引言
建筑物三维模型重建是摄影测量与遥感、计算机视觉、测绘地理信息等领域研究的热点问题。机载激光探测与测量技术(Light Detection and Ranging, LiDAR)是可快速实时获取目标对象三维信息的重要技术手段。
随着三维数据采集技术的不断进步,机载LiDAR测量技术具有穿透性强,受天气影响小、数据精度高、作业更加高效等优点,在3D城市建模、城市规划、制图分析等多领域,占有越来越重要的地位。
数据驱动方法
不需事先识别建筑物类型,可直接根据点云建模,是一种自下而上的策略。通过结合随机样本一致性(RANSAC)、聚类、区域增长、以及基于成本函数算法实现三维模型重建。
模型驱动方法
需要预先确定建筑物类型,是一种自上而下的策略。基于模型驱动的建筑物重建的关键在于建立一个包含不同屋顶类型风格的建筑物基元库。
研究方法
总体算法流程
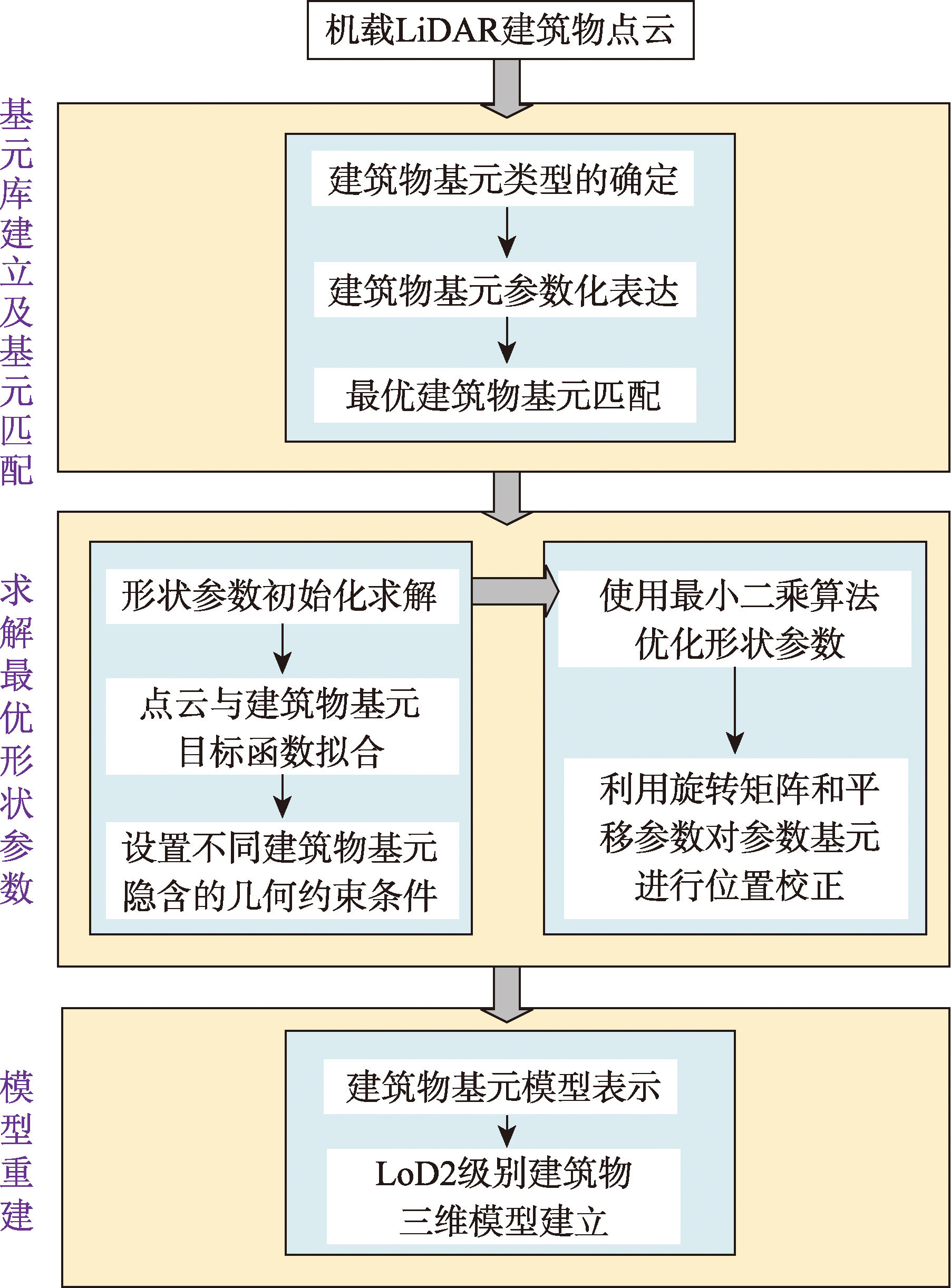
图1 建筑物三维模型重建流程
建筑物基元库
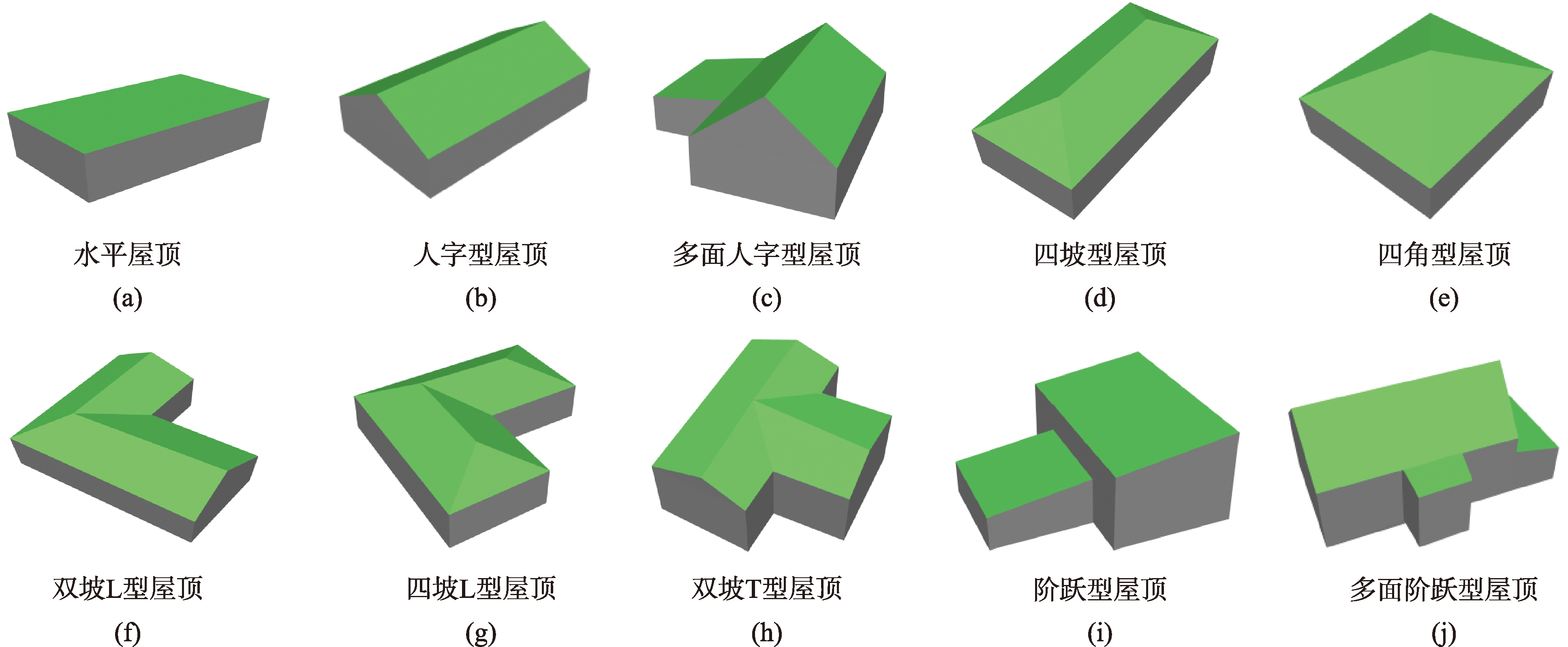
图2 建筑物基元库
本文设计了包含经典屋顶结构的基元库,根据建筑物风格将所对应的建筑物基元屋顶分为3类,分别为简单的建筑物屋顶、复杂的建筑物屋顶和阶跃型屋顶。其中简单的建筑物屋顶包括水平屋顶、人字型屋顶、四坡型屋顶以及四角型屋顶;复杂的建筑物屋顶包括多面人字型屋顶、双坡L型屋顶、四坡L型屋顶、双坡T型屋顶;阶跃型屋顶包括具有高度显著变化的屋顶。
屋顶点云与基元匹配
图3 屋顶点云与基元匹配的流程
