1 引言
随着居民出行需求的增多,交通拥堵问题日益严重。据美国实时交通信息解决方案提供商Inrix报道,每个美国司机平均每年有97 h被堵在了半路,时间成本折算成经济损失,拥堵的"代价"为人均1 348美元。交通流预测(Traffic Flow Prediction, TFP)作为智能交通系统的重要组成部分,对于缓解城市交通拥堵、优化交通规划具有重要意义。
交通流预测的主要任务是根据历史交通流数据,预估未来某一时间段内某一区域或道路上的车辆数量。现有的交通流预测方法大多侧重于区域级的交通数据,这些区域交通数据虽然能够提供一定程度的交通信息,但难以反映路网精细的交通流变化。城市化进程的加快使得对精细的交通流预测需求日益迫切,道路级交通流预测逐渐受到了研究者的重视。道路级交通流预测可以更好地帮助用户选择路线,更有效地提高出行效率等。
2 交通流预测研究基础
2.1 问题定义
城市范围内的交通路网可以定义为图G(N),其中N表示道路段的集合。将路段i在时间间隔t的交通流记为x_t^i。整个交通路网在时间间隔t的交通流表示为M_t={x_t^1, x_t^2, x_t^3, ..., x_t^N}。
2.2 交通流时空特征分析
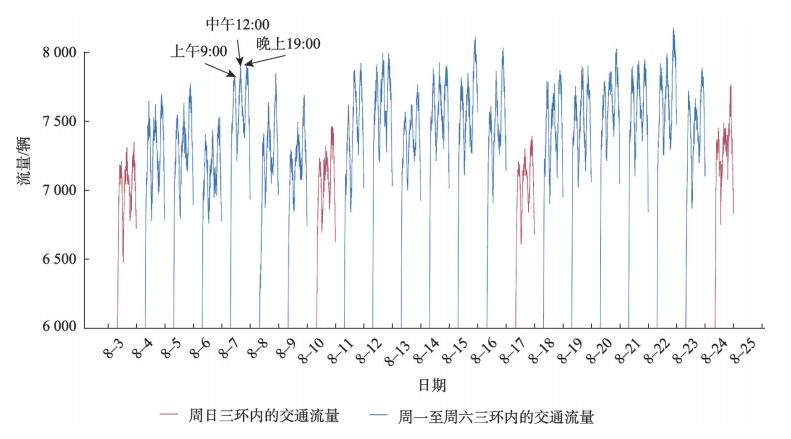
时间特征是理解交通流的重要因素,体现于交通流的日周期性与周周期性之中。这是因为个体的日常活动往往有规律性,即在每天的特定时段重复过去一天的活动,并在上周对应日的同一时间重复这一模式。如图1所示,交通流在每天都呈现出3个明显的高峰时段,分别集中在9:00、12:00和19:00左右。进一步观察周周期性,可以发现交通流量通常在工作日达到峰值,在周日降至低点。这种周期性模式对于指导交通流量预测具有重要意义。
3 基于注意力时空神经网络的道路级稀疏交通流预测流程
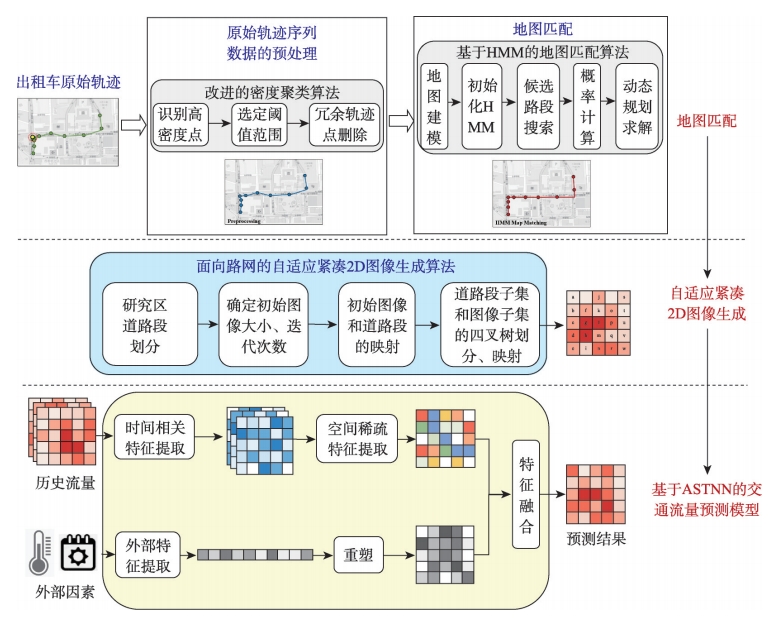
