引言
空间格局通常指要素在特定空间中的组织和分布,包括数量、质量、位置、分布模式、相互关系,以及这些特征随时间的变化。从空间上来讲,这些要素可以位于地球上,也可以位于如月球等深空天体上;从尺度上来讲,这些要素可对应全球格局、区域格局或局部格局。为掌握某关键要素空间格局的特定状态、发生过程和演变规律,可利用自相关分析、热点分析和空间回归分析等空间分析技术揭示空间要素的分布规律,并进一步构建空间模拟模型推演空间要素演变过程及可能情景。简而言之,不同场景空间要素的信息提取、格局评估和演变规律的研究均依赖于空间分析与动态建模的共性理论基础。
空间要素的格局演变与时间、环境等密切相关,其变化、转移、相关关系等是必然性与偶然性的结合,即某一现象或情景的出现存在一定的概率。这一概率就发生概率,具体包括转移概率和适宜概率2个方面。转移概率指的是给定条件下,空间要素随时间变化从一个状态转移到另一个状态的概率;而适宜概率指的是在特定条件下,空间要素出现或其相关事件发生的概率。在地球观测领域中,针对不同的具体问题有不同的概率计算模型,例如地质灾害发生概率、土地利用转移概率等。在深空探测领域,虽然已有文献量远不及地球观测,也同样具有较多空间格局演变的典型现象,例如月球南极水冰的存在概率、火星生命痕迹的出现概率、某区域探测着陆的适宜概率等。
研究意义
虽然应用发生概率来描述地表和深空场景要素的空间格局与可能演变情景具有一定的相似性,但由于地表和深空的概率计算模型在具体机理存在一定的差异,导致这些模型在各自领域表现良好,但在跨领域应用时其适用能力可能会受到限制。为了应对这一挑战,本文旨在构建一套覆盖地表和深空探测的通用发生概率建模方法,结合遥感数据、地理信息处理与智能化方法来实现从地表要素到深空天体要素的有效拓展。
理论上讲,关键要素空间格局的形成和演变受到数十甚至上百个复杂因素影响,这些影响因素相互作用,共同塑造了要素的空间分布和相互关系。地表要素的空间格局通常受自然和人为因素的影响,而目前人类认知的深空天体要素则为自然因素,前者因为自然-人为的交互影响导致复杂度高,而后者则因为未知性和不缺性导致难度高。当将这些因素进行量化和空间可视化时,不管地表还是深空天体,其数据表达方式都是一致的,均可由栅格和矢量结构来表达。例如,对地观测中的土地要素,可同时采用矢量面域和栅格来表达;深空探测中的水冰要素,可同时采用矢量点、面和栅格来表达。
