研究背景与意义
现有问题
基于遥感影像提取的建筑物图斑通常存在不完整、冗余点等问题,难以直接用于制图。现有规则化方法只考虑建筑物图斑局部形状和弱直角特征,忽略建筑物在影像的真实分布与形状,造成轮廓与实际形状不符。
应用价值
方法框架
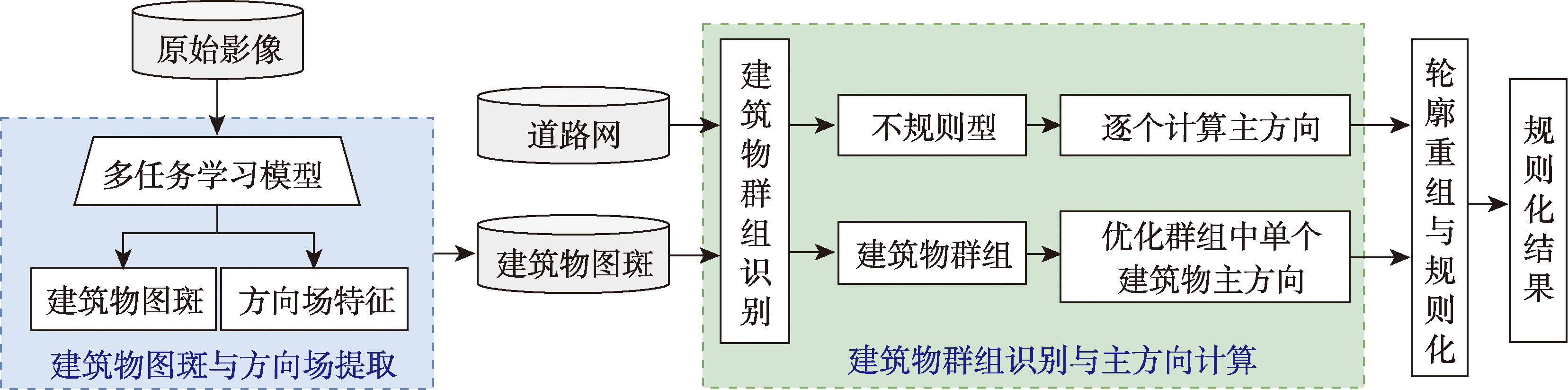
图1 建筑物轮廓提取与规则化流程
多任务学习建筑物提取
构建多任务学习模型,同时实现建筑物图斑的提取与图斑方向的定量描述,基于影像直接学习建筑物方向场特征。
建筑群组识别与主方向计算
结合建筑物图斑形状和邻近关系划分建筑物群组和独立建筑物,分别计算轮廓主方向。
轮廓重组与规则化
基于优化的轮廓主方向拆解和重构建筑物轮廓边,实现对建筑物轮廓的规则化。
核心技术创新
方向场特征
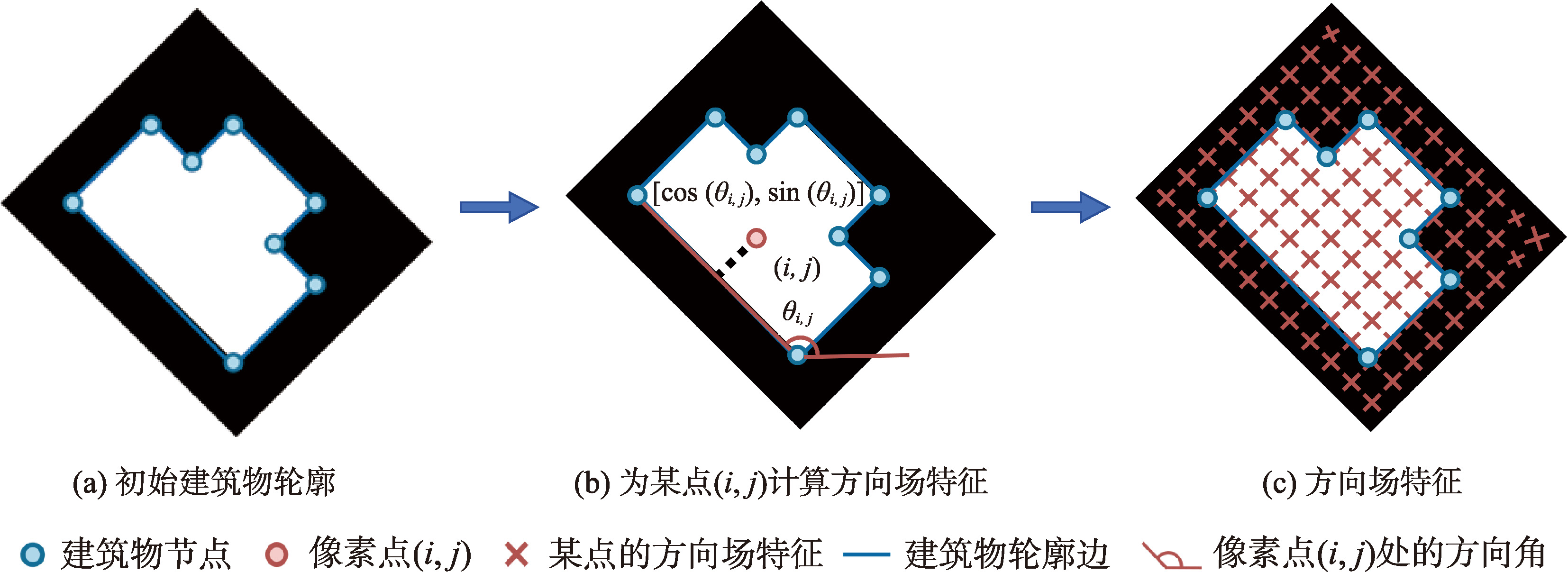
图2 方向场计算过程示意图
方向场是一个平滑且连续的向量空间,反映了建筑物多边形在空间中的分布方向。对于场中的任意一个位置,该位置的方向与离其最近的建筑物多切线方向对齐。