预测流程如图4所示。首先基于改进的密度聚类算法,对原始轨迹数据进行预处理,随后采用HMM地图匹配,获取精确的道路级交通流数据。然后采用面向路网的自适应紧凑二维图像表示方法,实现路网的2D图像表示。最后,本文提出了2种新的注意力时空模块,一个专注于时间相关特征提取的注意力时空记忆块(ASTM block),一个专注于空间稀疏特征提取的注意力时空聚焦块(ASTF block)。为了模拟交通流的最近、日周期和周周期3种时间特征,基于上述2种模块构建了最近模组、日周期模组和周周期模组,3个模组与包含日期信息、温度数据的外部模组共同组成了ASTNN。
4 实验设计及结果分析
4.1 实验区概况及数据来源
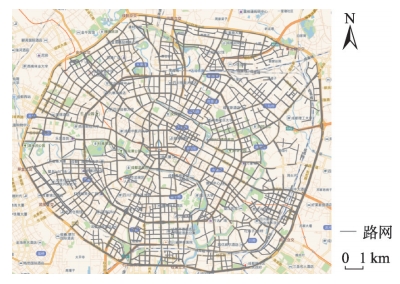
成都是中国四川省的省会,位于四川盆地西部,是中国西南地区的重要中心城市。作为西南地区的交通枢纽,成都拥有发达的交通网络,包括城市轨道交通、城市道路。成都市路网呈典型的环形放射结构,现已基本形成了5条环线和高达20余条射线的快速路网。本文以成都市三环区域内的"快速公路"、"干线"、"一级"、"二级"、"三级"五级道路为研究对象,研究区域的路网如图9所示。城市范围路网数据来自Openstreetmap(www.openstreetmap.org)。本研究使用出租车流量来估计城市范围内的交通流量。使用的数据集包括2014年8月3日—8月30日成都出租车超过14亿条GPS记录。其中,训练集包含2014年8月3日—22日共20 d的数据,测试集包含2014年8月23日—30日共8 d的数据。
4.2 地图匹配
4.2.1 原始轨迹序列数据的预处理
为了减少冗余轨迹点,提高匹配算法的效率,本研究对原始轨迹序列数据进行了预处理。表1是预处理前、后轨迹与路网匹配的时间对比。由表1可见,经过预处理后,车辆的匹配时间大幅降低,减少了约73.6%。本研究的实验环境为:16 GB内存,Intel Core i5-8300H 4核2.3 GHz处理器,4 GB Nvidia GeForce GTX 1050Ti显卡。
4.2.2 地图匹配
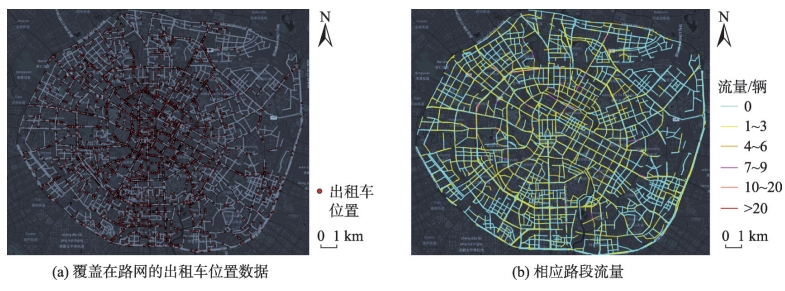
本文利用基于HMM的leuven地图匹配算法将轨迹序列匹配到路网上,匹配结果如图10(a)所示,图中每个红点代表出租车的位置。基于匹配的出租车位置信息得到图10(b)中的道路级交通流数据。
4.3 自适应紧凑2D图像生成
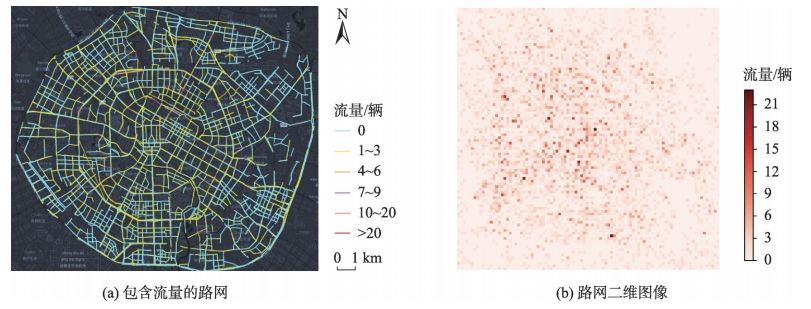
