引言
月球作为地球唯一的天然卫星,是人类深空探测的第一站,也是实施探测任务最多的天体。20世纪50至70年代,美国和苏联掀起了第一次月球探测高潮;20世纪末至今,随着美国重返月球计划的实施,世界上其他的航天大国也制定了新一轮的月球探测计划,掀起第二个探月热潮。我国探月工程四期将开展国际月球科研站基本型建设,载人月球探测工程登月阶段任务各项研制建设工作也在加紧推进,瞄准2030年前实现中国人首次登陆月球。
载人月球探测的重要性
载人月球探测作为我国一项重大战略任务,承载着探索月球科学价值、占领地月空间科技制高点的重大使命,随着2030年前实现载人月球探测及月球科考站建设的目标设定,任务复杂度、安全性和可靠性要求与日俱增。
在这一背景下,高精度月球形貌测绘成为保障任务顺利实施的关键,不仅为着陆区评估与选择、科学探测目标确定、月面活动规划等提供重要的数据信息支撑,同时也是深化月球科学研究、理解月球地质演化、探索地-月系统的形成与演化的重要基础。
轨道器遥感是月球探测的重要手段,通过平台搭载的激光高度计、光学相机、合成孔径雷达(SAR)等传感器获得月表形貌探测数据。在国内外历次探测任务中,已经积累了大量的形貌探测数据,这些数据呈现多源、多模态、多尺度、多重覆盖的特点。
利用这些数据,基于激光测高、摄影测量、雷达测量等形貌测绘技术,研究人员已制作出不同覆盖范围、分辨率和精度各异的形貌制图产品,如数字高程模型(Digital Elevation Model, DEM)和数字正射影像(Digital Ortho Map, DOM),这些产品在月球探测中具有重要的科学研究和工程应用价值。
月球形貌测绘的挑战
月球形貌测绘是一个复杂的过程,涉及遥感数据的获取与处理、几何模型构建、区域网平差、立体影像匹配、三维地形重建等多个环节,其精度受到各种因素的综合影响。在形貌测绘过程中,需要克服由于月球轨道器定轨定姿精度低、缺乏卫星导航定位设施以及高精度空间参考基准所带来的遥感数据定位精度低的问题。此外,还需应对月球表面的复杂地形和光照条件对遥感数据质量的影响,这包括变形、遮挡、叠掩、透视收缩等影像的几何问题,以及阴影、低照度、低对比度、纹理贫乏和重复等影像的强度问题。
月球形貌遥感探测任务及数据现状
月球遥感探测的起点可追溯到苏联的Luna 3任务,它首次拍摄了月球背面的图像,揭开了人类对月球探索的序幕。在第一次探月热潮中,美国Apollo系列和苏联Luna系列的轨道器任务通过立体相机和激光高度计等,实现了对月球表面的形貌遥感测绘。
自20世纪90年代以来,随着遥感技术的进步,第二次探月热潮拉开序幕。在这一阶段,月球轨道器任务在形貌测绘方面取得了长足的发展,通过激光高度计、光学遥感和雷达遥感在内的多种探测手段获得了更高精度、更高分辨率的多源数据,为更准确、更详细地获取月表形貌信息发挥了重要作用,进一步推动了对月球的探索和认知。
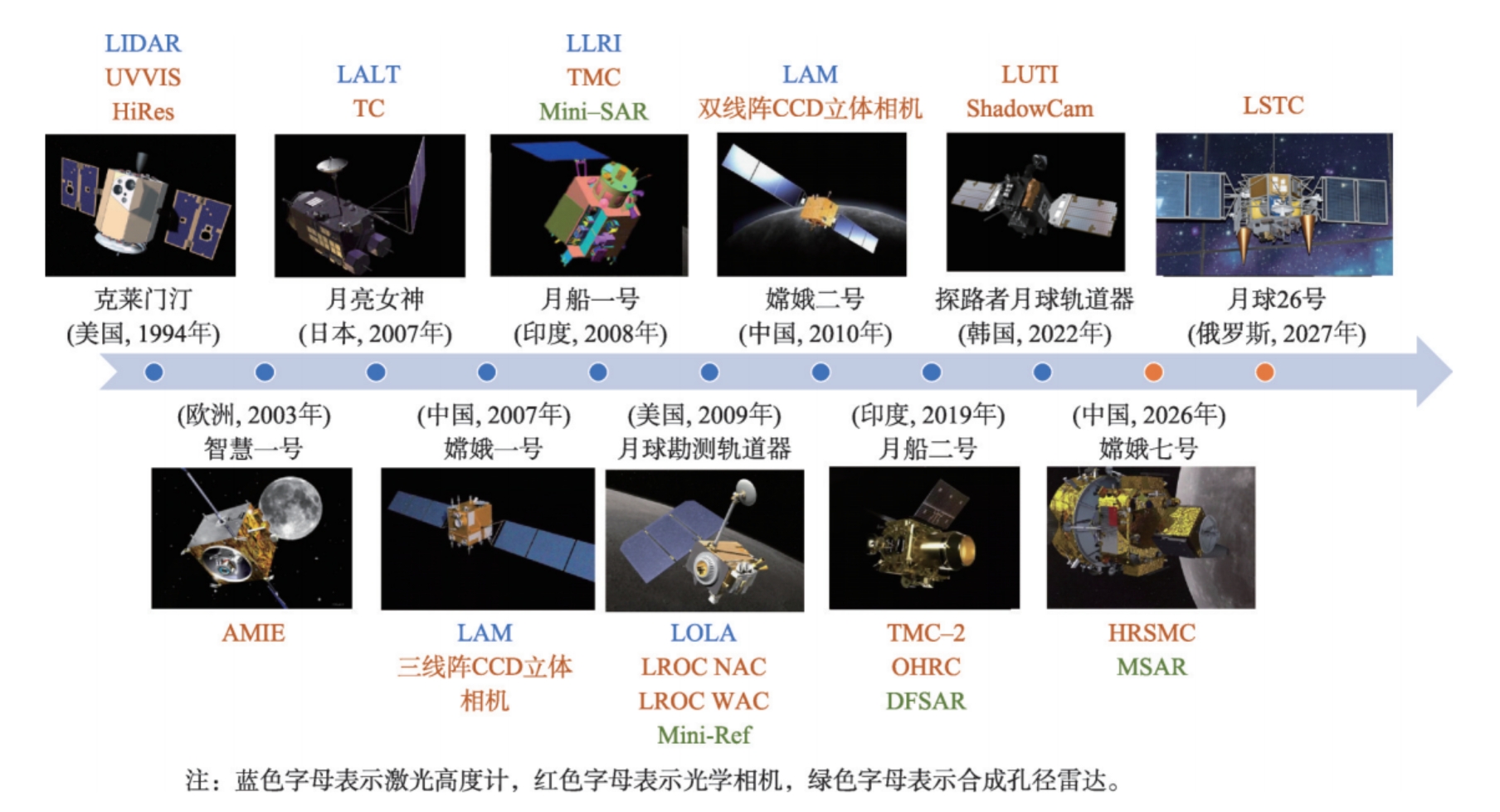
