1 引言
在农业生产和土壤管理中,土壤质地是评估耕地质量和作物适宜性的重要指标。土壤质地含量通常指的是土壤中不同粒径颗粒的比例,通常分为3类:大颗粒如砂粒(Sand: 0.050~2.000 mm),中等颗粒如粉粒(Silt: 0.002~0.050 mm),细小颗粒如黏粒(Clay: <0.002 mm)。砂粒土壤结构松散、排水快但易干燥,粉粒土壤保水性和透气性较好,黏粒土壤颗粒细小、虽保水性能好但透气性差。土壤中这3类颗粒的相对比例直接影响其排水性、透气性和养分的保持能力。
现代农业的发展对土壤质量提出了更高的要求,精确的土壤属性估算对于实现精准农业管理和提高土地利用效率至关重要。然而,传统的土壤质地测定方法主要依赖于大量的田间采样和实验室分析,这不仅耗时费力,而且难以满足大规模农业生产对实时数据的需求。因此,快速、高效、准确地获取田间土壤质地信息已成为精准农业管理的重要内容之一。
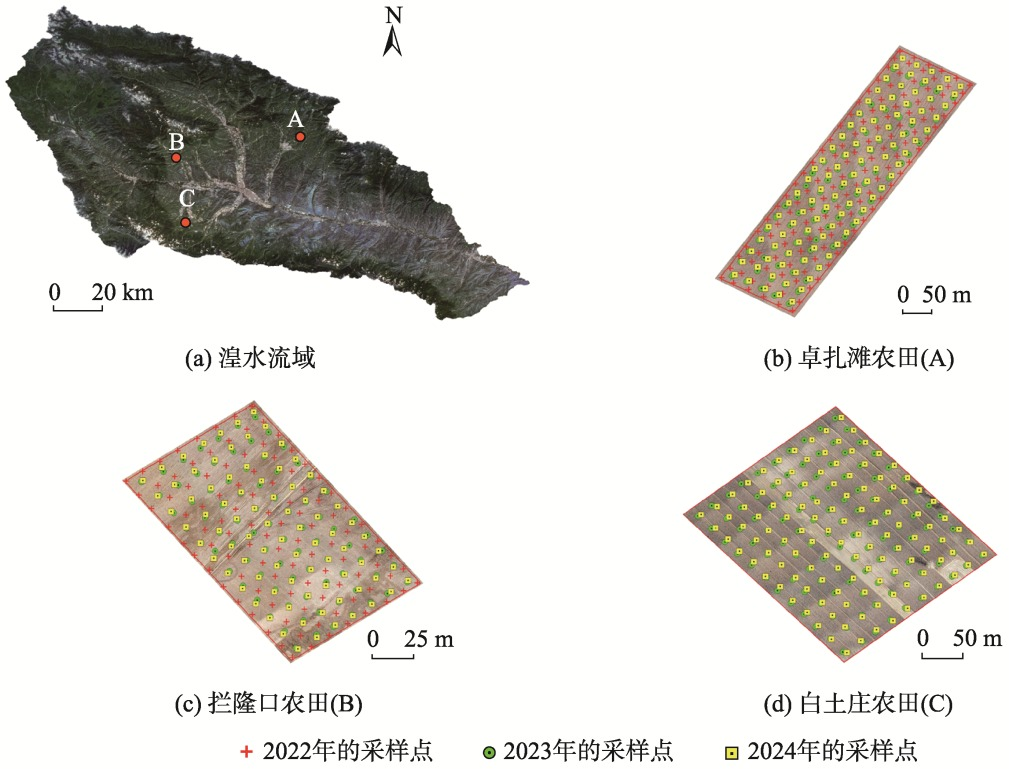
图1 湟水流域研究区位置及采样点分布
卫星遥感技术在土壤质地监测中发挥了重要作用。卫星遥感具有覆盖范围广、重访周期短、较高分辨率、多平台、时效性强和数据获取方便等优势,成为获取土壤属性信息的主要手段,大大减少了传统人工采样调查研究的工作量。随着遥感技术的不断发展,使得快速、无损、便捷地获取土壤信息成为了可能。特别是高光谱遥感技术由于其分辨率高、图谱合一的优点,在土壤质地估算研究中得到了广泛应用。
无人机高光谱遥感技术以其高空间分辨率、强光谱分辨率、连续波段覆盖和能够自主选择飞行时间的优势,能够精确获取目标田块的高光谱影像,从而实现对土壤质地的实时精准监测。相比于无人机,对于小面积的田块,卫星遥感能够一次性覆盖整个区域,而不需要多次飞行和对影像进行拼接处理,并且卫星影像数据可以直接通过相关服务平台获取,无需现场操作,减少了人为干预和技术复杂性,避免了无人机多次飞行的成本和时间投入,提供了一种更经济高效的监测手段。无人机和卫星遥感技术在土壤质地监测中各有优势,能够在田间尺度上实现高效、精准的土壤质地估算。
本研究以青海湟水流域3个典型田块为研究对象,分别利用无人机与卫星遥感影像数据,通过对多种遥感数据的精度差异分析与验证,进一步探讨小尺度土壤质地估算的适用性与潜力,为精准农业和土壤管理提供技术支持。
