研究背景与挑战
应用领域重要性
军事侦察
无人机军事侦察中的远距离目标识别
安防监控
监控视频中远处行人和异常行为检测
智能交通
自动驾驶系统中交通标志识别
无人机航拍
航拍图像中微小物体的精确定位
技术挑战
核心技术创新
HCTB模块
混合特征提取
核心思想
结合CNN局部特征提取与Transformer全局信息捕捉能力
技术特点
- • 通道分组:1/4通道用于Transformer分支
- • CGSA模块:结合MHSA和CGLU
- • 残差连接:缓解梯度消失问题
- • DropPath正则化:提升模型鲁棒性
MDSKC模块
多膨胀率共享卷积
核心思想
共享卷积核进行不同尺度处理,减少参数冗余
膨胀率设置
OKCSM模块
全核跨阶段融合
核心思想
基于Omni-Kernel和CSP思想的特征融合
三分支结构
- • 局部分支:细节特征提取
- • 大分支:中尺度特征捕捉
- • 全局分支:上下文信息整合
- • 优化:卷积核从63调整至31
算法整体架构
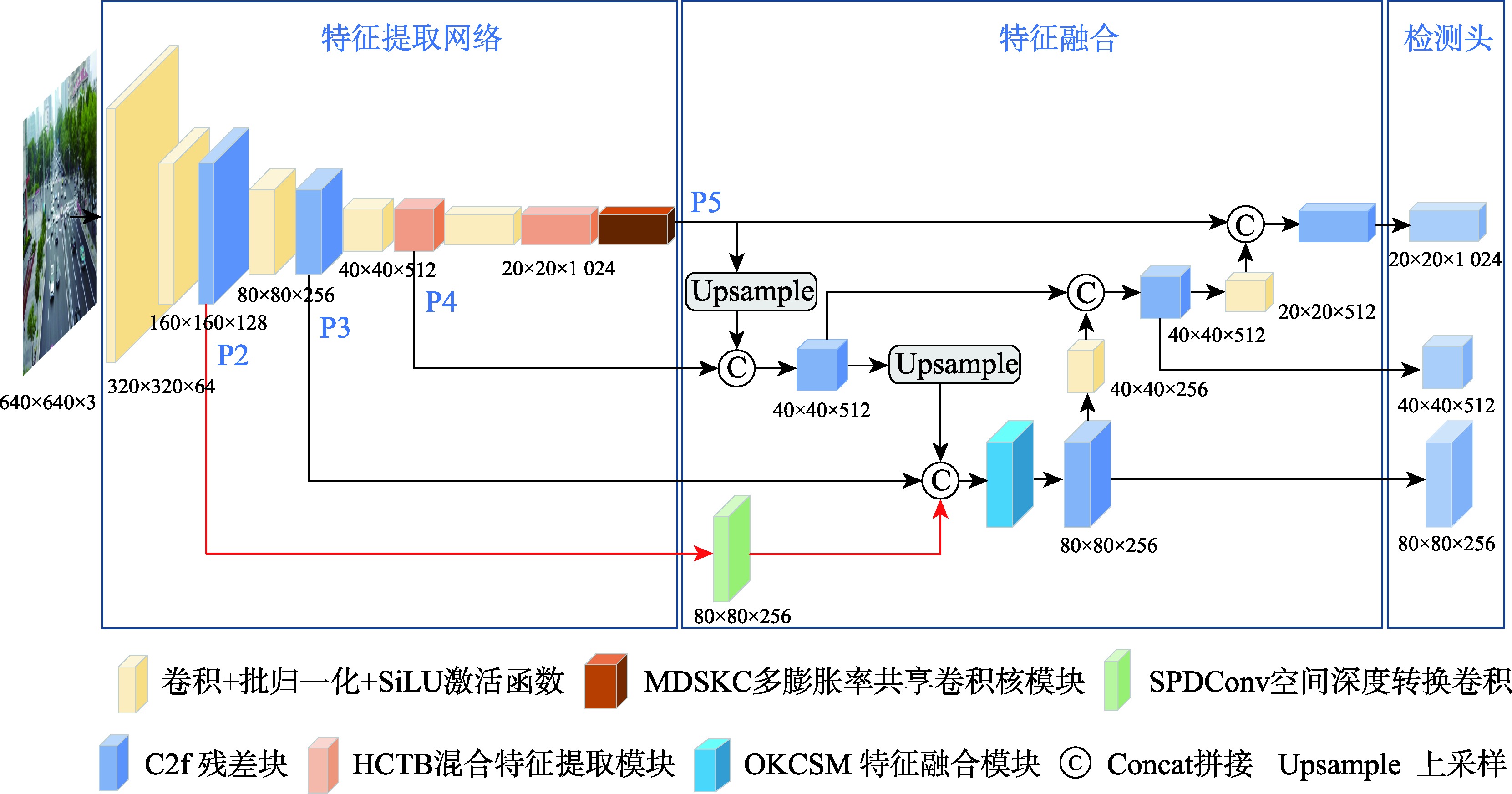
图1: 本文算法整体框架
① 主干网络特征提取
采用HCTB模块替换原有特征提取单元,通过CNN和Transformer混合架构增强特征表达能力
② 多尺度特征提取
在主干末端构建MDSKC模块,利用多膨胀率空洞卷积扩展感受野获取多尺度信息
③ 小目标特征增强
从P2层延伸小目标分支与P3融合,使用OKCSM模块优化特征金字塔网络