基元库建立完成后,首要任务是实现屋顶点云与其对应的建筑物基元识别匹配。首先,依据文献[24]中屋脊线的不同属性标记基元屋顶面片,分析面片间的邻接关系。以任一屋顶面片为起始面,依次编号,构造该顺序下的唯一邻接矩阵;其次,提取屋顶点云的特征线建立该屋顶点云任意面片顺序下的所有邻接矩阵;最后,根据面片数量初步筛选建筑物基元,选取与屋顶点云面片数量相同的建筑物基元作为候选基元,将屋顶点云的邻接矩阵与各候选基元的唯一邻接矩阵对比,匹配到2个相同矩阵则匹配完成。
形状参数优化
采用最小二乘算法当中的序列二次规划(Sequential Quadratic Programming, SQP)算法求解形状参数的过程,是一个非线性最小二乘求解问题,它可以优化具有约束条件的复杂问题。SPQ算法被广泛认为是求解约束非线性优化问题最有效的方法之一。
目标函数:
建筑物三维模型重建的过程,本质是在目标函数下求建筑物基元形状参数的最优解,即当所有点到建筑物基元屋顶拟合平面距离平方的平均值达到最小时,目标函数取得最优解。
D = ||axᵢ + byᵢ + czᵢ + d|| / √(a² + b² + c²)
约束条件示例(双坡T型屋顶):
- S - (L_y × W_x + W_y × (L_x - W_x)) ≥ 0
- L_x - W_y ≥ 0
- L_x - W_x ≥ 0
- L_y - W_x ≥ 0
- L_y - W_y ≥ 0
- h - h_e - h_w ≥ 0
- h_w - h_e ≥ 0
- h - h_w ≥ 0
位置校正
建筑物基元与实际建筑物的各形状参数相同但是它们在各自坐标系下的位置不同,需通过平移、旋转与使它们对齐。平移参数为α=(t_x, t_y, t_z),3个参数分别代表建筑物基元在坐标系下沿X轴、Y轴、Z轴方向的平移量。
平移参数由建筑物基元原点与点云原点的坐标差确定。平移到一致的位置后基元模型可能与其对应的建筑物点云存在位置上的相对偏差,利用旋转矩阵调整方向偏差。
旋转矩阵:
R_k = [cos(k) -sin(k) 0; sin(k) cos(k) 0; 0 0 1]