在空间格局探测推演方面,尤其是土地利用覆盖等地表要素和水冰及其选址等月表要素具有较多共通性,二者本质上都是概率选择问题,都受复杂的多因素作用机制影响。为此本文提出了一种通用的基于五类共性因素发生概率建模范式(TCAPH),并针对转移概率和适宜概率进行范式具化,并对地表要素模拟推演和月球科研站选址推演进行案例应用。提出的TCAPH理论模型旨在解决地表和深空天体要素的情景转移概率和选址适宜概率求解难题,并服务于对地观测和深空探测等需求。
基于五类因素的发生概率建模方法
2.1 空间格局探测的五类共性因素
五类共性因素在地表和地外天体的空间分析与推演预测中具有普遍应用价值。这些因素存在于一定地形地貌环境中,尽管其对应的物理意义可能具有差异,但是具有共性的数据结构定义和表达方式(栅格和矢量)。
地形(T)
指地球或地外天体表面的自然形态和特征,包括各种高低起伏的形貌特征,影响因素可以通过共性的高程、坡度、坡向、粗糙度等指标来表征。
限制区(C)
指因特定原因而被不能开发或探测的区域,如地表环境中受政策或环境保护的区域,或月表环境中探测器不能开展活动的危险区域,限制区的发生概率被定义为零。
可达性(A)
指空间要素之间交流和互动的便利度,即从一个空间位置到另一个位置所需的时间、成本和便利性,影响空间格局的形成和适宜选址的空间位置。
邻近性(P)
指空间要素之间的邻近程度,即某一空间要素与其他重要要素的距离,可以映射为邻域效应,这直接影响要素之间的相互作用关系,进而影响要素的空间分布及其演变模式。
异质性(H)
指空间要素在不同位置之间的多样性和不均匀性,如地表环境中的土地利用梯度和要素密度差异,或月表环境中的地质和水冰空间分布差异,是表征空间格局同时也是影响空间演变的核心因素。
针对不同对象的空间格局探测推演,上述五类因素可具体化为几十到几百个不同的子因素,用于模型建立和实际问题的解决。
2.2 五类因素理论模型及发生概率推演范式