2 研究区概况及研究方法
2.1 研究区概况
本研究选择青藏高原东北部湟水流域(36°02' N—37°28' N, 100°42' E—103°04' E)的卓扎滩、拦隆口和白土庄3个田块作为研究区。研究选择的3个田块位于湟水流域黄土丘陵河谷平原区,分别种植马铃薯、燕麦和蒜苗,涵盖了区域内主要农作物和土壤类型(黑钙土和栗钙土),具有典型性和代表性。湟水流域地势整体呈西北高东南低,海拔范围为1 655~4 860 m,属高原干旱、半干旱大陆性气候,年均气温2.5~7.5 ℃,年降水量350~600 mm。
通过实地调研,在流域内选定3块地势平坦、地块面积较大的农田作为土壤采样区,避开沟渠与道路。3块农田分别位于互助县卓扎滩村(A: 4 ha,100 m×400 m)、湟中县拦隆口镇(B: 3.36 ha,140 m×240 m)和湟中县白土庄村(C: 4.8 ha,200 m×240 m)。其土壤类型分别为黑钙土(卓扎滩和拦隆口农田)和栗钙土(白土庄农田)。
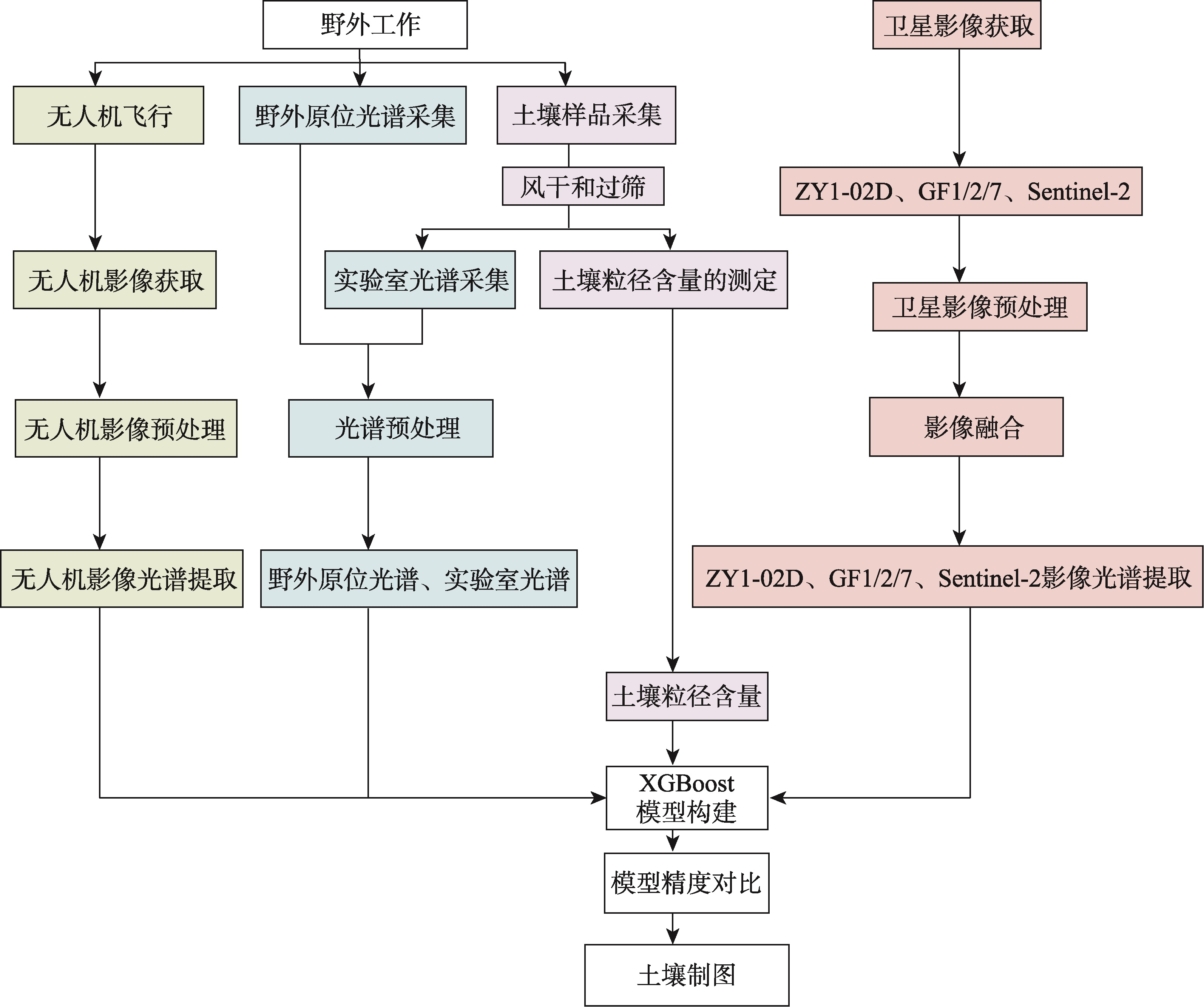
图2 基于无人机和卫星遥感的土壤质地含量估算技术路线
2.2 数据获取
无人机影像获取
无人机飞行选择在晴朗、无云、无积雪覆盖且地面风力小于三级的天气条件下进行,时间安排在北京时间11:00~15:30。飞行平台采用大疆M600 Pro无人机,搭载2台高光谱相机:一台覆盖400~1 000 nm波段的可见光-近红外相机(Resonon Pika L),另一台覆盖1 000~1 700 nm波段的近红外相机(Near-Infrared Reflectance-640)。
野外原位光谱与土壤样品采集
野外原位光谱采集在无人机飞行后进行。采集前,在每个采样点制作50 cm×50 cm的样方框,清除表面杂物及根系,并平整土壤表面。使用美国ASD FieldSpec 4地物光谱仪(光谱范围350~2 500 nm),通过手柄将手持裸光纤垂直对准样方框中心土壤表面,距离地面约15 cm,从样方框4条边对应的4个方向测定光谱反射率且各方向间夹角为90°,每个方向测定5条光谱共获取20条光谱,作为该点的原位光谱数据。
实验室光谱采集
