技术框架
多策略融合的航空影像特征匹配方法体系
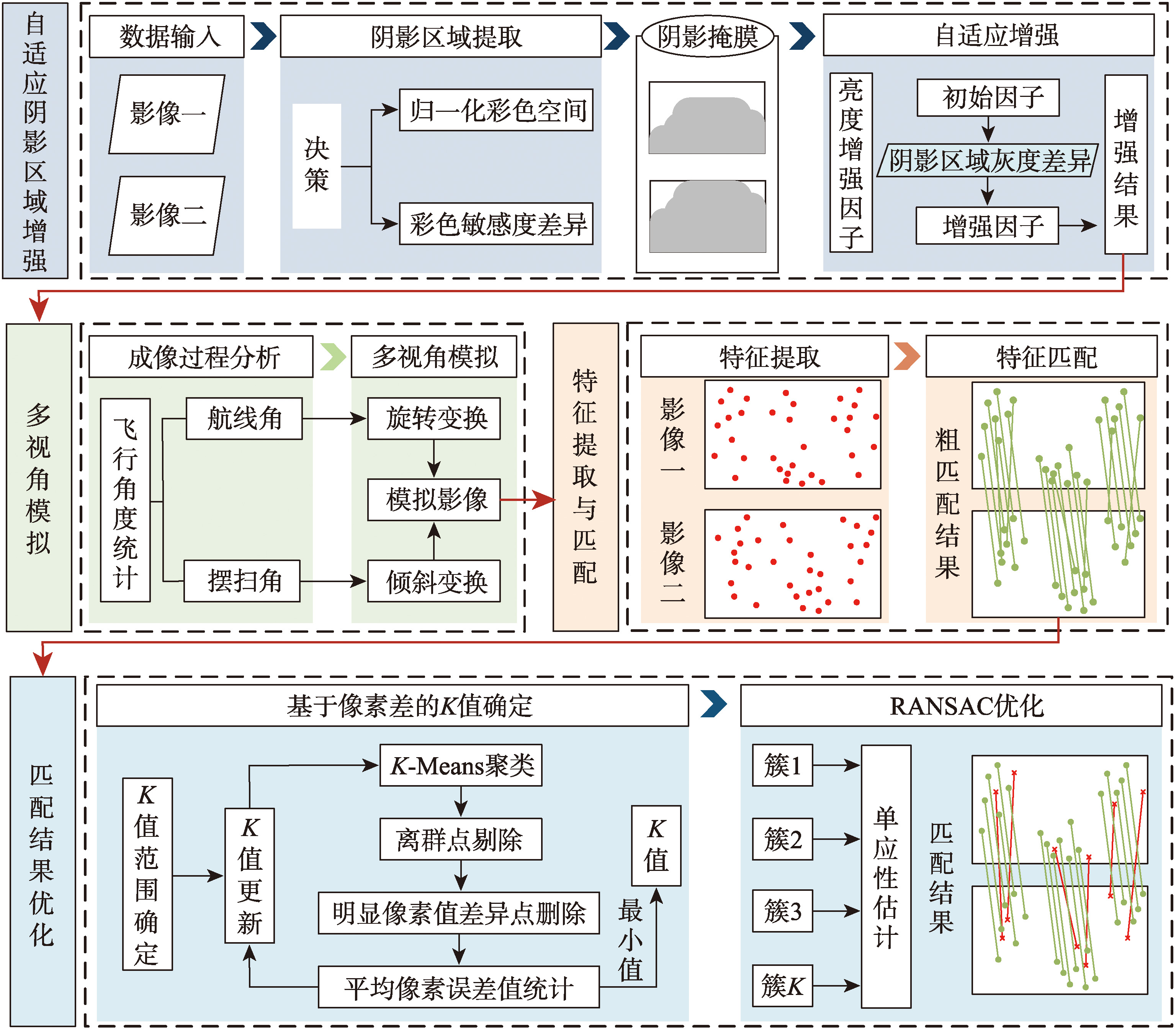
自适应阴影增强
提取阴影区域,动态调整亮度增强因子,恢复地物细节信息
多视角模拟
基于相机姿态构建多视角模拟影像,提升视角变化适应性
特征提取匹配
结合SIFT特征提取与Affine-LightGlue网络进行高质量匹配
聚类优化
基于K-Means聚类的RANSAC优化,提高匹配精度
航空影像特征匹配面临阴影遮蔽、视角变化等复杂成像条件挑战
航摄平台姿态变化引起的航线间倾角差异,导致传统特征匹配算法难以获得鲁棒性强的结果
成像过程中光照强度、方向变化引发影像局部对比度失衡、阴影区域纹理信息丢失
复杂成像条件下匹配点数量少且分布不均匀,显著影响三维重建等下游任务精度
多策略融合的航空影像特征匹配方法体系
提取阴影区域,动态调整亮度增强因子,恢复地物细节信息
基于相机姿态构建多视角模拟影像,提升视角变化适应性
结合SIFT特征提取与Affine-LightGlue网络进行高质量匹配
基于K-Means聚类的RANSAC优化,提高匹配精度
基于影像原始信息的智能阴影检测与增强处理
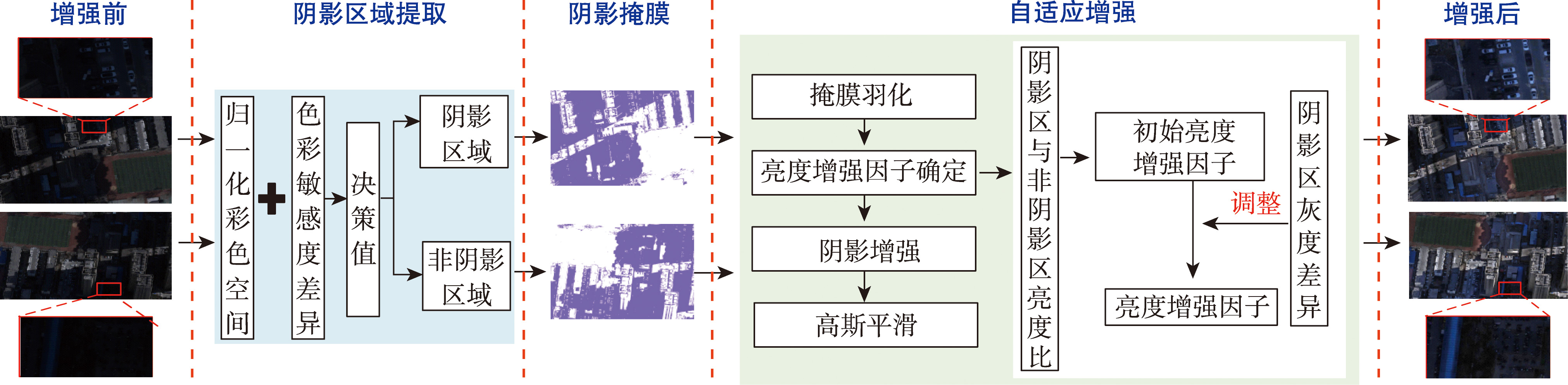
r = R/(R+G+B), g = G/(R+G+B), b = B/(R+G+B)
分析归一化彩色空间与原彩色空间差异实现准确表征
基于阴影区和非阴影区平均亮度比确定
根据阴影区域间灰度差异进行因子改正
有效恢复阴影区域地物细节,提升特征点数量
基于成像过程分析的视角变换模拟技术
根据影像间相对变化进行旋转变换模拟
基于相机姿态构建符合实际成像规律的模拟影像
