2 研究方法
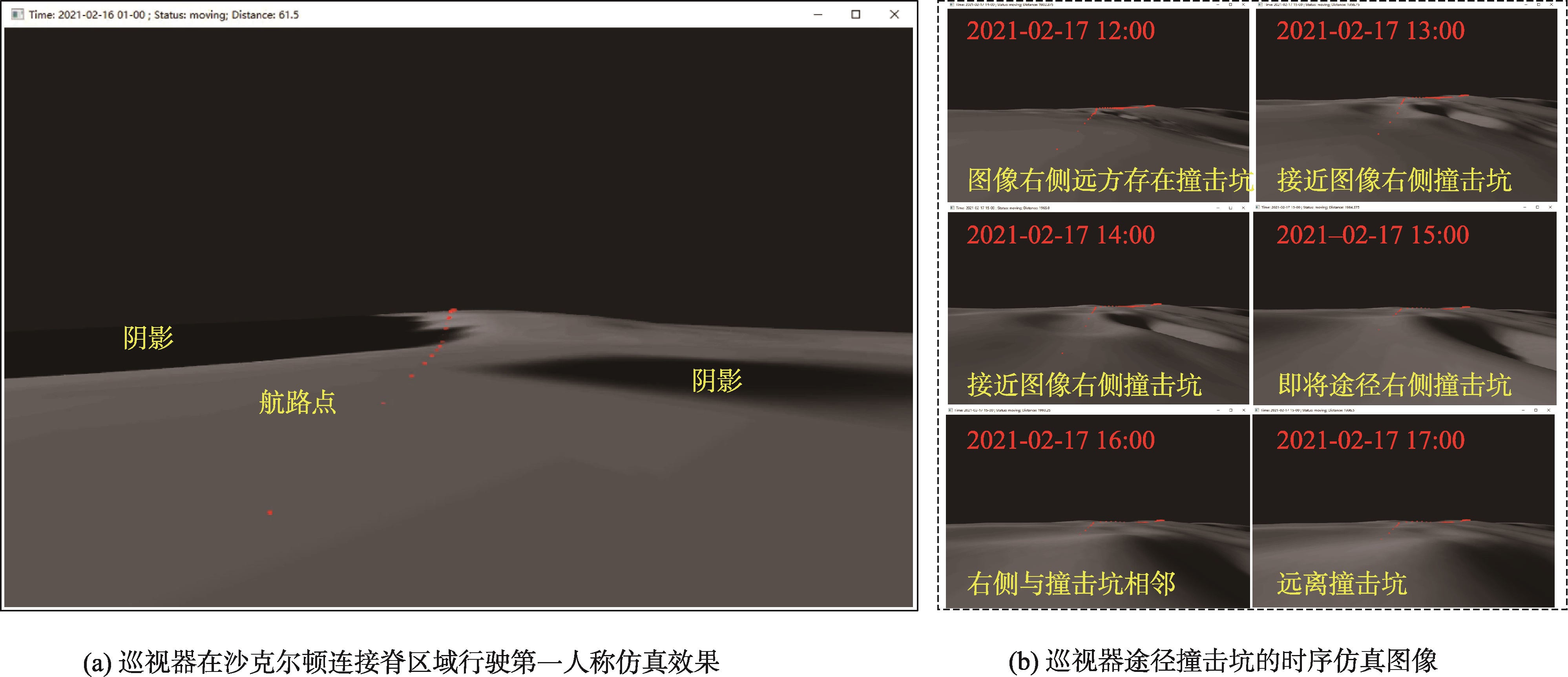
行驶路线的安全性评估重点关注沿途地形起伏、阴影区域变化和巡视器姿态突变的情况,因此月表米级分辨率地形环境可视化、月表动态光照环境可视化和巡视器探测第一人称仿真是实现巡视探测仿真的3个环节。
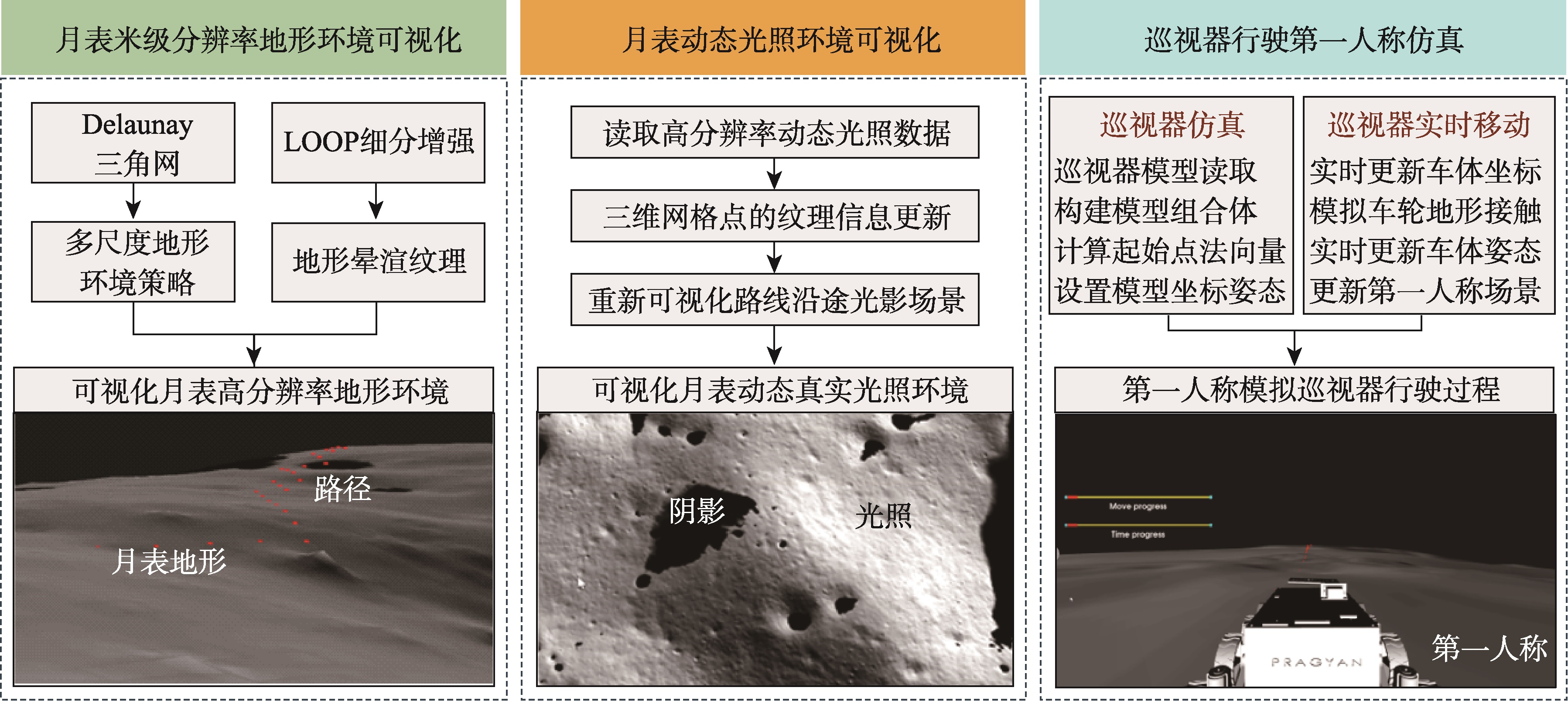
图1 月球巡视器探测三维仿真的技术框架