图1 第二次探月热潮以来已发射和计划发射的月球轨道器及搭载的形貌探测载荷
克莱门汀号 (1994)
月球探测的新起点始于1994年发射的美国"克莱门汀号"(Clementine)轨道器,搭载了激光测高仪LIDAR、紫外线/可见光相机UV/VIS和高分辨率摄影机HIRES 3台用于形貌探测载荷。
LIDAR在400~450 km的轨道高度上首次获取到了近乎覆盖全月的激光测高数据,测距精度约为100 m,制作了7.5 km格网间距的DEM,覆盖了79° S—82.9° N间的月面区域。
智慧一号 (2003)
欧洲空间局于2003年率先发射了"智慧一号"(SMART-1)探测器,这是欧洲首次独立开展的月球探测项目。搭载的彩色成像相机AMIE在400~3 000 km轨道高度上获取了月表的可见光和近红外影像,平均空间分辨率为80 m,最高可达30m。
月亮女神号 (2007)
2007年日本发射的"月亮女神号"(SELENE/KAGUYA)卫星通过激光高度计LALT、地形相机TC和多波段成像仪MI等载荷,获得了丰富的月球形貌探测数据。LALT在100 km轨道高度可获得1 m测距精度的激光足印数据,利用约670万个测量数据构建了空间分辨率优于0.5°的全月DEM数据。
嫦娥一号 (2007)
"嫦娥一号"(CE-1)是我国首次月球探测任务,于2007年成功发射。CE-1探测器搭载了激光高度计LAM和三线阵CCD立体相机等形貌探测载荷,获得了全月形貌数据。基于LAM观测的约912万个数据,制作了3 km空间分辨率的全月DEM,平面和高程方向精度分别为445 m和60 m。
月船一号 (2008)
印度于2008年发射了"月船一号"(Chandrayaan-1)探测器,搭载的形貌探测载荷包括激光高度计LLRI、地形制图相机TMC和NASA研制的微型合成孔径雷达Mini-SAR。LLRI的测距精度优于5 m,TMC采用三线阵CCD相机对全月进行推扫成像,影像分辨率为5 m。
月球勘测轨道器 (2009)
美国宇航局(NASA)2009年发射的月球勘测轨道器LRO搭载了月球轨道激光测距仪LOLA、月球勘测轨道器相机LROC和微型射频仪器Mini-RF。LOLA利用多波束技术在月球表面获取了超过70亿个有效的高度测量数据,测距精度为0.1 m。
嫦娥二号 (2010)
"嫦娥二号"(CE-2)探测器于2010年发射,搭载的双线阵CCD立体相机在100 km高度的轨道上对全月进行立体成像,获得了分辨率为7 m、幅宽为43 km的影像,在15 km轨道高度上获取了雨海虹湾区的分辨率优于1.5 m的高分辨率立体影像。
月船二号 (2019)
2019年7月发射的"月船二号"(Chandrayaan-2)搭载了高分辨率相机OHRC。OHRC专为在极低太阳高度条件下进行成像而设计,在100 km的轨道高度上,OHRC影像的分辨率高达0.25 m,幅宽为3 km。