提取成都市三环内8 935个路段,采用面向路网的自适应紧凑二维图像表示方法生成2D图像。将8 935个路段转换为96像素×96像素的图像,填充率为96.95%,由图11可见,路网中有很多没有流量的路段,这也可以看出交通流数据是稀疏的。
4.4 交通流量预测
4.4.1 数据归一化
本文使用Min-Max方法将输入图像的像素值缩放到0~1的范围内,如式(10)所示。然后,通过均值和标准差进行归一化,缩放到-1~1的范围内,以满足输入的要求。
4.4.2 模型训练细节
本文中,p=3, k₁=1, k₂=1。在训练开始前,选择Adam做为优化器,MAE作为损失函数,批量大小设置为32,训练epoch数设置为30,初始学习率为1e-4。在训练过程中,采用时间衰减策略调整学习率,每5个epoch学习率降低到原来的10%。
4.4.3 模型评估指标
本研究使用的评价指标包括均方误差(MSE)、平均绝对误差(MAE)和R平方(R²)。MSE通过计算平方差来衡量模型的拟合程度。MAE测量预测和真实之间的平均绝对差。R平方测量观测数据中可由模型解释的变异比例,表明模型与数据的拟合。较高的R平方表明对观测数据的变异性有更好地解释。
5.1 结论
本文提出的交通流预测模型是一种基于出租车轨迹大数据自上而下的方法。首先对原始出租车轨迹进行预处理,将其映射为道路级交通流,然后将其生成二维图像。通过对道路级交通流进行时空特征分析,发现在时间维度上交通流有明显的周期性;在空间维度上,含有交通流的路段约占总数的22%~36%,这种交通流的空间稀疏性对预测建模提出了挑战。针对不同维度特性,本文提出了2种注意力时空模块,专注于挖掘时间相关性的ASTM块和处理数据空间稀疏性的ASTF块。本文提出的ASTNN模型采用ASTM块和ASTF块对最近模组、日周期模组、周周期模组的时空特征进行提取,并融合外部因素进行预测。
5.2 讨论
随着车载移动传感器技术的不断发展,车辆位置更新频率不断提高,轨迹数据更加丰富和精细。然而,高频率的轨迹数据也带来了数据量大、噪声多、复杂度高等问题,需要有效的处理来提高数据质量和可用性,本文提出的轨迹数据处理方法正是针对这一需求而设计的。对于早期那些时间跨度较长、采样频率较低的轨迹数据,本文的方法并不适用。