将野外采集的土壤样品带回实验室,并按采样点编号顺序排列,自然风干晾晒。样品风干后,研磨且依次通过10目(2 mm)和20目(1 mm)筛子。10目样品用于实验室光谱测定,20目用于后续土壤粒径测定。光谱采集时,首先将2 mm土样装入直径10 cm、高度1.5 cm的黑色盛样皿中,并用直尺刮平表面,然后使用ASD FieldSpec 4地物光谱仪配备的高密度反射探头对样品进行光谱测定。
土壤粒径含量的测定
土壤粒径成分测定利用过1 mm筛的土样进行。称取约0.45 g土样放置于50 ml烧杯中,加入10 ml浓度为10%的H2O2。将烧杯置于加热板上,温度控制在100~150 ℃,加热过程中用洗瓶冲洗烧杯内壁以保证完全反应。反应结束后,加入10 ml浓度为10%的HCl,继续加热以去除CaCO3,直至液体从沸腾转为静止。利用Master Sizer 2000激光粒度仪测定样品粒径。
卫星影像获取
由于卫星影像获取时间难以与土壤采样时间完全一致,本研究选择尽量接近采样时间且目标农田区域内无云覆盖的影像数据。研究使用的影像数据包括GF1、GF2、GF7、ZY1-02D和Sentinel-2影像。GF1/2/7与ZY1-02D影像由青海省自然资源遥感中心提供,Sentinel-2影像从欧洲航天局网站下载。
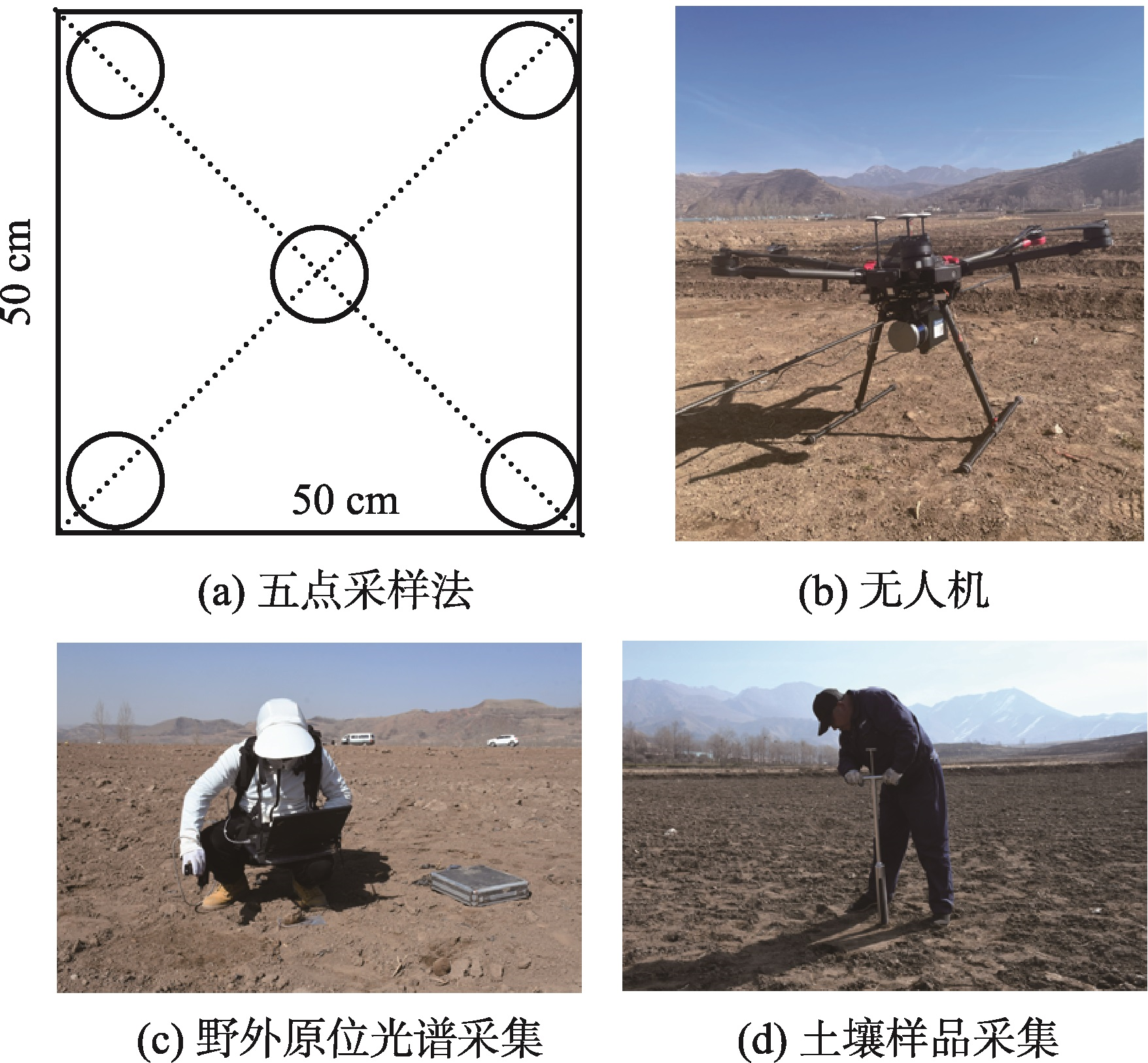
图3 样品采集的方法及野外工作照
2.3 数据预处理
数据预处理主要包括三个方面:野外原位与实验室光谱预处理、无人机影像预处理和卫星影像预处理。
野外原位与实验室光谱预处理
使用ASD FieldSpec 4光谱仪和ViewSpecPro 5.6.8软件处理野外和室内光谱数据。首先剔除异常光谱曲线,对每个样点进行"陡坎"校正并计算算术平均,生成最终光谱并导出。随后,使用Unscrambler 10.4软件中的Savitzky-Golay 7点移动加权平滑法进行降噪处理,剔除350~399 nm和2 401~2 500 nm波段的噪声数据,保留400~2 400 nm的有效光谱波段。
无人机影像预处理