探路者月球轨道器 (2022)
探路者月球轨道器(KPLO)是韩国的首个月球轨道探测器,于2022年发射成功。KPLO搭载的形貌探测传感器有月球地形成像仪(LUTI)和阴影相机(ShadowCam)。LUTI在100km轨道高度上通过推扫成像可以获取空间分辨率为2.5 m、幅宽为8 km的月表影像。
| 载荷类型 | 载荷名称 | 测距精度 | 空间分辨率 | 制图产品 |
|---|---|---|---|---|
| 激光高度计 | LIDAR | 100 m | - | 7.5 km格网DEM |
| LALT | 1 m | - | 0.5°全月DEM | |
| LAM | 60 m | - | 3 km全月DEM | |
| LLRI | 5 m | - | 局部地区地形剖面图 | |
| LOLA | 0.1 m | - | 1024 ppd全月DEM | |
| 光学相机 | UVVIS | - | 100~325 m | 118 m全月DOM |
| HIRES | - | 7~20 m | - | |
| AMIE | - | 30~250 m | 250 m全月DOM | |
| TC | - | 9.2~10.3 m | 10 m全月DOM/DEM | |
| CE-1三线阵立体相机 | - | 120 m | 120 m全月DOM, 500 m全月DEM | |
| CE-2双线阵立体相机 | - | 1.5/7 m | 7 m, 20 m全月DOM/DEM | |
| OHRC | - | 0.25 m | 局部区域0.28~0.32 m DOM/DEM | |
| LUTI | - | 2.5 m | - | |
| SAR | Mini-SAR | - | 150 m | 极区雷达散射影像 |
| Mini-RF | - | 30/150 m | 月表66%覆盖的雷达影像 |
表1 主要形貌探测载荷指标与制图产品
当前月球遥感探测面临的挑战
- 激光高度计的覆盖问题导致中低纬度区域的激光数据密度相对稀疏,影响高程数据的整体准确性
- 高分辨率光学立体影像的覆盖区域仍然稀少,且在阴影区缺乏有效观测数据,限制了在特定区域的详细形貌分析
- 当前月球遥感探测中SAR技术的发展滞后于其他技术,其在某些应用场景下无法提供匹配的精度与分辨率
- 受传感器和平台的定轨定姿精度、传感器获取数据质量的参差不齐、高精度控制信息的缺失等影响,导致形貌遥感测绘的精度相对较低
月球形貌遥感测绘技术研究进展
随着月球探测需求的不断增长以及载荷技术的持续进步,形貌遥感测绘技术已经实现了显著的发展。其中,激光高度计作为关键的测绘手段,其测高模型和数据处理方法经过不断优化,显著提高了测量的准确性和可靠性。在光学摄影测量领域,成像几何模型、几何定位与平差等技术取得了突破性进展。通过立体测量法和光度测量法,不仅实现了更高分辨率的制图,还显著提高了定位精度。SAR技术在月球形貌测绘中也展现出巨大潜力,尤其在永久阴影区等光照不足的环境中,能够提供有效的数据。