空间格局探测推演旨在通过对现有空间数据的分析和建模,基于其历史演变规律和各种空间要素之间的关系来推断空间中的特定格局、模式或趋势。可以将其过程抽象为一个四元函数表示的数学模型:
System = F(Element, Spaced, Time, Driver)
式中:System 表示一个复杂空间系统;F是描述空间要素之间相互作用和转换关系的数学规则或模型;Element 表示空间现象或要素集合;Spaced表示 d 维的空间;Time 代表时间因素;Driver 代表影响因素集合。
在这个数学模型中,规则 F 是实现空间格局探测推演的关键,本文将 F 定义为发生概率模型,命名为 TCAPH。TCAPH 模型应用总体发生概率Pglobal来表征要素的空间格局或发生变化的可能性,涵盖地形(T)、限制区(C)、可达性(A)、邻近性(P)、异质性(H)五类共性核心因素,如下所示:
Pglobal = F(T, C, A, P, H)
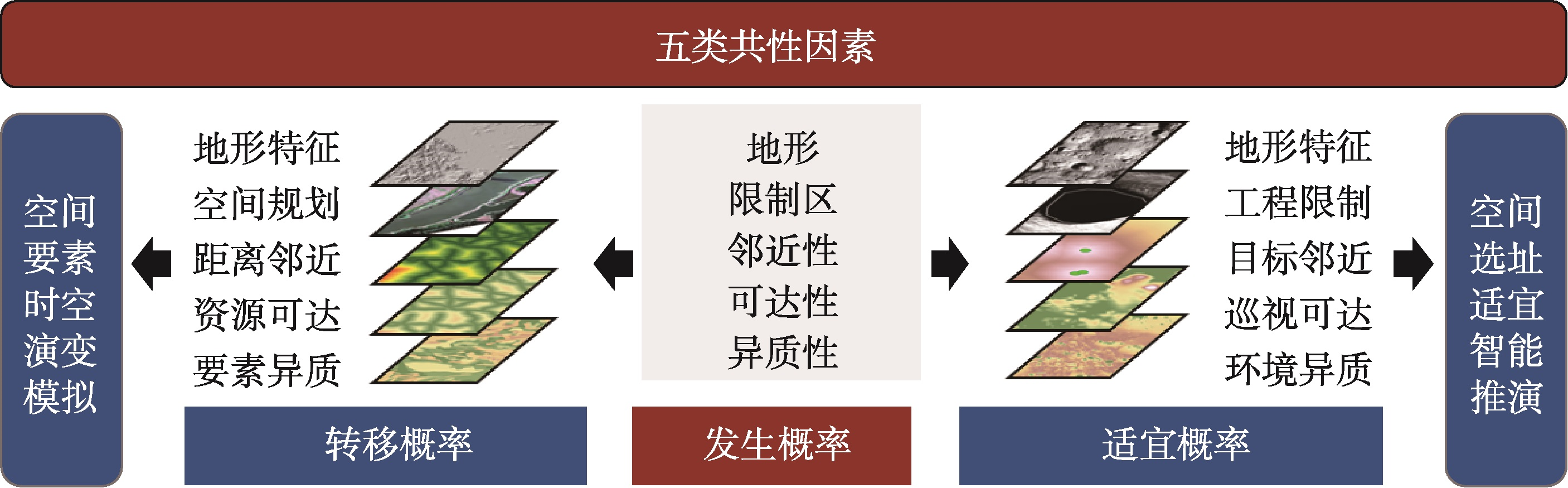
图1 基于五类因素和发生概率的地表和月表空间格局推演范式
基于以上 TCAPH 框架,提出基于转移概率(Pglobal:trans)的空间演变推演方法(TCAPH-Trans)和基于适宜概率(Pglobal:suit)的选址适宜推演方法(TCAPH-Suit)。其中 TCAPH-Trans 方法可解决地表空间要素演变、月表太阳辐射时空演变等问题,而 TCAPH-Suit 方法可解决地表基础设施选址、月表着陆建站选址等问题。
2.3 基于转移概率的空间演变推演方法
TCAPH-Trans 方法的基本思想是使用转移概率描述多种驱动因子影响下历史格局变化的可能性,并根据这个可能性推演现在格局如何演变为未来格局。以复杂土地利用为例阐述 TCAPH-Trans 方法的具体化,将地形特征(T)、空间规划限制(Cplan)、资源可达(Afaci)、邻近性(包括距离邻近 Pdis和元胞邻域 Pnei)、土地利用异质(Hland)映射转移概率规则,定义如下:
Pglobal:trans = plocal(T, Cplan, Afaci, Pdis, Hland) × Pnei × Rand