多任务学习模型
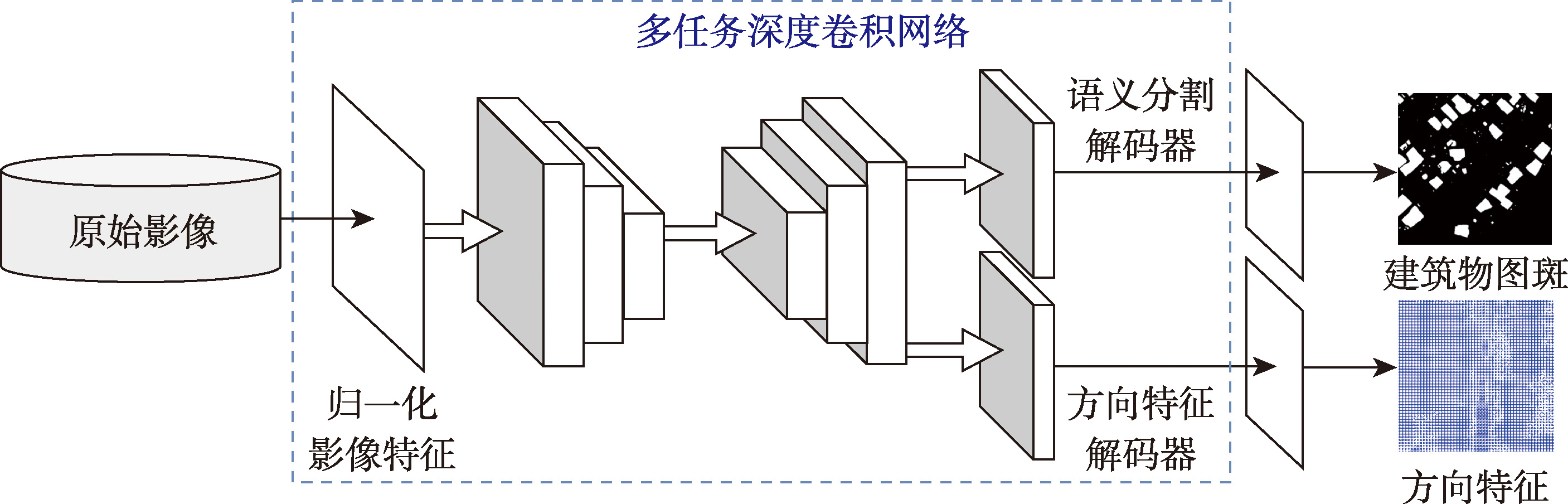
图3 基于多任务学习的建筑提取与方向场特征学习模型
模型包括2个解码分支:一个分支输出影像块的建筑物预测结果,另一个分支预测该幅影像所对应的方向场。主干网络为Unet模型,编码器为ResNet101的1-5层。
实验数据与设置
Inria数据集
WHU数据集
实验结果
本文方法与4种规则化算法在2个数据集上的量化结果
| 数据集 | 方法 | C↓ | D↓ | p↓ | IoU↑ | A↑ |
|---|---|---|---|---|---|---|
| Inria数据集 | 超像素法 | 0.24 | 0.91 | 1.60 | 72.73 | 97.31 |
| 矩形重组法 | 0.31 | 0.85 | 2.36 | 71.95 | 97.35 | |
| MBR法 | 0.22 | 1.00 | 1.77 | 69.10 | 96.23 | |