首先,使用Sbgcenter 4.3软件查看无人机影像的航线,并导出有效航线至Omap 8.7.3软件,根据研究区边界裁切。接着,利用AirlineDivision 1.8.0软件对高光谱影像进行预切割,获得完整的研究区影像。随后,在MegaCube 2.8.2软件中进行辐射定标和大气校正,并将校正后的影像导入ArcGIS 10.2进行地理配准与拼接。
卫星影像预处理
为提高影像空间分辨率,本研究采用Gram Schmidt Pan Sharpening对ZY1-02D高光谱影像与全色影像进行融合,并对GF1/2/7影像的全色与多光谱影像进行融合。所有影像在ENVI 5.6.2软件中使用NNDiffuse Pan Sharpening功能融合。对于Sentinel-2影像,使用Sen2Cor插件将原始L1C级产品转换为L2A级产品。
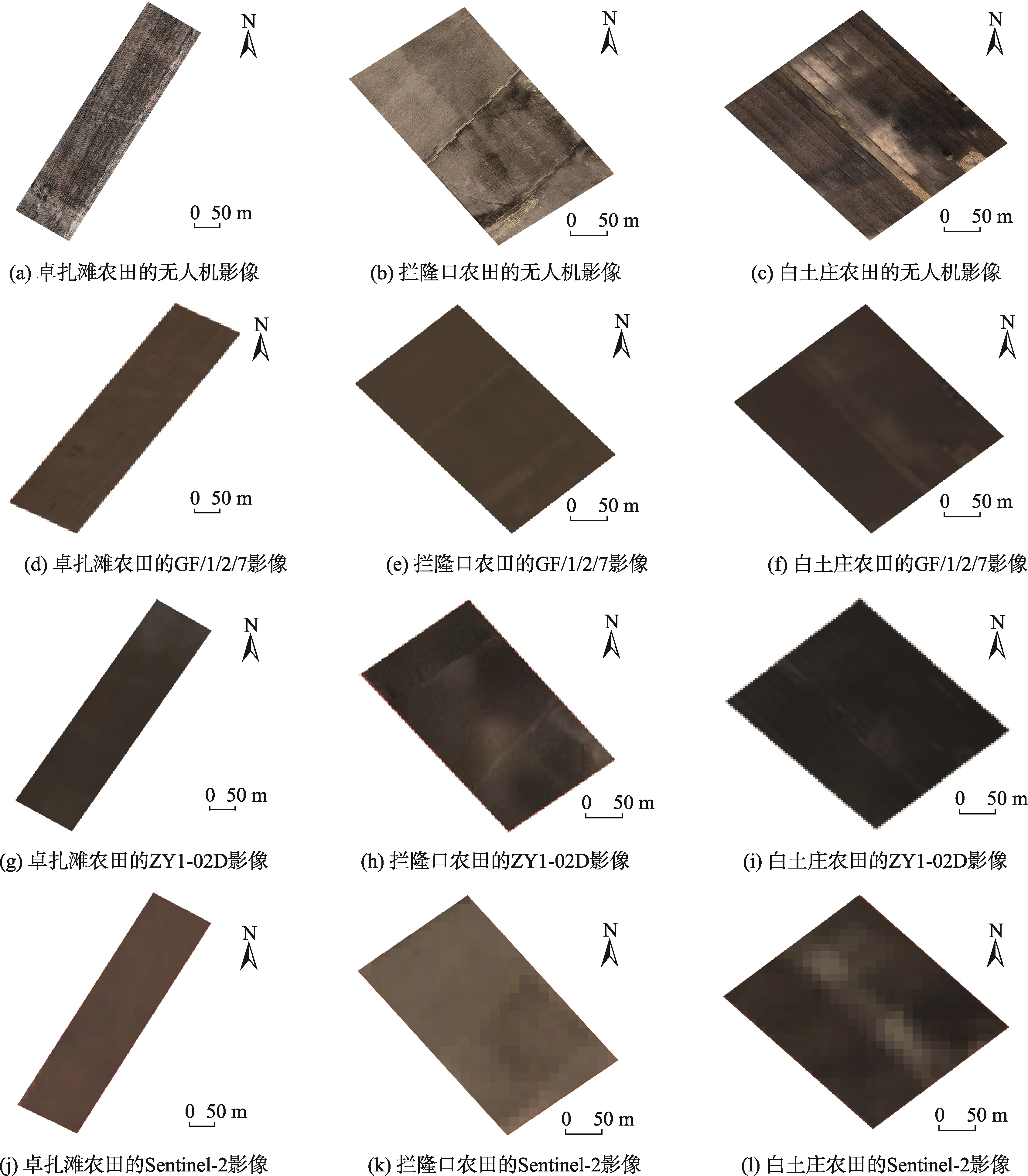
图4 各影像的预处理结果
2.4 建模方法及评价指标
本研究采用了Extreme Gradient Boosting (XGBoost)作为建模方法。XGBoost是一种基于决策树的集成学习模型,是梯度提升树的改进版本。它通过将目标函数的泰勒展开至二阶,能够更清晰地表达目标函数。XGBoost不仅可以处理非线性问题,还能通过特征的重要性排序来解释模型。它的训练效率高,能够降低过拟合风险,且具有较强的泛化能力。
评价指标选用决定系数R2(Determination Coefficient)、均方根误差RMSE(Root Mean Square Error)和相对分析误差RPD(Relative Percent Deviation)3个指标。其中R2的范围为0~1,其数值越接近1,表明模型的精度越高;RMSE的数值越小,表明预测值与真实值越接近,模型的精度越高。根据Chang等对RPD的分级标准,当RPD≥2时,模型具有较好的估算能力;1.4≤RPD<2时,模型只能进行粗略估算;而RPD<1.4时,模型的预测能力较差,无法有效估算。
3 结果与分析
3.1 土壤质地含量的统计分析
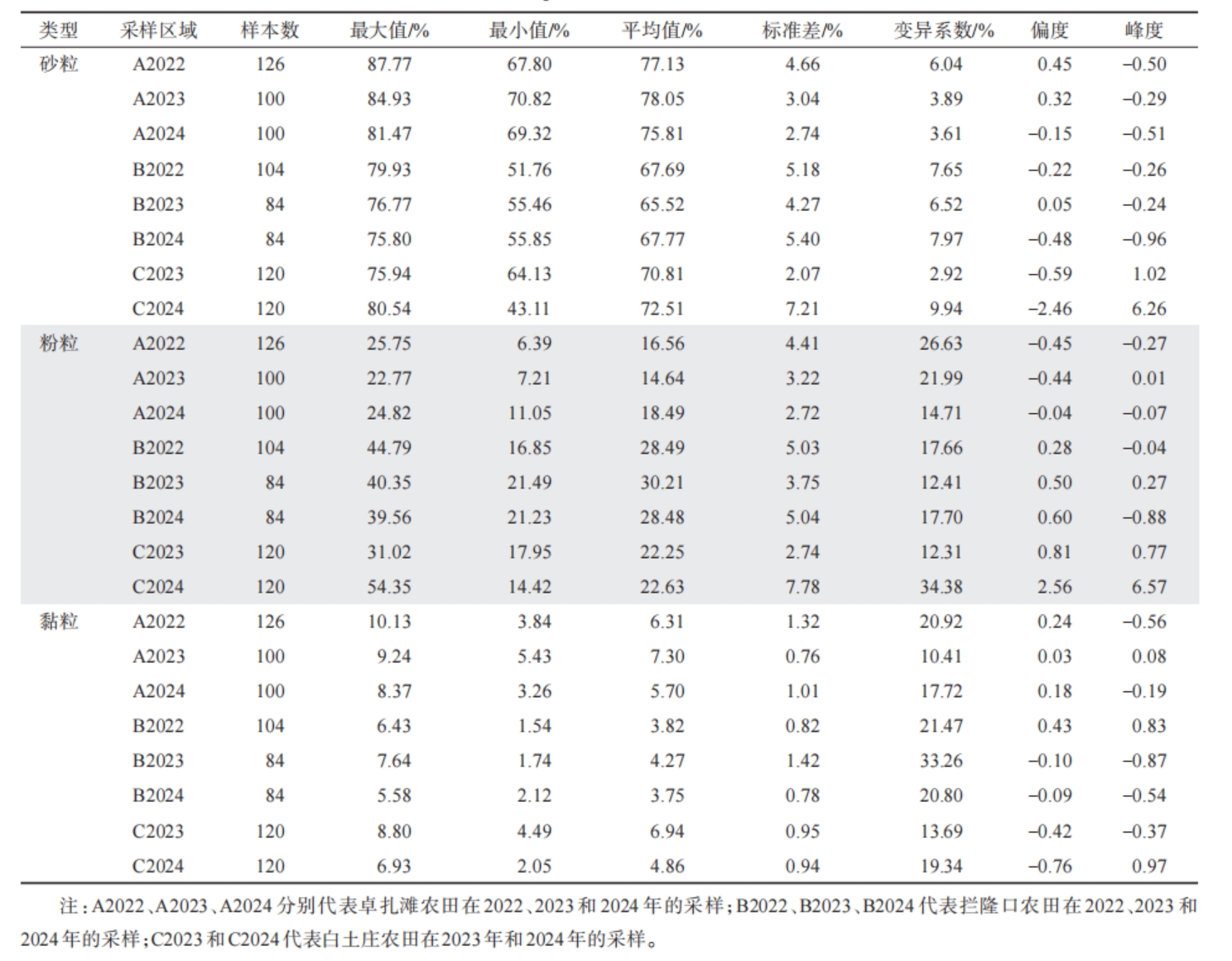
各田块土壤质地含量的统计分析结果显示,3个田块中砂粒、粉粒和黏粒的含量变化范围分别为51.76%~87.77%、6.39%~54.35%和1.54%~10.13%,平均含量为71.91%、22.72%和5.37%,表明研究区的土壤质地主要为砂质壤土。进一步分析显示,尽管土壤质地以砂粒为主,但不同田块之间的含量差异显著,可能与土壤的水文条件、土地利用方式等因素有关。