提升输入特征的视角变化适应性,提高匹配质量
分析航线间倾角差异对匹配结果的影响
基于实际成像几何关系确定最优变换参数
显著提高大视角变化条件下的匹配鲁棒性
融合传统SIFT算法与深度学习网络的特征匹配
"该方法结合了传统SIFT特征提取算法和前沿的LightGlue特征匹配学习网络,通过引入多种优化策略,实现了复杂成像条件下的高质量匹配效果。"
动态聚类与局部优化相结合的匹配结果优化策略
根据粗匹配点数量确定聚类数K的范围
利用变换矩阵删除明显像素值差异的点
以平均像素值误差最小时对应的K值作为最终聚类数
对匹配点进行K-Means聚类处理,剔除离群点
对每一簇分别利用RANSAC算法进行局部优化
降低全局平面假设误差,提高内点选择精度
基于A3相机航空影像数据的方法验证与性能评估
经过自适应阴影增强和多视角模拟策略处理后,匹配点数量相比未处理增加近3倍
聚类RANSAC优化策略相比传统RANSAC方法平均像素距离误差降低约30%
整体方法的匹配正确率平均提升24.8%,显著改善匹配质量
有效恢复阴影区域细节,显著增加特征点数量
提升视角变化适应性,改善匹配鲁棒性
降低平面假设误差,提高匹配精度
基准方法性能表现
应用单一优化策略后的性能
本文方法的综合性能表现
多策略融合的航空影像特征匹配技术突破
"本文方法有效地解决了复杂成像条件下航空影像匹配困难的问题,为三维重建等下游任务提供了更加充分且可靠的数据支持。"
为航空遥感与三维重建领域提供重要技术支撑
提高航空影像处理质量,为大范围地形测绘和地物识别提供更精确的数据基础
为SfM、密集场景三维重建等任务提供高质量匹配点,显著提升重建精度和完整性
推动图像拼接、运动恢复结构等计算机视觉任务的技术进步和应用拓展