激光高度计测高
激光高度计是获取地表三维空间信息的重要的主动遥感手段,通常由一个固态脉冲激光源、一个朝向卫星天顶轨道的望远镜(用于收集行星表面的回波)和一个定位系统组成。
月球轨道器激光高度计通过测量激光脉冲从卫星发射到月表反射并返回的时间来计算卫星到月表的距离,并根据月球的几何半径、卫星的轨道高度以及仪器的指向角来构建几何定位和高程解算模型,确定激光足印内月球表面的地形高度。
关键技术:
- 激光高度计测高模型
- 激光高度计数据平差与形貌测绘
- 交叉点平差处理
光学摄影测量
光学传感器成像几何模型通过将物体的三维坐标映射到影像平面上的像素坐标来表示成像过程中的几何关系,是利用摄影测量进行空间定位制图和三维重建的基础。
根据是否对物理成像过程进行建模,传感器的几何模型主要分为两大类:严格成像几何模型和通用成像几何模型。
关键技术:
- 光学传感器成像几何模型
- 光学影像几何定位与平差
- 立体测量与光度测量
合成孔径雷达测量
合成孔径雷达(SAR)是一种主动微波遥感技术,能够穿透云层和夜间工作,特别适合探测月球永久阴影区。
SAR技术在月球形貌测绘中展现出巨大潜力,尤其在永久阴影区等光照不足的环境中,能够提供有效的数据。
关键技术:
- SAR干涉测量
- 雷达立体测量
- 雷达影像处理
| 探测方式 | 测绘精度 | 分辨率 | 光照影响 | 地形影响 | 数据处理难度 |
|---|---|---|---|---|---|
| 激光高度计测量 | 最高 | - | 不受影响 | 地形起伏引起光斑直径变化,影响测距精度 | 简单 |
| 光学摄影测量 | 一般 | 高 | 易产生阴影 | 复杂地形增加影像匹配难度,影响地形测量精度 | 一般 |
| 合成孔径雷达测量 | InSAR测高精度较高 | 低于光学相机 | 不受影响 | 侧视成像易受地形影响,可能导致遮挡、叠掩和透视收缩 | 复杂 |
表2 不同形貌遥感探测方式特点
3.1 激光高度计测高
3.1.1 激光高度计测高模型
激光高度计是获取地表三维空间信息的重要的主动遥感手段,自1971年Apollo计划首次在深空探测中开展月球表面激光探测后,激光测高技术被广泛应用于月球和其他行星探测领域。
月球轨道器激光高度计通过测量激光脉冲从卫星发射到月表反射并返回的时间来计算卫星到月表的距离,并根据月球的几何半径、卫星的轨道高度以及仪器的指向角来构建几何定位和高程解算模型,确定激光足印内月球表面的地形高度。
3.1.2 激光高度计数据平差与形貌测绘
激光高度计工作时,上升轨道和下降轨道剖面会在不同时间点相交于同一位置,该位置即为轨道交叉点。由于系统误差以及测量误差等的存在,激光高度计在不同时刻经过轨道交叉点时测得的高度值会出现偏差,该偏差称为交叉点高程差或交叉点不符值。