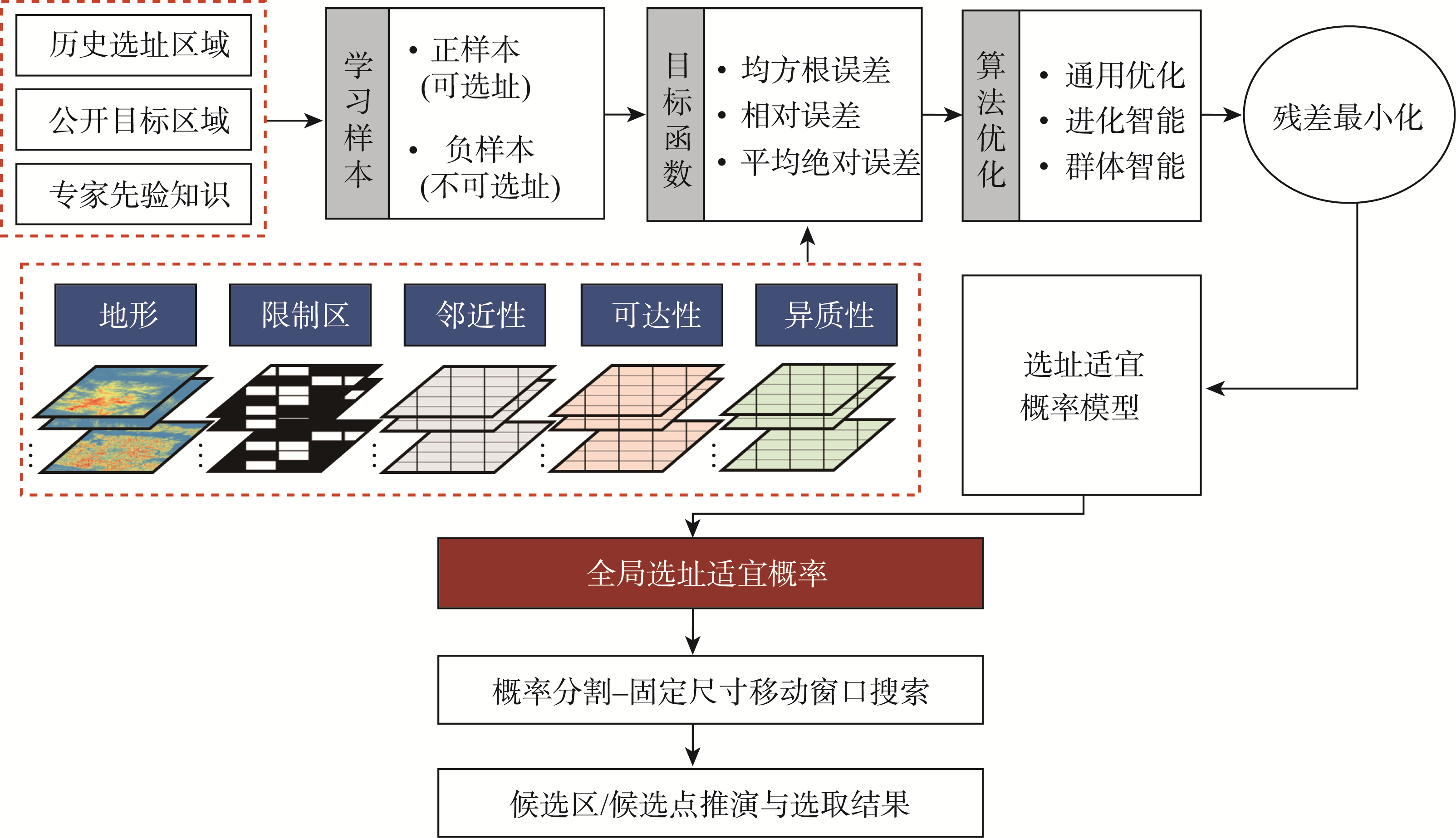
图2 基于转移概率的空间演变推演方法流程
2.4 基于适宜概率的选址适宜推演方法
TCAPH-Suit 方法基于已知适宜选址区域与驱动因素的关系推演未知区域的选址可能性。以月球科研站选址为例,阐述 TCAPH-Suit 方法的具体化映射,即地形特征(T)、工程限制(Ceng)和永久阴影区(Permanently Shadowed Region,PSR)限制(CPSR)、巡视可达性(Atour)、科学目标邻近性(PPOI)、动态环境异质性(Henvi)等。基于以上五类因素,适宜概率规则定义如下:
Pglobal:suit = plocal(T, Ceng, PPOI, Atour, Henvi) × CPSR × Rand
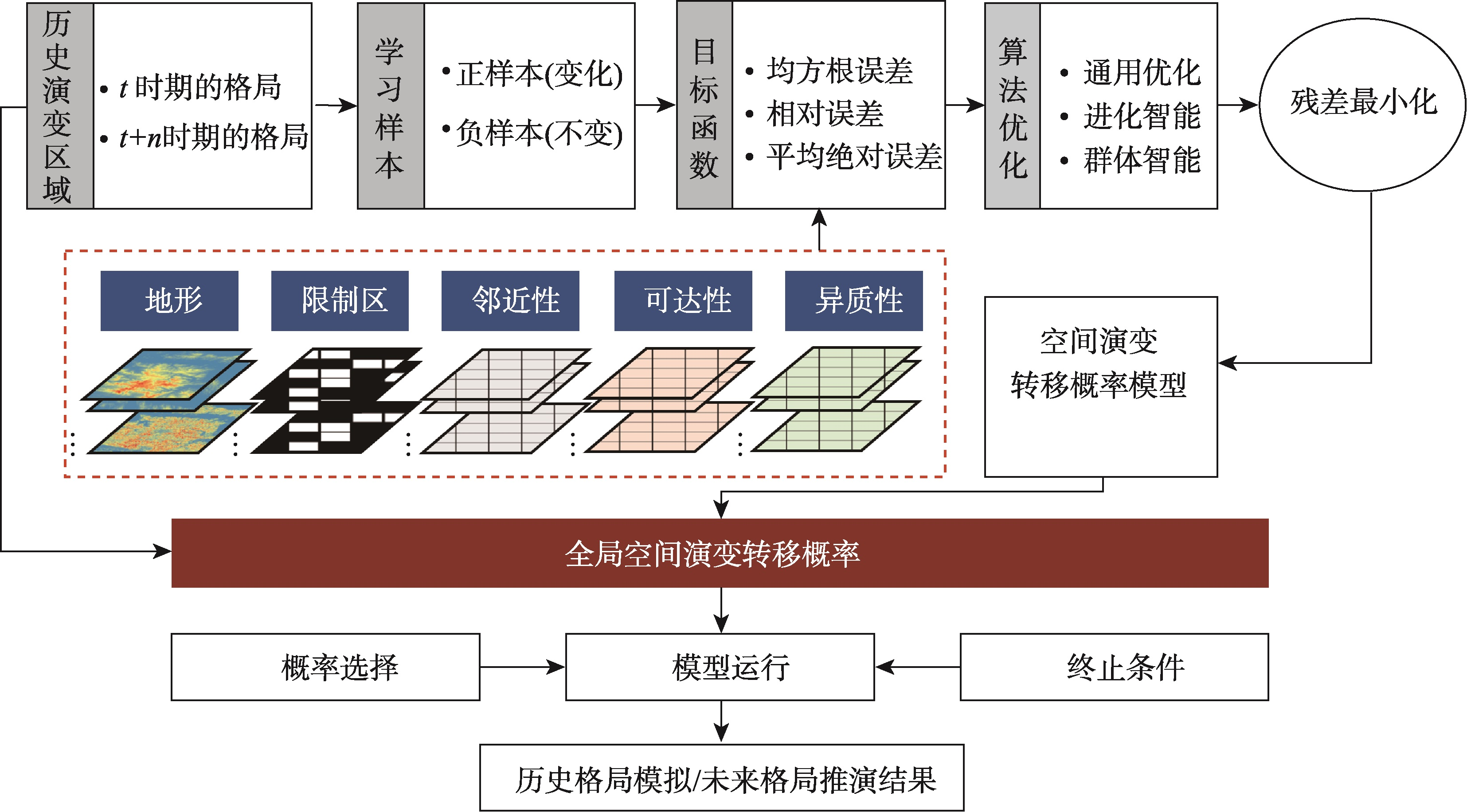
图3 基于适宜概率的选址适宜推演方法流程
2.5 推演和选址模型的智能优化方法
为了在空间格局探测推演规则构建中考虑复杂实际限制,生成更接近真实世界的模拟结果,可采用智能算法对推演规则进行优化。算法建立过程中,需要将模拟推演的实际问题映射到算法空间,即用数学模型将待解决的问题表达出来:初始化问题解与相关参数,根据搜索方案产生迭代解,最后通过空间反变换输出原问题的解。
本文以粒子群优化(Particle Swarm Optimization, PSO)算法为例,介绍推演规则参数挖掘过程。PSO 算法将个体看作是在 D 维搜索空间中没有形状、没有重量的粒子,通过这些粒子的相互协作和信息共享,在复杂的解空间中寻找最优解。在实际技术流程中,每个参数的上下限(参数空间)由逻辑回归(Logistic Regression, LR)算法初步设定,依据其导出系数的正负性将区间设置为[0, +∞)或(-∞, 0]。基于此参数空间,采用 PSO 算法进行参数优化,调整参数上下限不断逼近,直至所有参数稳定在其空间内,则认为此时的参数为最优参数。
TCAPH 模型的空间格局探测推演应用