2.1 基于VTK的月球巡视器探测仿真模型
基于计算机图形学和图像处理技术,VTK是使用C++开发,封装OpenGL同时包括2000多类仿真函数的通用程序库。图2表达了基于VTK流程化渲染管线机制构建的月球巡视器探测仿真模型,由数据源(Source)、过滤器(Filter)、映射器(Mapper)组成,并由渲染窗口(Render Window)、渲染器(Renderer)和建模对象(Actor)组成虚拟场景渲染引擎。
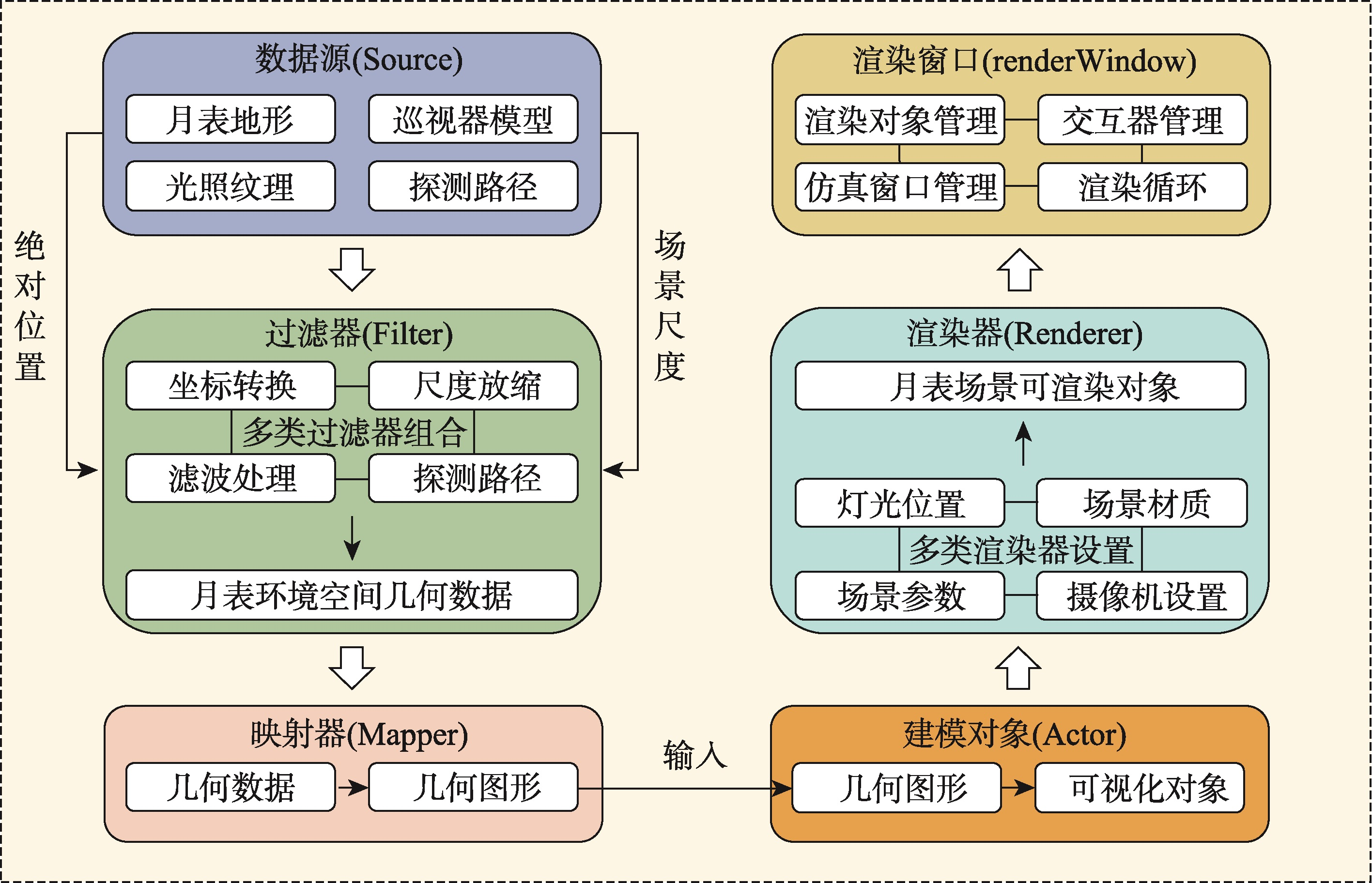
图2 基于VTK的月球巡视探测仿真模型
2.2 月表米级分辨率地形环境可视化
2.2.1 栅格地形转化为三维点
由于数据源中的月表地形数据处理量庞大,为了提升月表地形数据的渲染效率,本文将存储高程的栅格像元转化为三维坐标点。作为数据源中存储点类型的数据对象,vtkPoints点数据模型是可通过点ID访问的XYZ坐标三元数组,用于存储坐标点的平面坐标和高程值属性。