从变异性分析来看,3个田块的砂粒、粉粒和黏粒的标准差和变异系数分别为4.32%、4.34%、1.00%和6.07%、19.72%、19.70%,其中砂粒变异较小,呈现出较为均匀的分布,而粉粒和黏粒则具有较大的变异性。这表明研究区的土壤质地在细粒成分上的变化较大,可能与土壤的形成过程及其受自然条件的影响有关。
表1 土壤质地的描述性统计
3.2 光谱特征分析
本研究中,实验室光谱、野外原位光谱、无人机影像光谱、GF1/2/7影像光谱、ZY1-02D影像光谱和Sentinel-2影像光谱的反射率曲线显示,6种光谱中,实验室和野外原位光谱的反射率值最高,达0.45,且整体高于无人机和卫星影像光谱。这表明,实验室和野外原位光谱受环境因素的干扰较少,能够更准确地反映土壤的光谱特征。
在光谱的波段分布上,所有光谱数据在400~1 000 nm范围内反射率上升较快,而在1 000~2 000 nm范围内增幅趋缓。特别是在2 000 nm后,反射率显著下降,并在1 400、1 700和1 900 nm处形成典型的水汽吸收谷。相比之下,无人机和ZY1-02D影像光谱受大气和环境影响较大,尤其在1 000 nm和1 700 nm附近出现明显波动,且光谱中噪声较为显著,这表明高光谱影像在此类波段的稳定性较差。
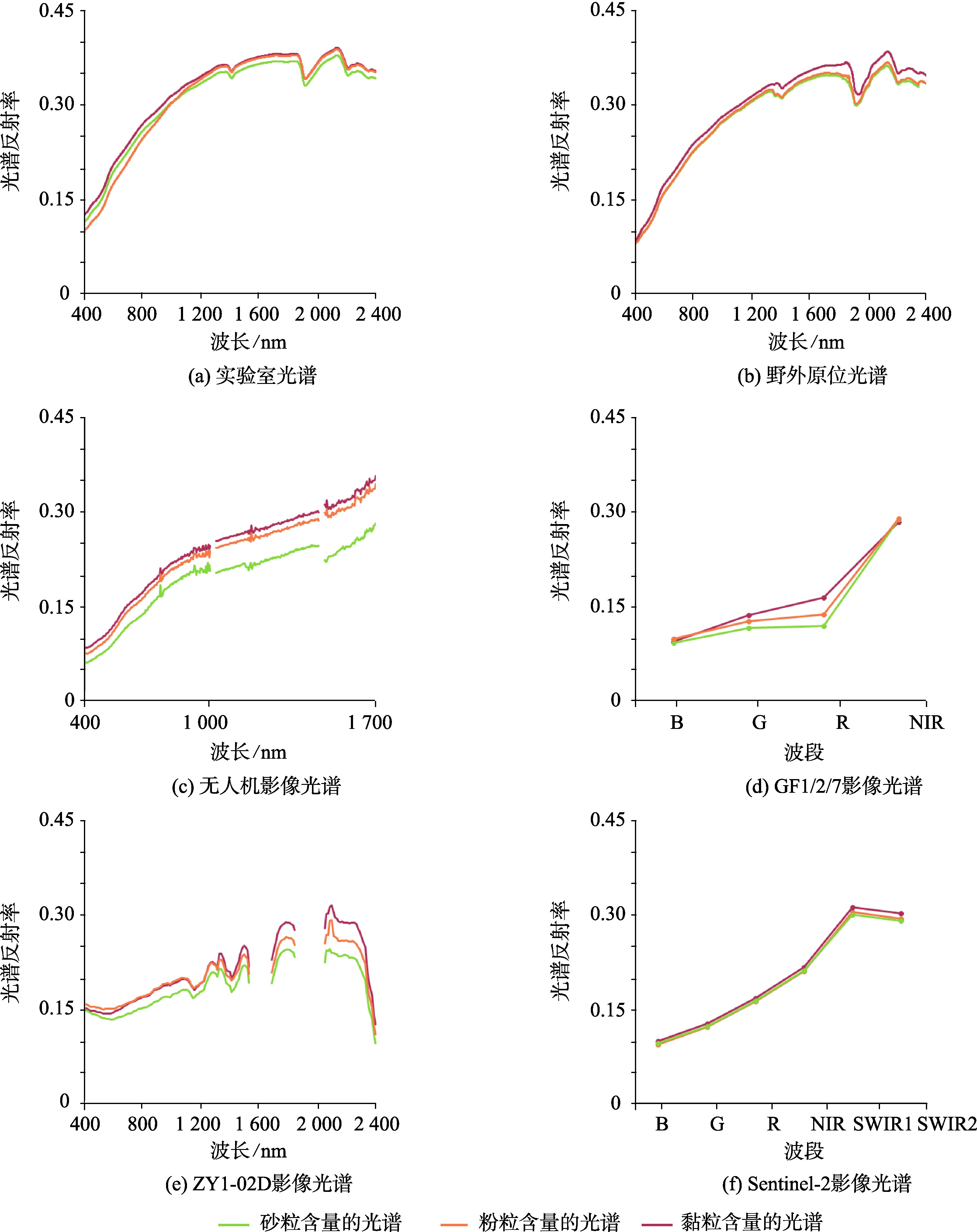
图5 光谱反射率曲线图
3.3 相关性分析
为了减少光谱数据冗余并有效选择特征波段进行建模,本研究对6种土壤光谱反射率与砂粒、粉粒和黏粒含量进行了相关性分析。结果显示,砂粒和黏粒含量与土壤光谱呈负相关,粉粒含量与光谱呈正相关,这与土壤物理特性相关:砂粒含量较高时,光谱反射率较低,而黏粒含水量较高,反射率较高。
实验室光谱的相关系数波动最小,受环境干扰最小,反映了其较为稳定的特性。相比之下,野外原位光谱波动较大,可能与现场环境变化(如气候和土壤湿度)有关。无人机和ZY1-02D影像光谱的波动较大,受大气和环境因素影响较显著。
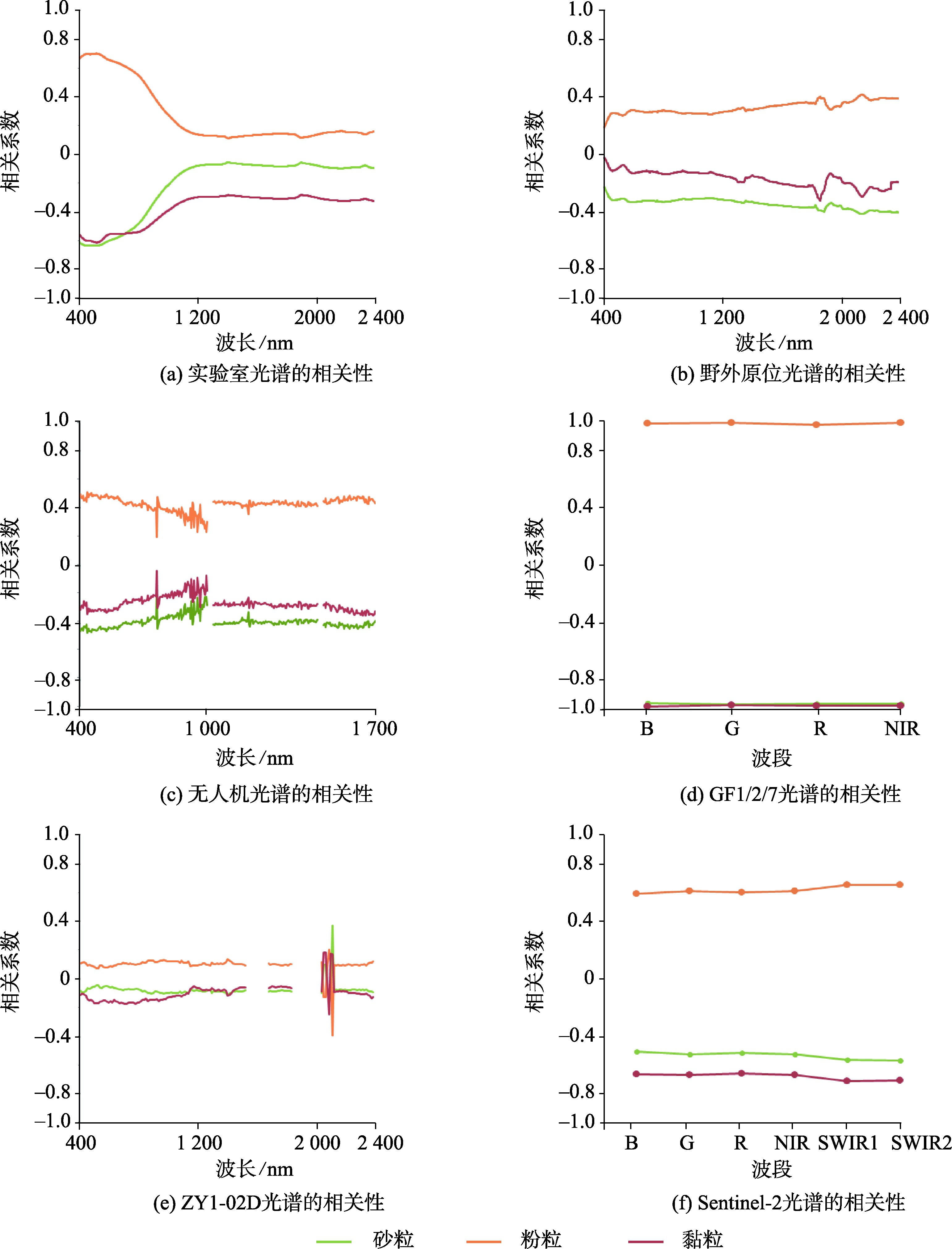