3.1 基于TCAPH-Trans的土地利用变化推演
本文选择长三角城市为研究对象,对 TCAPH-Trans 方法进行空间演变推演案例应用。用到的数据包括土地利用分类数据和五类因素数据,其中,土地利用分类数据来自 GlobeLand30 数据集;地形图是使用 30m 地理空间数据云平台提供的 GDEMDEM 数据导出的 DEM,其他四类因素空间数据集的收集来自于开放街道地图。在对100多个因子进行统计筛选,排除共线因子的基础上,表1列出了用于长三角土地利用变化模拟推演的五类因素(包含12个因子)。
| 类别 | 变量 | 意义 |
|---|---|---|
| 地形 | DEM | 表示地形的影响之一,DEM越低的非城市越容易转变为城市 |
| Slope | 表示地形的影响之一,可由DEM计算得到 | |
| 限制区 | Planning area | 城市空间规划,包括完全可开发、部分可开发和完全不可开发的区域 |
| 邻近性 | Neighborhood | 表示邻近性的影响,邻近土地单元间的相互作用 |
| 可达性 | A-city | 表示可达性的影响之一,具体为到地级市的距离 |
| A-county | 表示可达性的影响之一,具体为到区县的距离 | |
| A-rail | 表示可达性的影响之一,具体为到铁路的距离 | |
| A-subway | 表示可达性的影响之一,具体为到地铁的距离 | |
| A-trunk road | 表示可达性的影响之一,具体为到主干道的距离 | |
| A-main road | 表示可达性的影响之一,具体为到公路的距离 | |
| A-waterway | 表示可达性的影响之一,具体为到水网的距离 | |
| 异质性 | H-landuse | 表示异质性的影响,具体为土地利用变化率 |
表1 用于长三角城市空间推演的五类因素
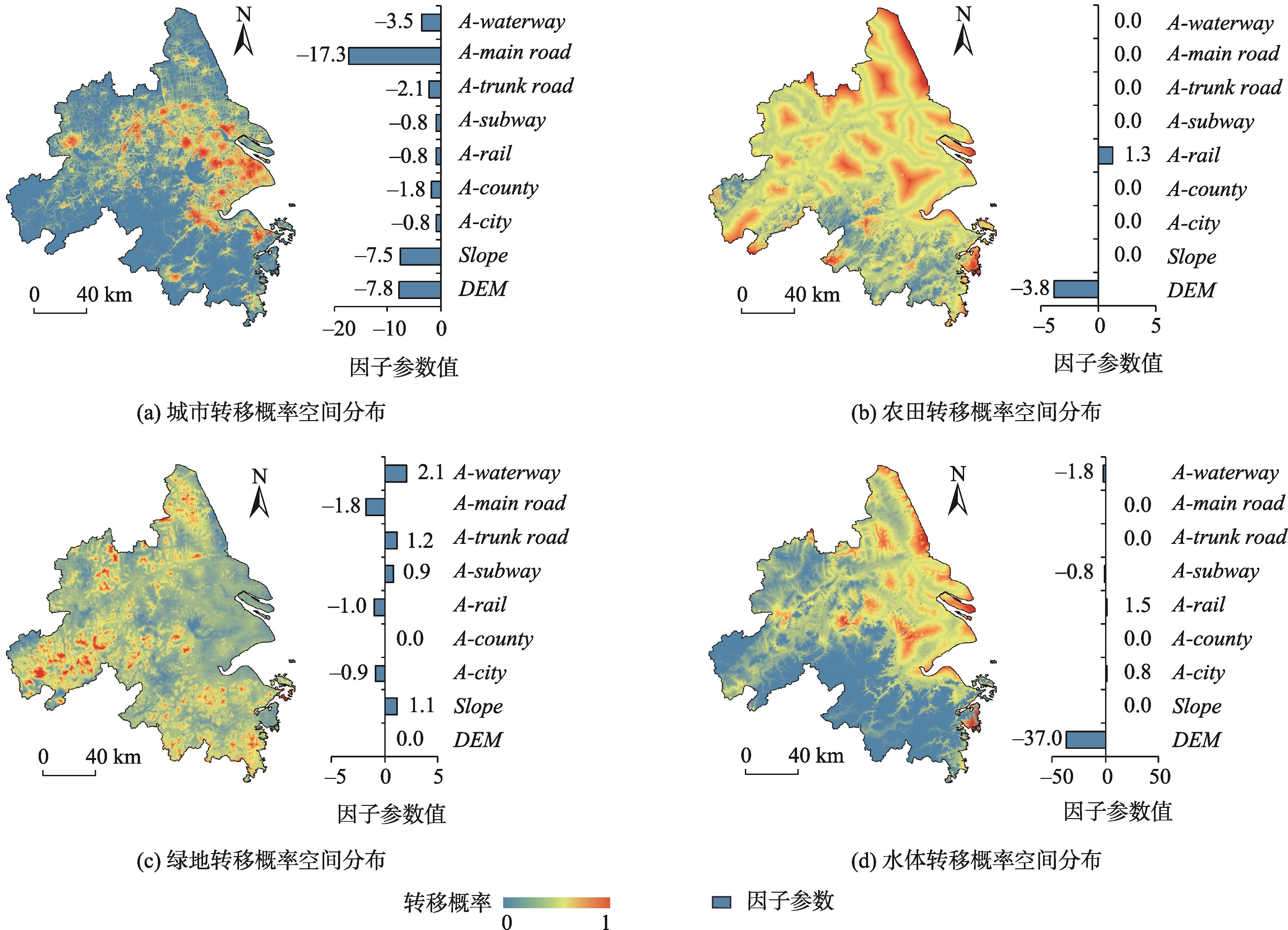
图4 基于五类因素计算的长三角土地转移概率