| 向量重组法 | 0.26 | 0.89 | 1.61 | 71.70 | 97.01 | |
| 本文方法 | 0.16 | 0.78 | 1.55 | 76.98 | 97.91 | |
| WHU数据集 | 超像素法 | 0.25 | 0.39 | 2.32 | 81.81 | 96.84 |
| 矩形重组法 | 0.17 | 0.34 | 2.60 | 74.89 | 95.35 | |
| MBR法 | 0.23 | 0.68 | 2.27 | 81.34 | 96.85 | |
| 向量重组法 | 0.14 | 0.38 | 2.21 | 83.77 | 97.27 | |
| 本文方法 | 0.12 | 0.29 | 2.16 | 88.91 | 98.21 |
注:↓表示该指标数值越小结果越好;↑表示该指标数值越大结果越好
性能优势
- • 相较于向量重组法,在Inria数据集的IoU指标上有 5.28% 提升
- • 准确度在两个数据集分别达到 97.91% 和 98.17%
- • 在所有评价指标上均表现最优
- • 有效处理"Y"形、"C"形建筑物和建筑物群
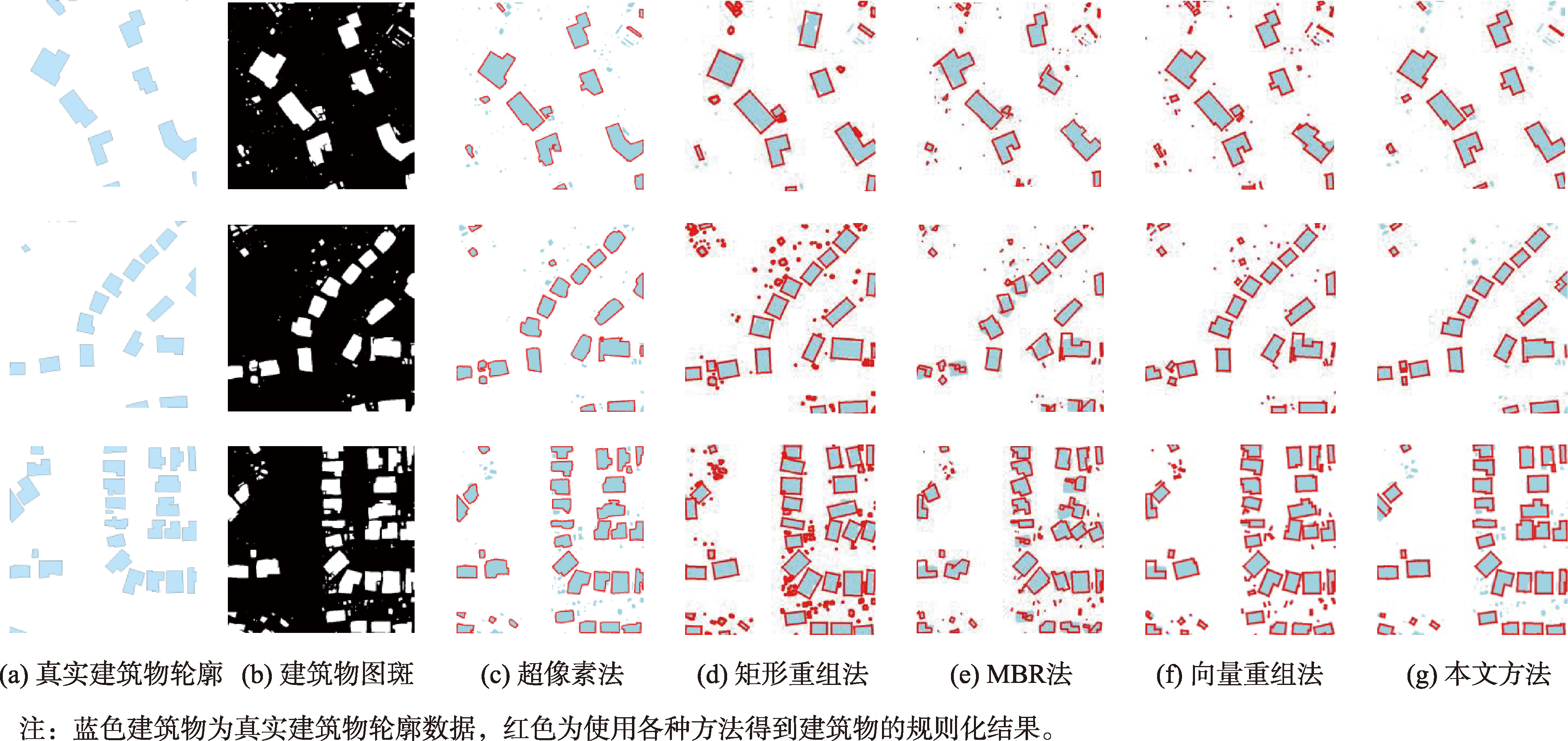
可视化分析
- • 能够获得更清晰准确的建筑物角点
- • 有效避免邻近建筑物互相压盖的问题
- • 相比实例分割算法有更高精度和运算效率
- • 规则化结果与真实建筑物轮廓误差更小
可视化结果
Inria数据集可视化结果
WHU数据集对比试验结果
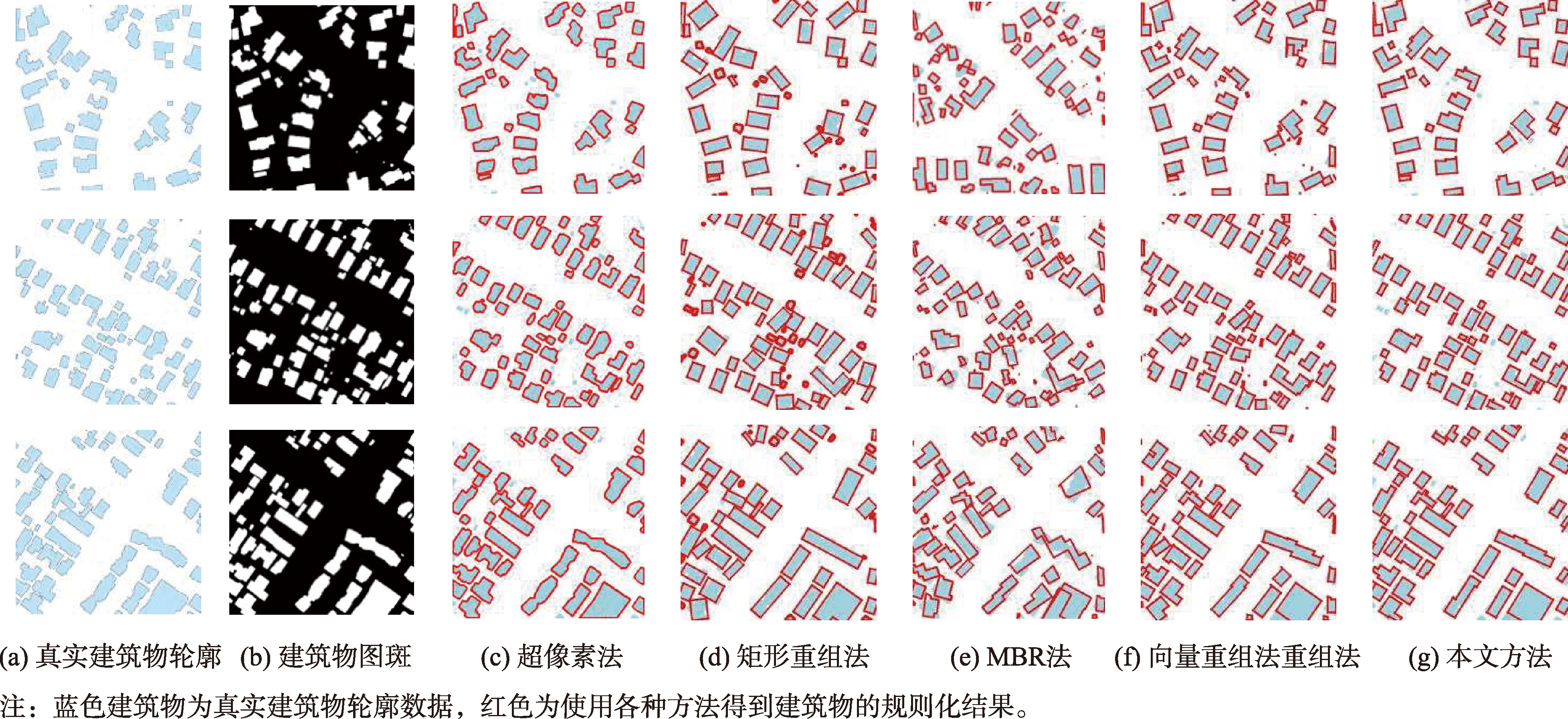
建筑物规则化试验结果
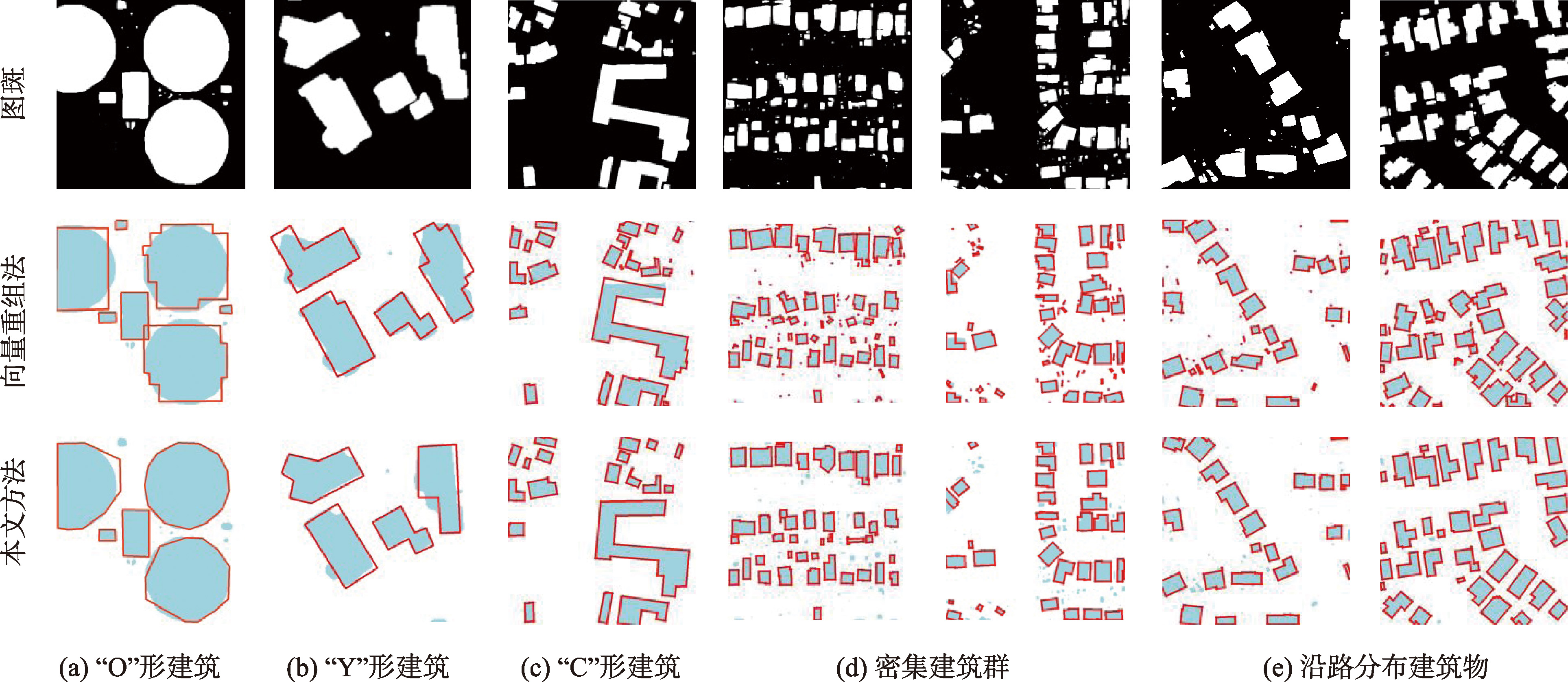
图4 建筑物规则化试验结果
技术特点与优势
多任务学习
同时实现建筑物图斑提取与方向场特征学习,提升建筑物轮廓规则化精度
方向场特征
引入方向场特征计算建筑物主方向,减少基于图斑轮廓计算主方向的误差
群组识别
通过邻近图识别建筑物群组,避免邻近建筑物互相压盖和相交问题
分辨率变化对规则化结果影响分析
不同空间分辨率WHU数据集的对比试验量化结果