2.2.2 Delaunay三角剖分
三角剖分(triangulation)可以根据月表三维点的二维平面关系生成三角形网格,还原月表地形三维点之间的空间拓扑关系。基于数据源中的月表三维点坐标数据,采用三角剖分过滤器为月表三维点构建了最优的三角形网格,输出包含月表高程点拓扑关系的月表三角形网格数据集。为了提升月表曲面的平滑性,在过滤器中引入LOOP细分规则提升三角形网格细化效果。
2.2.3 多尺度地形可视化策略
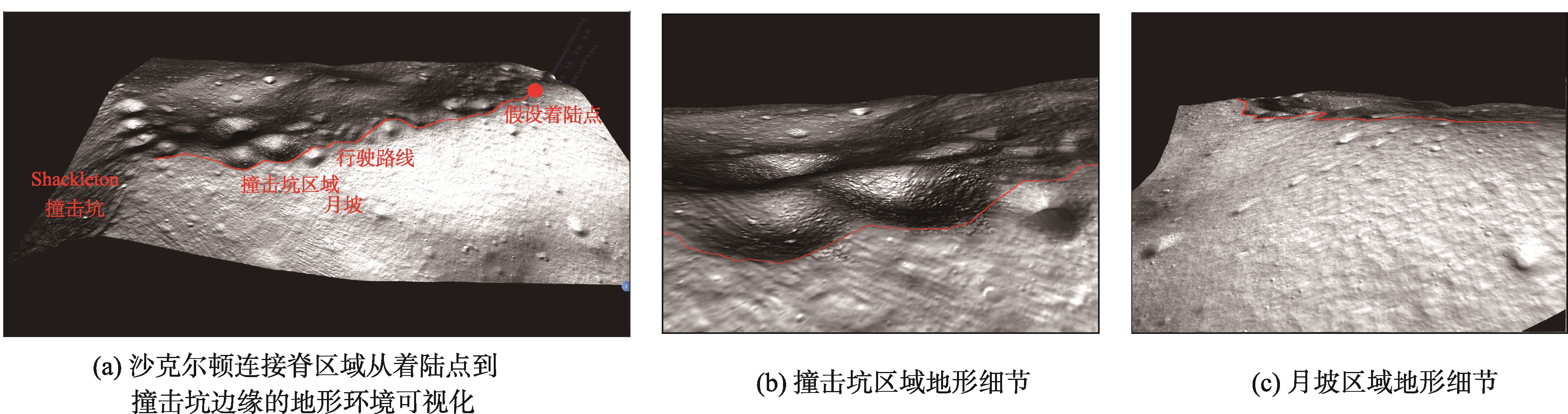
高分辨率米级地形数据为月表虚拟环境增加了撞击坑和月山等地形细节,但同样增加了地形场景逐帧更新的计算压力。考虑到仿真过程将时刻保持第一人称观察视角,仅观察到以车体为中心大小为10 m左右的局部区域。低分辨率的全局环境并不影响模拟的真实性,因此设计了多尺度的地形可视化策略。
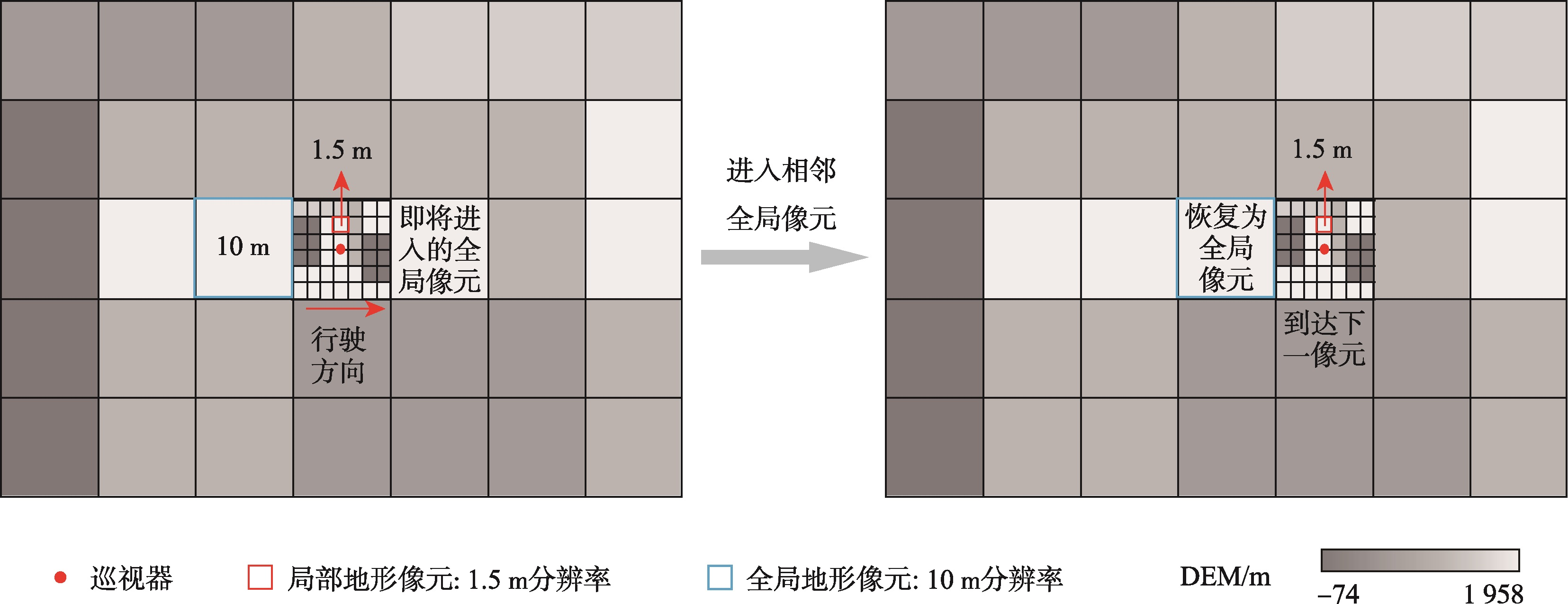