实验与分析
实验数据
本文选择Building3D数据集提供的屋顶点云进行实验。该数据集为一个城市规模的数据集,多用于基于航空LiDAR点云建筑物模型重建实验。从中选择10栋具有代表性的建筑物进行模型重建实验,其中包括四坡L型屋顶、双坡T型屋顶、阶跃型屋顶等复杂屋顶结构。
模型重建结果
经过SQP算法的多次迭代处理,得到了各建筑物基元的最佳参数。这些参数用于参数化表示建筑物基元模型实现了建筑物三维模型重建。为了更准确地描述建筑物模型,本文采用了城市地理标记语言(City Geography Markup Language, CityGML)中对城市实景三维的精细等级划分,构建LoD2级别的建筑物三维模型。
精度分析
通过对比实验结果可以看出本文方法在处理上述问题中有着显著的优势。为更好地凸显本文方法的准确性,选用4组数据对比设置约束条件前后基元模型特征线与参考数据的拟合程度,通过对比可以发现本文方法不仅提高了基元模型拟合精度,还有效保留并规范其几何结构。
精度统计
| 屋顶类型 | 目标函数平均值/m (文献[24]方法) | 目标函数平均值/m (本文方法) |
|---|---|---|
| 水平屋顶 | 0.002 | 0.002 |
| 人字型屋顶 | 0.570 | 0.540 |
| 多面人字型屋顶 | 0.440 | 0.410 |
虽然在整体上已经取得了较好的拟合效果,但建筑物基元的各顶点与实际建筑物点云顶点在空间位置上仍存在一定的细小偏差。通过两点间距离式和高差绝对值式分别来计算各方向偏差量,计算结果建筑物基元与建筑物点云在水平方向平均偏差为0.10 m,竖直方向的平均偏差为0.04 m,进一步说明本文方法可以准确获得各类建筑物对应的形状参数。
结论