图6 土壤光谱反射率与质地含量之间的相关性分析
3.4 特征波段选择
土壤颗粒组成通过影响孔隙结构和保水性,间接调节水分和有机质含量,这些因素在高光谱的特定波段(如1 400 nm和1 900 nm的水分吸收带及可见光区域的有机质吸收特性)表现出显著的响应。本研究采用相关系数分析进行特征波段筛选,计算各光谱波段与土壤砂粒、粉粒、黏粒含量之间的皮尔逊相关系数,筛选出显著相关波段(p < 0.05),剔除低相关波段以降低维度。
分析结果表明,土壤质地的特征波段主要集中在近红外区域(780~2 400 nm)。重要性指数大于1的波段被选为特征波段,其中近红外波段的重要性显著高于可见光区域,表明土壤质地对近红外波段更加敏感。因此,无人机影像建模优先采用1 000~1 700 nm的NIR波段数据进行估算。
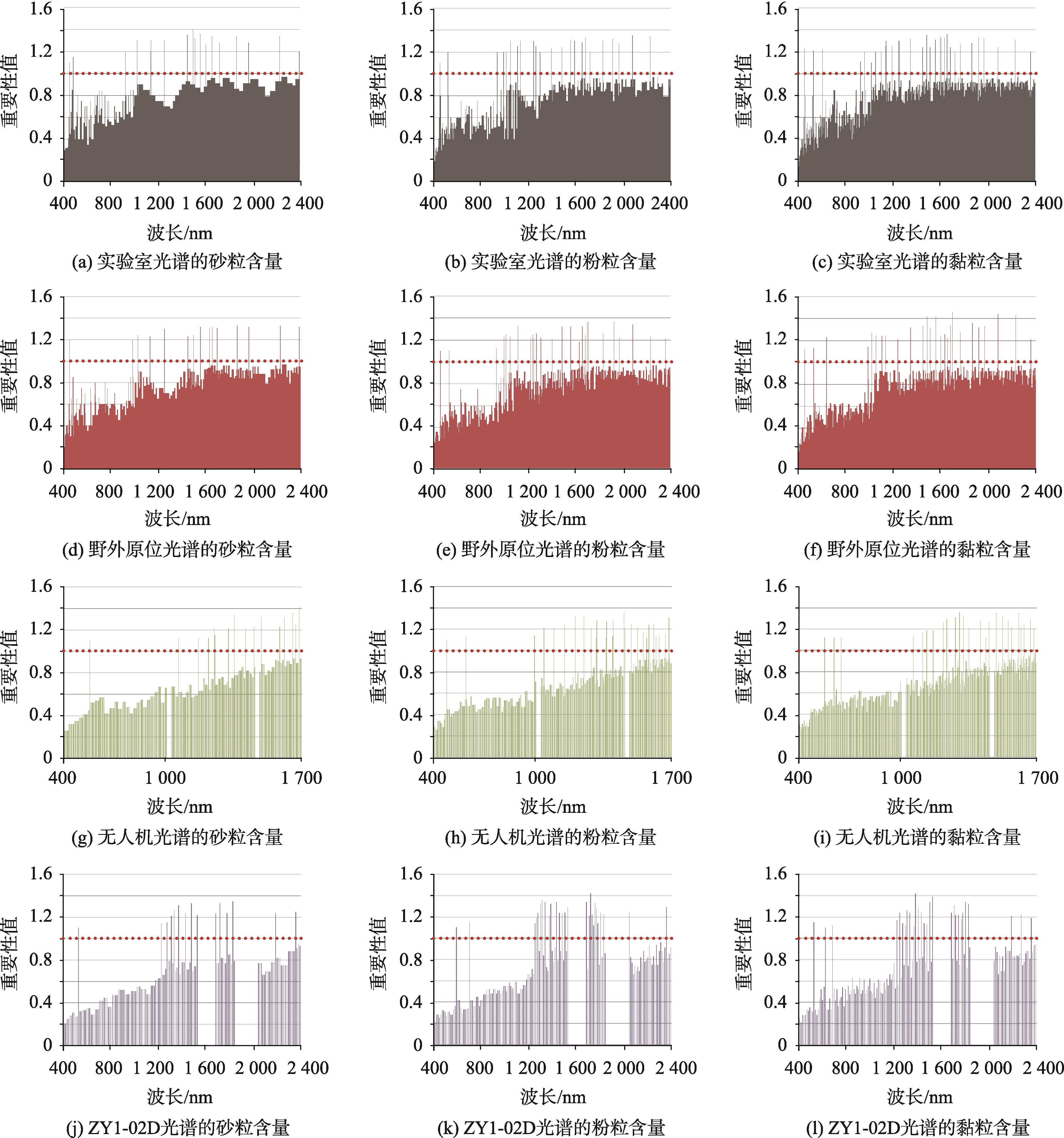
图7 波段重要性分析
3.5 土壤质地含量的建模与估算结果分析
本研究使用XGBoost建模方法,分别为各田块的砂粒、粉粒和黏粒含量建立了与6种土壤光谱的统计模型。总体来看,砂粒含量在R2cal、R2val和RPD中的数值最低,粉粒含量次之,而黏粒含量的数值最高。这表明砂粒含量的整体估算精度最低,粉粒含量次之,黏粒含量的估算精度最高,黏粒含量的实验室光谱最高精度R2cal为0.82、RMSEcal为3.58、R2val为0.80、RMSEval为3.60、RPD可达2.70。
从每张子图的细节来看,R2cal、R2val和RPD结果显示,从实验室光谱到Sentinel-2光谱,模型精度逐渐降低;而在RMSEcal和RMSEval的结果中,模型精度则呈现出依次增加的变化趋势。R2和RPD值越高、RMSE值越低则表明模型精度越高。因此,6种土壤光谱的模型精度表现为:实验室光谱 > 野外原位光谱 > 无人机光谱 > GF1/2/7光谱 > ZY1-02D光谱 > Sentinel-2光谱。
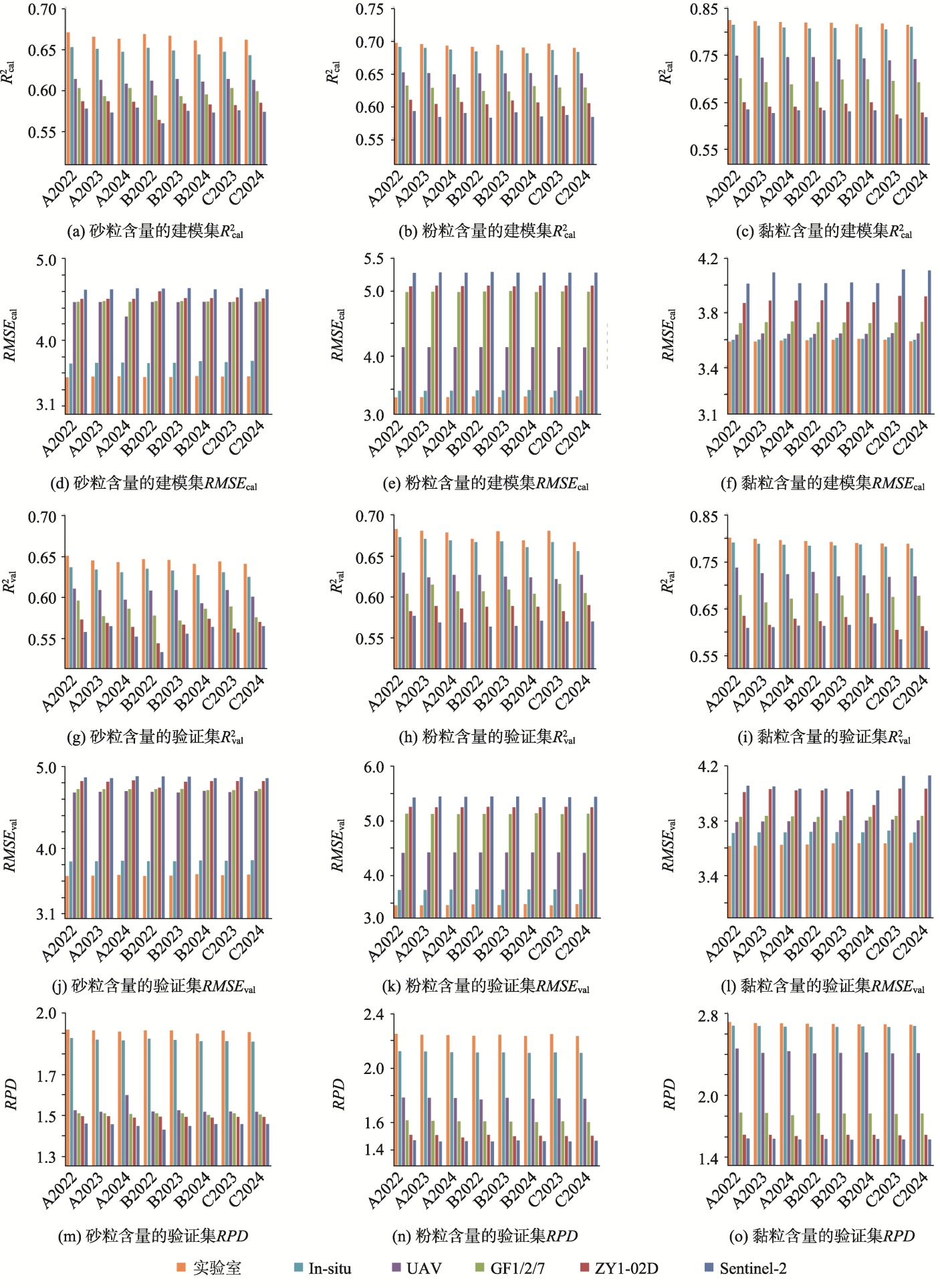
图8 土壤质地含量的模型建模集和验证集结果
3.6 土壤质地含量的制图结果分析