图3 多尺度地形可视化策略
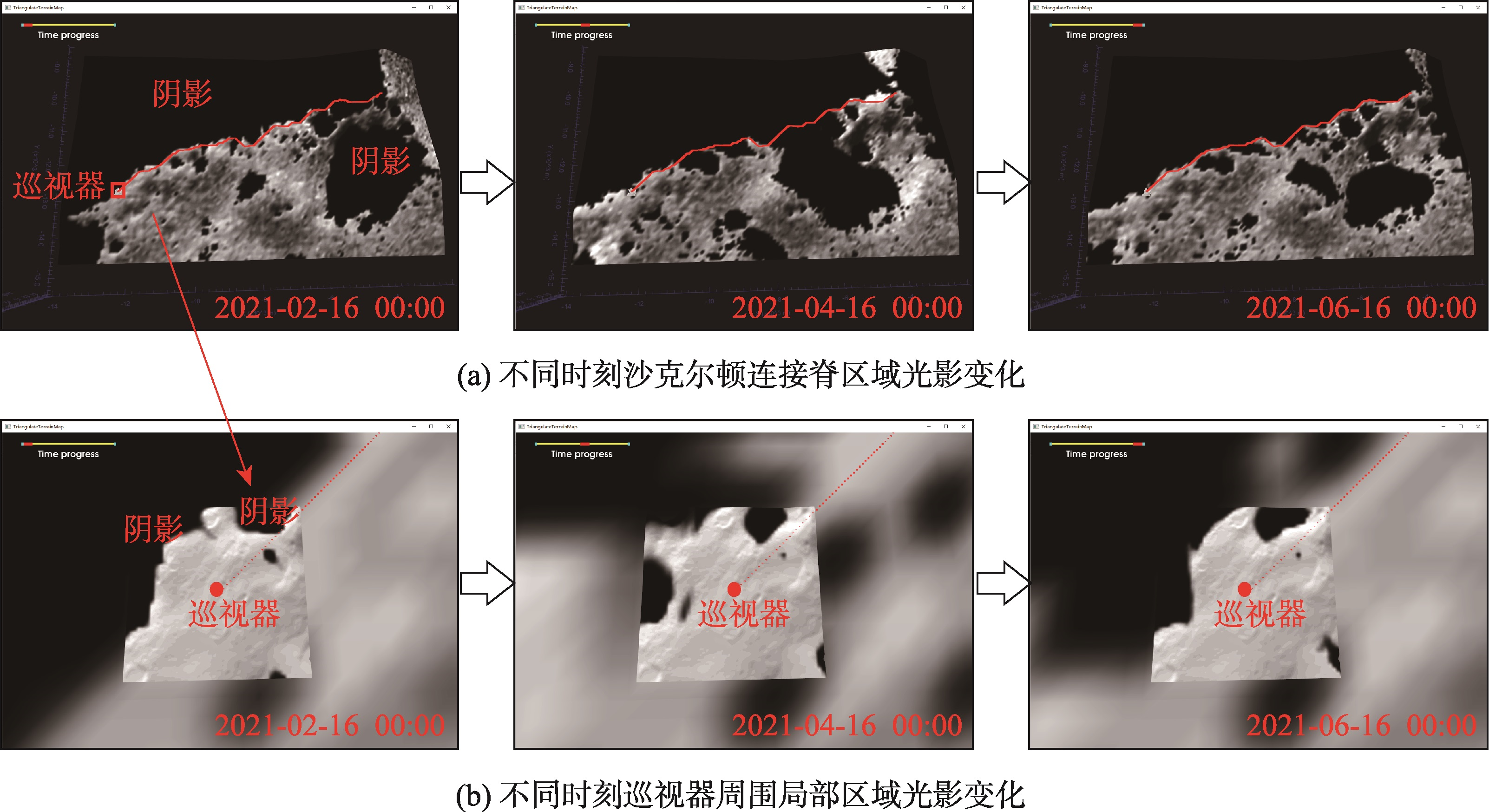
2.3 月表动态光照环境可视化
在巡视器探测月球的过程中,是否经过阴影区域直接关系到太阳能源的产出效率。为了实现巡视过程中光照环境的实时更新,在仿真系统中加入了光照环境动态更新模块。实现光照场景变化的底层策略是改变每个三维点的纹理属性亮度,考虑到地形晕渲的阴影图片可以有效表达月表光影场景,特别是产生符合人类视觉认知的月表纹理图片。