为解决建筑物屋顶点云在局部结构细节上可能存在的点云密度分布不均,受噪声影响异常点与拟合平面相距较远,导致模型重建拟合精度较低的问题,本文提出一种联合序列二次规划及高程步长校正的机载LiDAR建筑物点云三维模型重建方法。通过选用Building3D数据集中多组经典屋顶结构建筑物点云验证表明:
- 本文通过增加对阶跃型基元阶跃线属性标注,扩大了建筑物基元屋顶拓扑图构建邻接矩阵的范围,进而解决了建筑物点云与阶跃型基元识别匹配的问题;
- 使用最小二乘算法中的SPQ算法可以对多种形状建筑物基元进行参数求解,无需手动调节,提高了求解最佳参数的自动化程度,可灵活调节形状参数的规范建筑物模型屋顶的几何结构;
- 建筑物基元与屋顶点云拟合后,以平均点间距为步长调节基元屋顶面与点云在高程上的相对位置,减小由点云密度不均匀和噪声影响导致的结构细节上存在的拟合误差。通过实验对比,屋顶点云中点到建筑物基元屋顶面的目标函数平均值由0.35 m提升到0.32 m,建筑物基元与建筑物点云的水平平均偏差为0.10 m,竖直平均偏差为0.04 m,提高了建筑物三维模型重建的精度。
研究局限与展望
本文方法可以实现几何结构规范的建筑物三维模型重建,在提高三维模型重建精度方面也有了很大的提升,但仍存在以下局限性。一方面,基元库中所包含的经典屋顶结构建筑物基元难以覆盖所有屋顶结构,如圆形屋顶,具有弧度的常见复杂屋顶等;另一方面,对原始点云数据的质量有较高要求,对于存在大范围缺失的建筑物点云数据,求解初始形状参数可能会不理想。未来将进一步扩充基元库中的建筑物基元类型,通过分解并组合基元的方式实现对复杂建筑物屋顶进行三维模型重建,同时根据基元屋顶的复杂程度设置可以描述其特征的形状参数,灵活结合基元的轮廓线与屋脊线的关系设置约束条件,在全局范围内求得最佳的参数值。
* 以上内容由AI自动生成,内容仅供参考。对于因使用本网站以上内容产生的相关后果,本网站不承担任何商业和法律责任。