根据各田块土壤质地含量与特征光谱之间的回归方程式,在ENVI 5.3和ArcGIS 10.2软件中实现了土壤质地含量的空间分布制图及可视化。土壤质地含量等级是根据中国第二次土壤普查规范中土壤养分含量的分级标准进行划分的。
卓扎滩农田的砂粒含量主要为75%<砂粒≤83%(浅红色),拦隆口农田主要为67%<砂粒≤75%(黄色),白土庄农田则主要为75%<砂粒≤83%(浅红色),整体分布较为均匀。从2022—2024年,3块农田的土壤质地含量变化较小。例如,在无人机影像制图中,砂粒含量在2022—2024年保持为75%<砂粒≤83%,3年的空间分布规律相似。这表明土壤质地作为一种相对稳定的土壤属性,通常随时间缓慢变化。
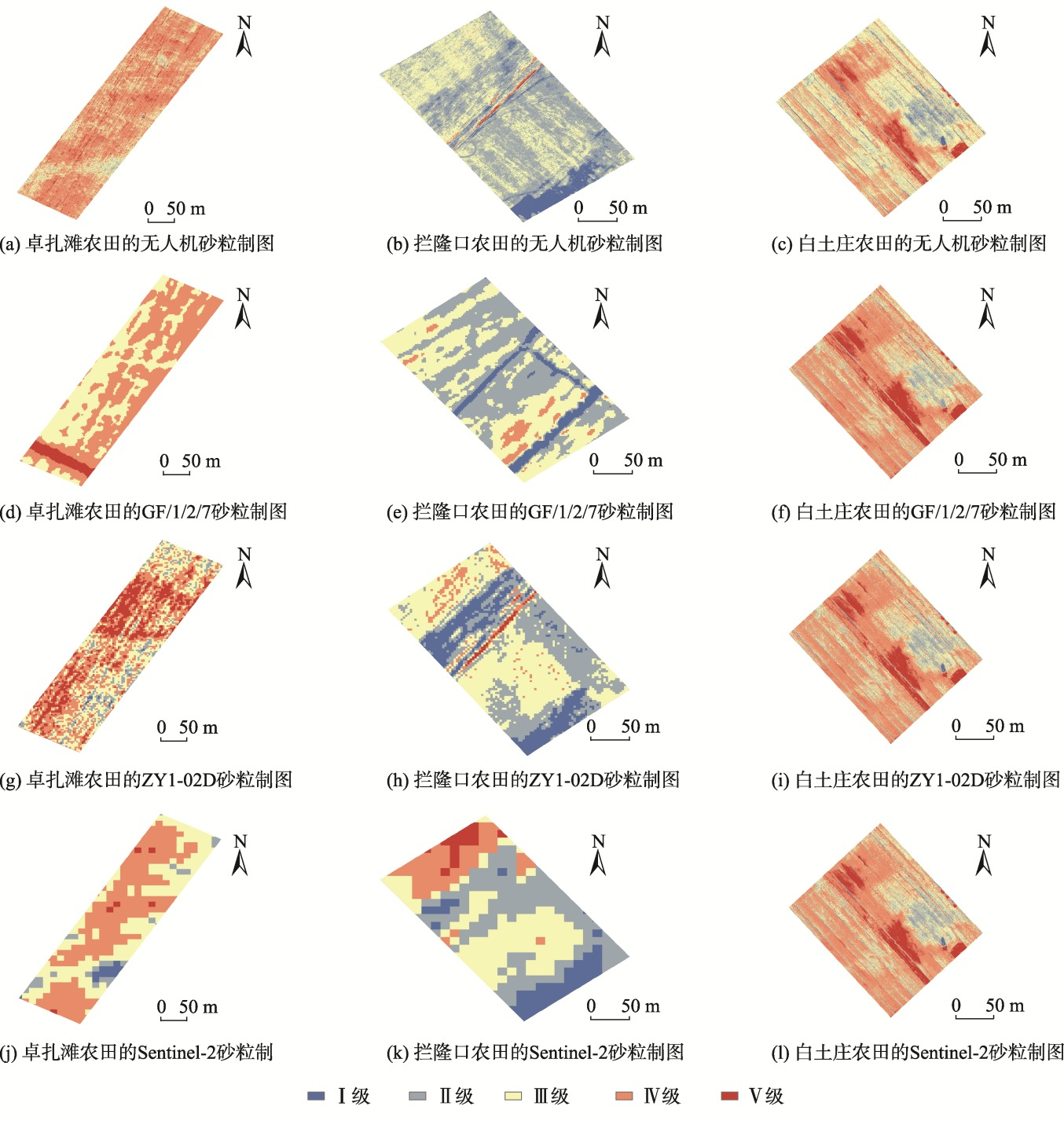
图9 砂粒含量的空间分布
除了土壤质地含量变化较小外,还可以明显看出,无人机影像的制图精度最高,其次是GF和ZY1-02D影像,而Sentinel-2影像的制图精度相对较低。这一差异可能与影像的空间分辨率有关。无人机影像的空间分辨率为4.98 cm,而GF1/2/7和ZY1-02D影像的分辨率分别为2.0、0.8、0.65和2.5 m,Sentinel-2影像的分辨率为10 m。较低的空间分辨率导致较大的像元,从而在Sentinel-2影像制图中出现明显的"斑块"效应,致使其制图结果较为粗糙。
4 讨论
本研究探讨了青海湟水流域土壤质地的遥感估算,重点分析了高光谱与多光谱数据的应用。通过比较无人机高光谱数据与卫星影像(ZY1-02D、GF1/2/7、Sentinel-2),发现不同波段对土壤质地估算的敏感性差异与土壤的物理化学特性密切相关。近红外波段(700~1 300 nm)对土壤湿度和有机质的敏感性较强,尤其能区分黏土与砂土的反射特性。短波红外波段(1 300~2 500 nm)则更敏感于土壤矿物成分,尤其是含石英或钙质的土壤类型(如黑钙土和栗钙土)。
此外,青海地区土壤的光谱反射特征与其他地区存在显著差异。例如,青海的高原气候条件和特殊的地质背景导致其土壤中富含钙质和碱性物质,在近红外和短波红外波段的反射强度较高。这与华北平原地区的土壤反射特征有所不同,后者土壤的光谱反射通常更多受有机质和水分的影响。由于青海地区的特殊土壤类型,黑钙土和栗钙土在反射特性上表现出与其他地区不同的波段敏感性,这表明针对不同土壤类型和地理区域的特征波段选择至关重要。