对长三角历史土地利用格局和相关五类因素进行规则采样并训练 TCAPH-Trans模型,目标函数的 RMSE 值为 0.05,进一步计算得到了长三角 4 种土地利用转移概率图(图4)。这些地图反映了每个单元转为不同种类土地利用类型的可能性,每种土地利用的最终驱动因子都是不同的,条形图展示了这些因子的影响作用和程度,其中因子的参数为正表示对该类土地利用变化起抑制作用,参数为负则起促进作用,绝对值越大则影响程度越大。
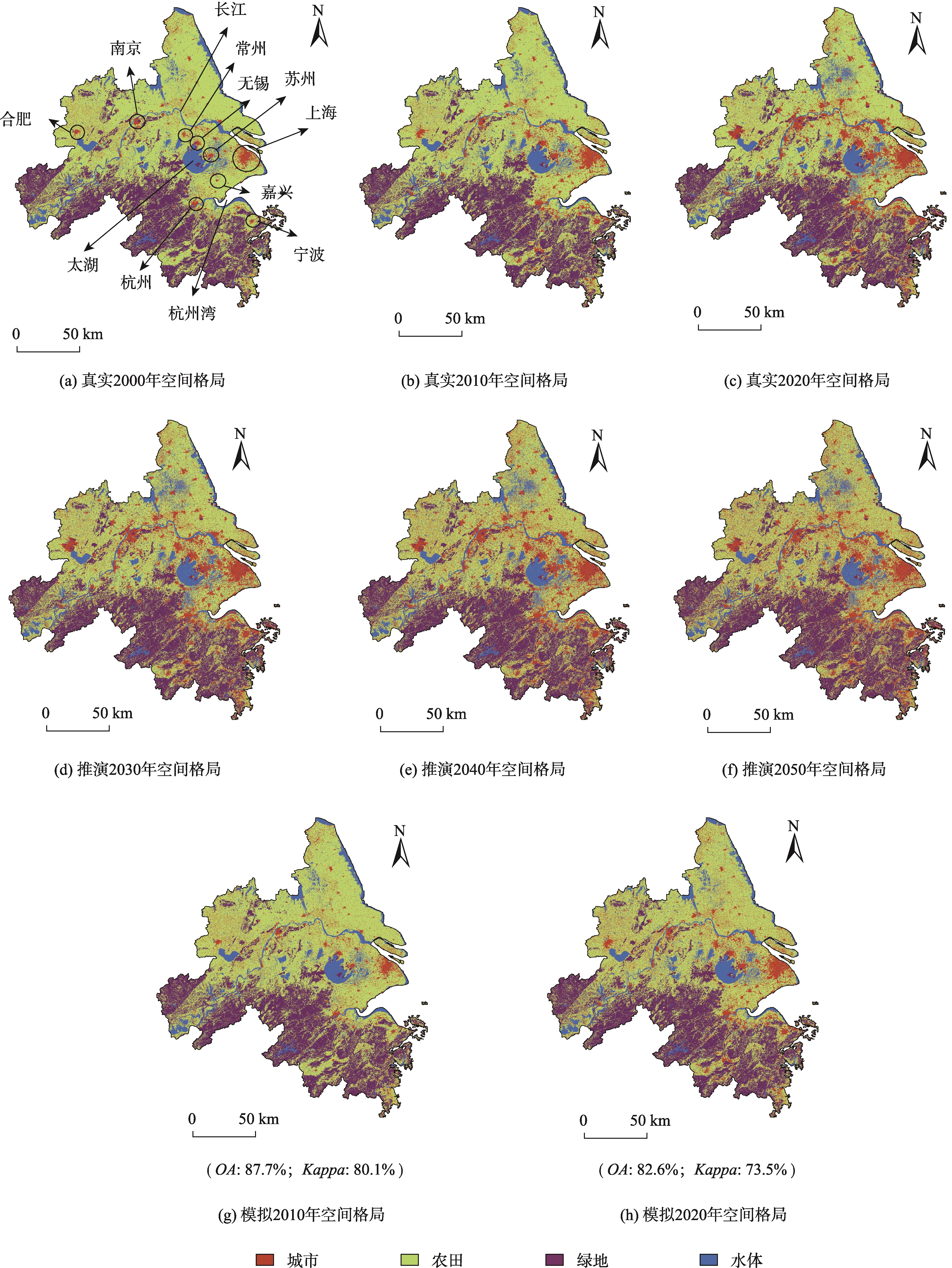
图5 基于转移概率的长三角土地利用空间格局过程模拟与未来推演
以长三角 2000 年的土地利用情景作为初始地图,以土地转移概率图为输入概率层,通过模拟 2010年的土地利用情景来校准模型参数,并通过模拟 2020 年的土地利用情景与同一年的实际土地利用情况进行验证。模拟结果与实际城市模式整体高度相似(图5),校准(2010 年)和验证阶段(2020年)的总体准确率(OA)都超过了 80%,Kappa 系数超过 70%,证明 TCAPH-Trans 方法的有效性,五类因素对于解释快速变化地区的多种土地利用变化机制具有可靠性。
3.2 基于TCAPH-Suit的月球科研站适宜选址
月球南极可能存在水冰,为月球科学研究和可持续人类活动提供理想的水资源,被视为未来建立月球科研站的关键区域。本文以月球南极的de Gerlache 附近区域作为研究区域,包含 Artemis 3任务公布的 de Gerlache 撞击坑边缘和 Shackleton连接脊等候选区域,应用 TCAPH-Suit 方法计算以水冰为首要科学目标的月球科研站选址适宜概率。
| 类别 | 变量 | 意义 |
|---|---|---|
| 地形 | DEM | 表示地形的影响之一,具体为高程 |
| Slope | 表示地形的影响之一,由DEM计算得到 | |
| 限制区 | PSR | 表示不可着陆的空间约束,具体为永久阴影区没有光照的区域 |
| 邻近性 | P-water ice | 表示邻近性的影响之一,具体为到水冰点的距离 |
| P-geological point | 表示邻近性的影响之一,具体为到地质目标点的距离 | |
| P-mineral | 表示邻近性的影响之一,具体为到目标矿物的距离 | |