| 方法 | 0.3m分辨率 | 1.2m分辨率 | ||
|---|---|---|---|---|
| IoU | PoLiS | IoU | PoLiS | |
| 超像素法 | 83.50 | 1.81 | 71.12 | 2.89 |
| 矩形重组法 | 82.82 | 2.12 | 70.14 | 2.95 |
| MBR法 | 78.89 | 2.56 | 65.21 | 3.89 |
| 向量重组法 | 80.57 | 2.34 | 66.47 | 3.09 |
| 本文方法 | 87.08 | 1.17 | 72.87 | 2.51 |
分析结论
影像分辨率的降低直接导致建筑提取图斑质量的降低,漏检、边缘不完整的现象严重,进而导致规则化结果质量的降低。本文方法仍然在两个指标中表现最佳,表明虽然分辨率降低对规则化效果有一定程度的影响,但本文方法能在一定程度上抵抗图斑不完整对结果的影响。
建筑物形态对规则化结果影响分析
"O"形建筑物
本文方法不改变其形态,避免产生垂直锯齿和建筑物压盖问题
"Y"形建筑物
保持建筑物原有形状,避免被错误规则化为"L"形建筑物
"C"形建筑物
上下两部分保持各自的真实方向,不被强制规则化为平行
技术优势
由于考虑了多个建筑主方向,本文方法能够在保持建筑良好的直角特征的基础上,较好地应对具有多个主方向的建筑物。对于有一定分布规律的建筑物群,本文方法化简结果更为整齐,构建的RNG图在一定程度上能避免邻近建筑规则化后的相交问题。
结论与展望
主要贡献
- 提出引入空间方向场特征的建筑物轮廓规则化方法
- 构建多任务学习模型,基于影像直接学习建筑物方向场特征
- 分别为建筑物群组和独立建筑物计算主方向
- 在多个评价指标上显著优于现有方法
存在问题
- 结果质量依赖于方向场特征的准确性
- 圆形、五角形等特殊复杂建筑物规则化结果仍不够理想
- 建筑物轮廓受道路要素影响较大
未来研究方向
针对非直角建筑物的规则化问题进一步研究,考虑构建规则化方法库,为规则建筑物和不规则建筑物匹配不同的规则化方法。另外,对要素的冲突检测与一致性处理方法进一步研究,解决规则化后建筑可能与其他要素产生的空间冲突问题。