无人机和卫星遥感影像获取的土壤光谱数据由于受到大气、水分、太阳辐射等环境因素的影响,因此均低于地面地物光谱仪估算结果。此外UAV、GF1/2/7、ZY1-02D和Sentinel-2影像的光谱分辨率和空间分辨率都不相同,这也会造成UAV估算最好,GF1/2/7、ZY1-02D数据其次,Sentinel-2数据精度最差。这主要是因为无人机的空间分辨率为4.98 cm,远高于Sentinel-2的10 m,其能获取的土壤信息更准确。
此外,从GF1/2/7多光谱影像和ZY1-02D高光谱影像的估算结果来看,融合后GF1/2/7影像的空间分辨率为2 m/0.8 m/0.65 m,ZY1-02D影像的空间分辨率为2.5 m。GF1/2/7影像的估算精度优于ZY1-02D影像,这也说明光谱分辨率不是决定估算精度的唯一因素,而是由光谱分辨率和空间分辨率共同决定的。
5 结论
研究结论
- 在XGBoost方法的模型结果中,无人机影像光谱的最优模型精度RPD为2.441,GF1/2/7、ZY1-02D和Sentinel-2卫星影像的最优模型精度RPD分别为1.815、1.601和1.561。
- 基于无人机和卫星影像光谱的土壤质地含量估算精度整体要低于地物光谱仪测得的光谱估算精度,具体的估算精度RPD从高到低排序为:实验室光谱(2.698)>野外原位光谱(2.662)>无人机影像光谱(2.441)>GF1/2/7卫星影像光谱(1.815)>ZY1-02D卫星影像光谱(1.601)>Sentinel-2卫星影像光谱(1.561);在土壤质地含量的估算结果中,黏粒含量的精度最高,RPD最高可达2.70,粉粒次之,RPD为2.24,砂粒含量的精度最低,RPD为1.91。
- 砂粒和黏粒含量与对应土壤光谱反射率值呈负相关关系,即随着含量等级的升高而反射率值降低,粉粒含量则展现出正相关关系;此外,砂粒、粉粒和黏粒的敏感波段主要集中在近红外波段范围(780~2 400 nm)。
- 从制图结果来看,2022—2024年各田块的土壤质地含量变化较小,表现出相对稳定的状态,3个田块的质地含量主要表现为:67%<砂粒≤83%、10.6%<粉粒≤19.1%和3.2%<黏粒≤6.6%。