2.4 巡视器探测第一人称仿真
在虚拟月表环境中可视化巡视器模型包括模型初始化和探测过程位姿自动更新两部分。本文构建的巡视器三维模型包括主车体、连接臂、舵机架、太阳能板和刚性车轮,模型设计尺寸为长(1.5 m)、宽(0.8 m)、高(1 m),由42个模型文件组成。
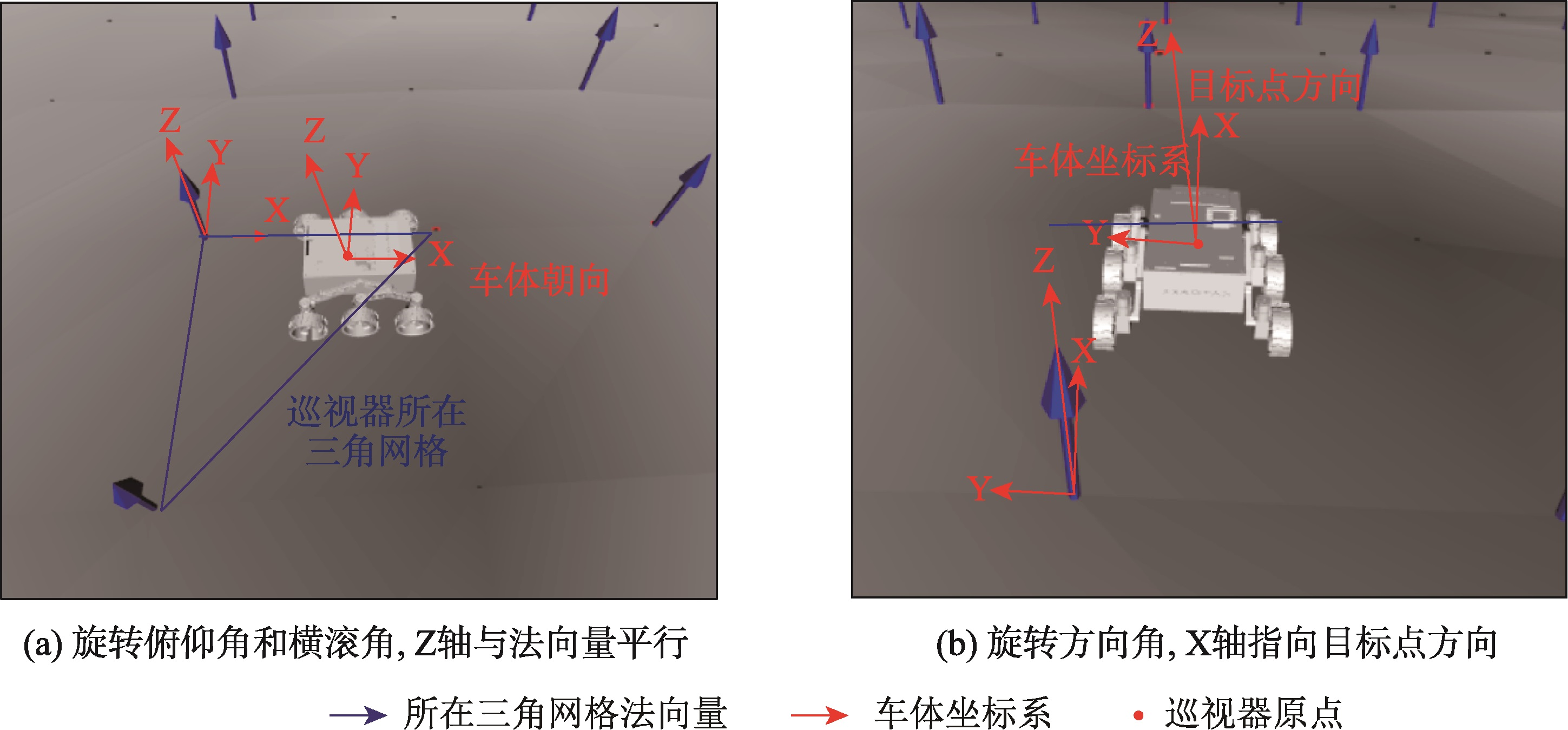
图4 基于月表法向量的巡视器姿态更新流程