, 0, 1, 0, 0] → 窗口大小=3 → [0, 0, 0, 0, 0]
多数投票策略
在滑动窗口内应用Boyer-Moore多数投票算法,找出出现次数最多的检测结果作为最终结果,进一步提高检测的鲁棒性。
[1, 1, 0, 1, 0] → 多数投票 → 1(退化环境)