利用交叉点不符值对测高观测值进行平差是削弱径向轨道误差的基本方法,称为交叉点平差。在各国的探测任务中,激光高度计的交叉点平差方法被广泛用于减少激光测高过程中引入的误差。
3.2 光学摄影测量
3.2.1 光学传感器成像几何模型
光学传感器成像几何模型通过将物体的三维坐标映射到影像平面上的像素坐标来表示成像过程中的几何关系,是利用摄影测量进行空间定位制图和三维重建的基础。
根据是否对物理成像过程进行建模,传感器的几何模型主要分为2大类:严格成像几何模型和通用成像几何模型。严格成像几何模型以摄影测量中的共线方程为基础,依据摄影中心、像点和对应地面点三点共线这一几何条件来恢复成像时光线的几何位置关系,是影像几何定位的理论基础。
3.2.2 光学影像几何定位与平差
影像的几何定位是通过遥感影像获得月面目标位置信息的重要技术手段,其精度直接影响到基础影像及其形貌制图产品的几何质量。
由于缺少绝对定位控制点,月球轨道器遥感影像通常采用平差方法来提升整体的相对定位精度,间接提升一定的绝对定位精度。目前月球立体影像的几何处理研究中,大多都是利用立体或多重覆盖的影像数据,基于严格成像几何模型建立各传感器的成像参数精化模型,通过最小二乘调整来改正目标影像的轨道和姿态。
未来展望
随着月球探测任务的持续推进,特别是载人月球探测工程的实施,对月球形貌遥感测绘提出了更高的要求。未来月球形貌遥感测绘的发展将主要集中在以下几个方面:
传感器能力提升
未来的月球遥感传感器将朝着更高空间分辨率、更高精度、更宽谱段方向发展。激光高度计将实现更高的测距精度和更密集的覆盖;光学相机将实现更高的空间分辨率和立体观测能力;SAR系统将实现更高的分辨率和更好的穿透能力。
月球绝对参考框架优化
建立高精度的月球绝对参考框架是提高月球形貌测绘精度的关键。未来将通过月球着陆器、月球车以及月球科研站等设施,建立更多的月面控制点,构建更高精度的月球参考框架,为月球形貌测绘提供更可靠的几何基准。
多源数据融合精细建模
未来将更加注重多源、多模态、多尺度数据的融合处理,充分发挥各类数据的优势,实现更高精度、更丰富细节的月球形貌建模。特别是激光测高数据与高分辨率光学影像的融合,将为月球表面形貌的精细重建提供更多可能。
海量遥感数据智能高效处理
随着月球遥感数据量的持续增长,基于人工智能和深度学习的数据处理方法将得到更广泛的应用。这些方法将显著提高数据处理的自动化程度和效率,加速月球形貌测绘产品的生产过程,并提高产品的精度和质量。
面向2030年载人月球探测的形貌测绘需求
随着2030年前实现中国人首次登陆月球的目标临近,对月球形貌测绘的需求将更加迫切。高精度的月球形貌数据将是保障载人月球探测任务安全实施的关键,也是支持月球科学研究和资源利用的重要基础。
未来的月球形貌测绘将更加注重对着陆区和科考站建设区的精细测绘,提供更高分辨率、更高精度的形貌数据,为着陆点选择、月面活动规划和科学探测提供有力支持。同时,对月球极区和永久阴影区的探测也将得到加强,为寻找月球水冰资源提供重要依据。