| P-cold trap | 表示邻近性的影响之一,具体为到冷阱的距离 | |
| P-carter | 表示邻近性的影响之一,具体为到撞击坑的距离 | |
| 可达性 | Earth visibility | 表示可达性的影响之一,具体为平均对地通讯能力 |
| Time cost | 表示可达性的影响之一,具体为时间代价指标 | |
| Distance cost | 表示可达性的影响之一,具体为里程代价指标 | |
| Energies cost | 表示可达性的影响之一,具体为能量代价指标 | |
| 异质性 | Sun visibility | 表示异质性的影响之一,具体为年平均光照 |
| Lunar radiation | 表示异质性的影响之一,具体为月表太阳辐射 | |
| Summer temp | 表示异质性的影响之一,具体为夏季平均温度 | |
| Winter temp | 表示异质性的影响之一,具体为冬季平均温度 | |
| Geodiversity | 表示异质性的影响之一,具体为地质多样性 |
表2 用于月球科研站选址的五类因素
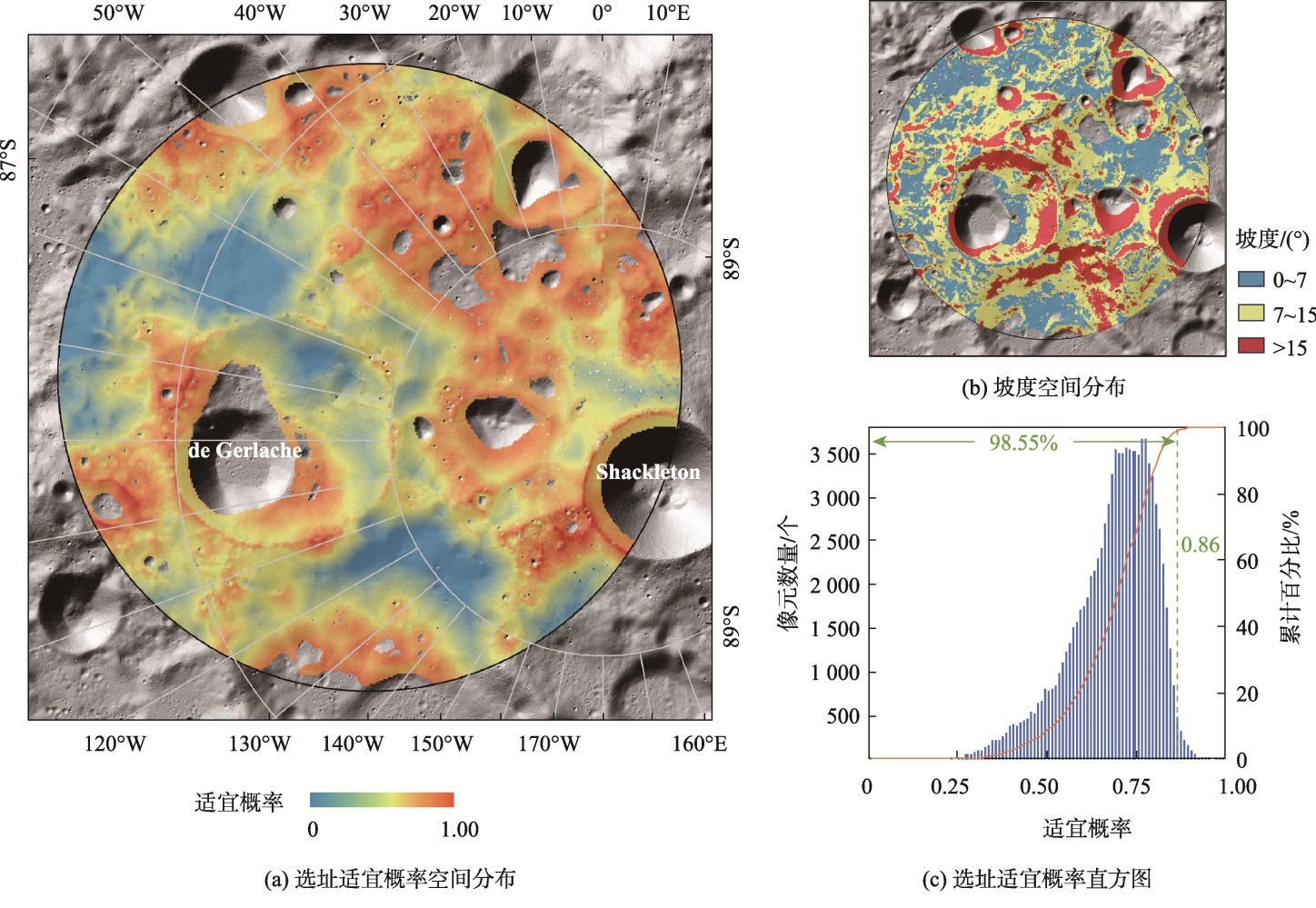
图6 基于五类因素计算的月球科研站选址适宜概率
根据专家知识和公开目标区域为已知样本训练 TCAPH-Suit 模型,目标函数的 RMSE 值低至0.08,显示出训练模型在样本数据集上的良好拟合度,表明该模型有效地捕捉了人类选址规律和经验。应用五类因素推演得到南极 de Gerlache 区域的月球科研站全局选址适宜概率,其结果如图6所示。
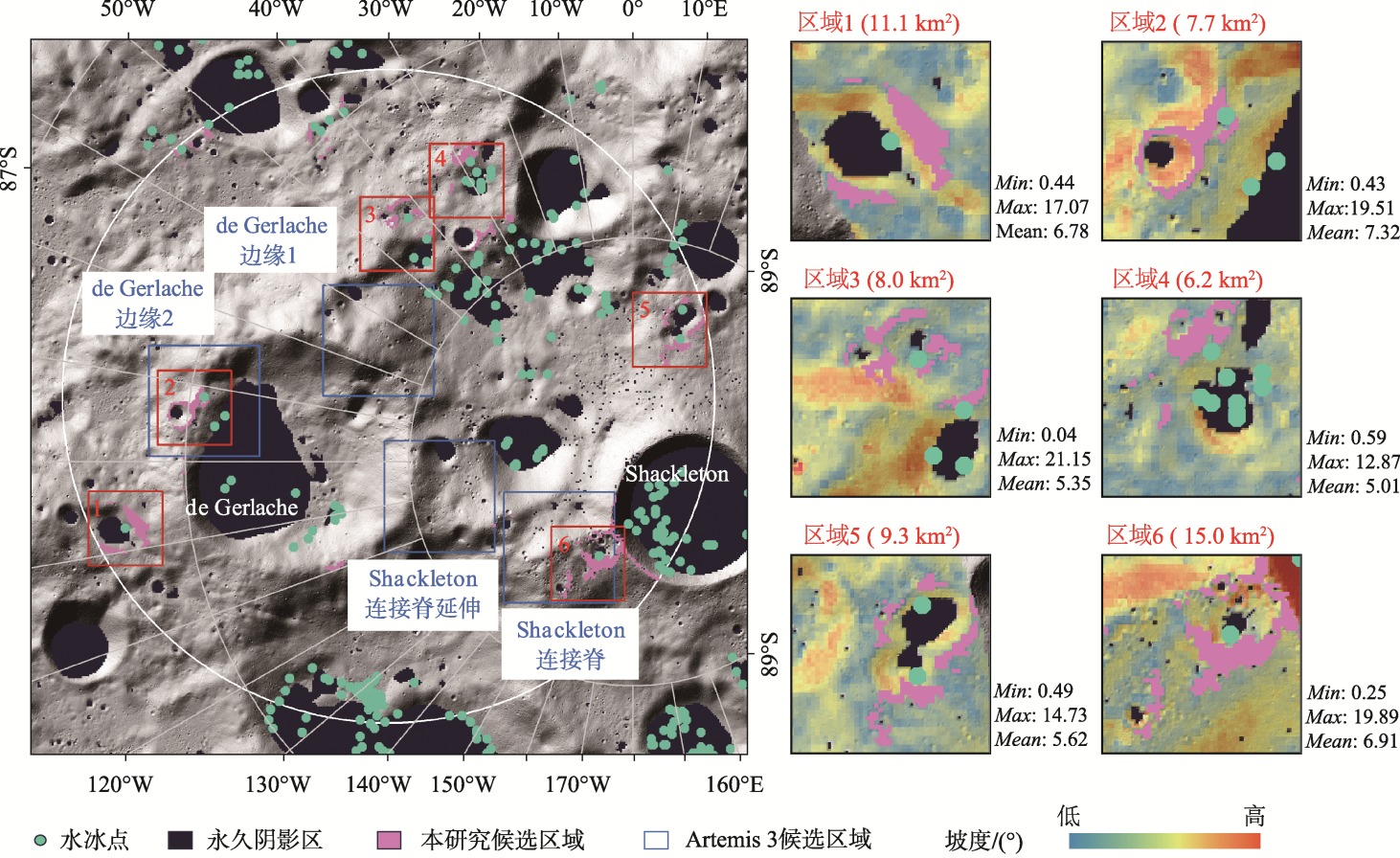
图7 基于选址适宜概率的月球科研站选址候选区域推演
基于概率阈值,计算得到 6 个高概率区域(10 km×10 km)作为候选建站区域,如图7所示。区域 1—区域 5 的地形坡度相对较为平缓,平均坡度<7°,区域内部均存在一些小型可能含水的永久阴影区。预测建站区域大致位于这些阴影区的平坦边缘,建站面积均大于 6 km2。相比之下,候选区域 6位于 Shackleton连接脊,其适宜建站的面积最大,达15 km2。区域 2 和区域 6 与 Artemis 3 任务公布的含有水冰的候选区基本是一致的,证明了 TCAPH-Suit方法推演的以水冰为主要科学目标的月球科研站适宜选址的可靠性。
讨论与结论
地表和深空天体等不同空间环境下的要素,本质上都是具有时变特性的空间实体,其空间分布具有相似性、异质性和随机性等特征,其空间格局的探测推演依赖空间分析共性理论基础。建立探测和推演空间格局的共性方法,对于了解地表和深空天体的空间要素演化、资源开发利用、设施和基地选址等不可或缺。
主要理论贡献
提出了以发生概率为核心的空间格局探测推演范式 TCAPH,充分考虑各种空间要素之间的相互作用及其影响因素,为复杂空间分布规律及演变进程分析和预测提供了解决途径。
根据提出的模型框架,进一步构建了时空演变转移推演方法和空间选址适宜推演方法,解决了情景转移概率和选址适宜概率求解的难题,实现了概率构图误差最小化的空间格局表征。
本文提出了考虑地形、限制区、可达性、邻近性、异质性五类核心因素的空间格局发生概率推演范式(TCAPH),为空间动态推演建模提供了共性框架。针对空间演变推演,以地形特征、空间规划限制、资源可达、距离邻近、要素异质为五类关键因素,提出了以转移概率为核心的空间演变推演方法(TCAPH-Trans);针对空间选址推演,以地形特征、工程限制、巡视可达、科学目标邻近、动态环境异质为五类关键因素,提出了以适宜概率为核心的选址适宜推演方法(TCAPH-Suit)。
以长三角土地利用空间格局模拟与预测,以及月球南极 de Gerlache 区域科研站适宜推演等案例应用验证了上述模型方法的有效性。案例研究表明,基于五类因素的发生概率建模方法适用于原生和衍生空间格局的分析及推演,解决了情景转移概率和选址适宜概率求解的难题,实现了概率构图误差最小化的空间格局表征与推演,可用于从地表要素到深空天体要素的多类空间实体分析与决策支持。
在未来研究工作中,将考虑开发一个集空间场景选择、空间要素分析、空间格局推演的一体化平台系统,提供实时、动态的空间格局探测和推演服务,从而拓展模型框架的应用领域。