技术细节深度解析
混合特征提取详解
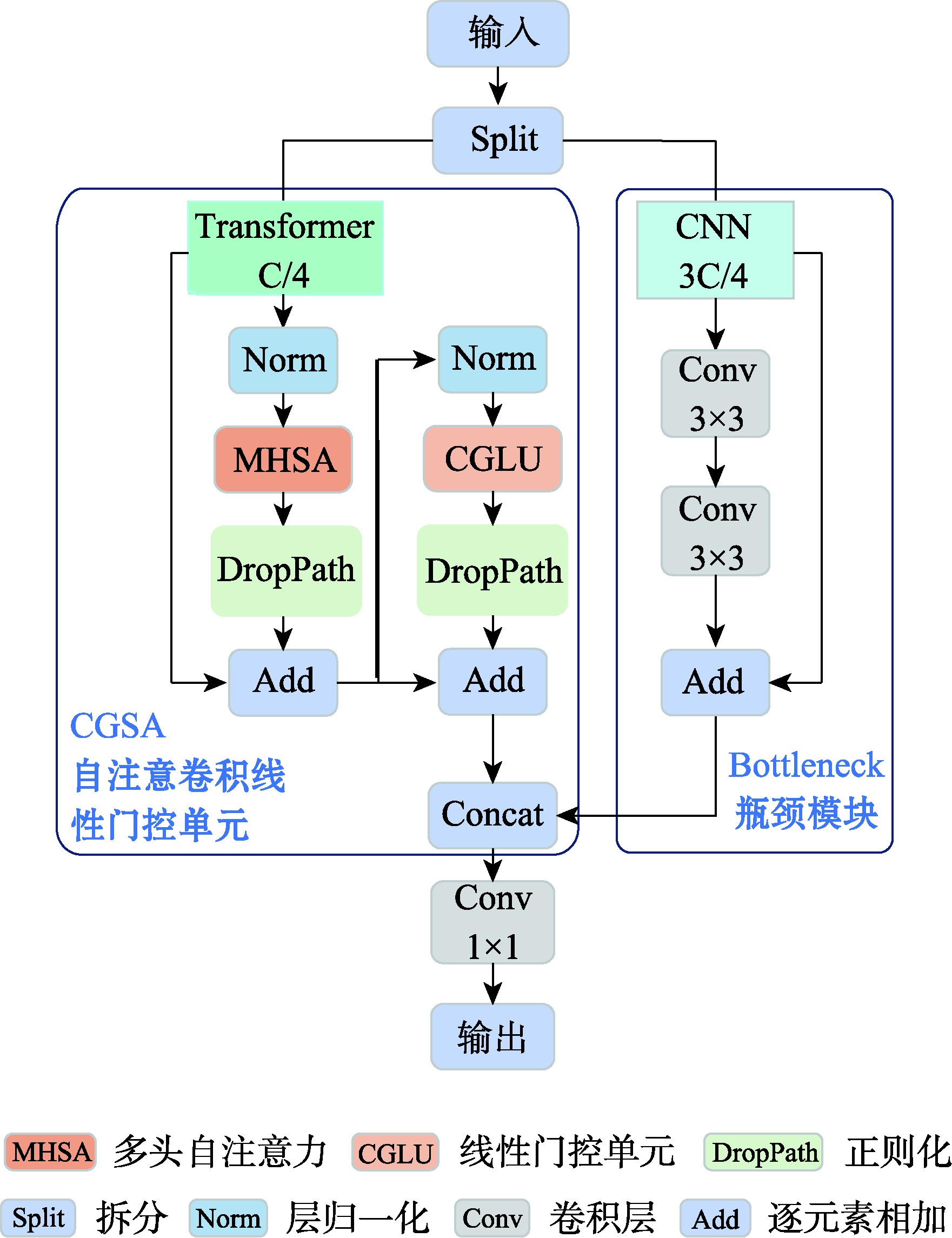
CGSA模块组成
- 多头自注意力机制(MHSA):并行计算多个注意力头,提升特征捕捉灵活性
- 卷积线性门控单元(CGLU):替代传统FFN,增强非线性特征表达
- 层归一化:两次规范化操作确保训练稳定性
- 残差连接:促进信息流动,防止梯度消失
通道分配策略
Transformer分支
CNN分支
多膨胀率共享卷积核模块详解
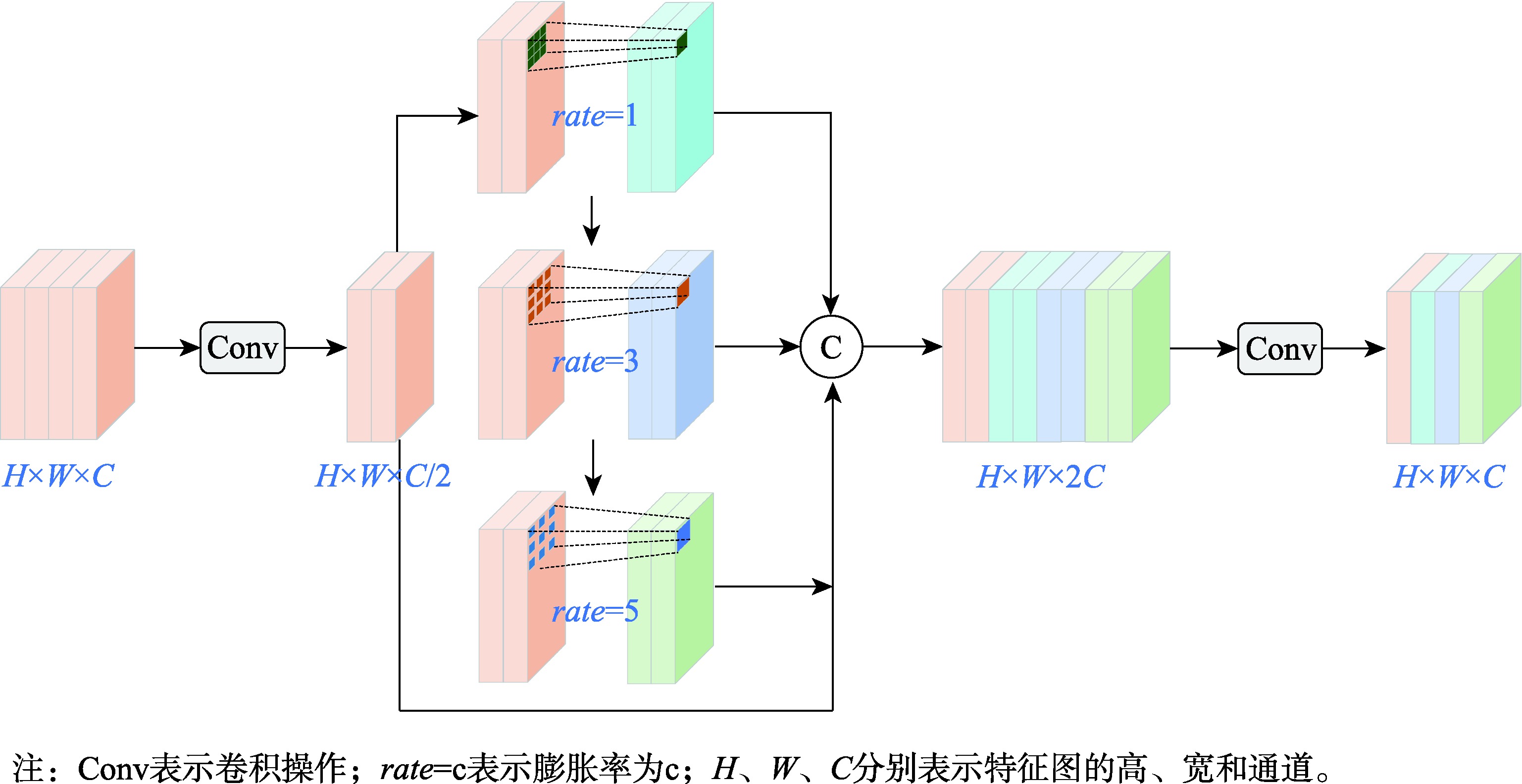
膨胀率设计原理
- 膨胀率=1:捕捉局部细节特征,保持原始分辨率
- 膨胀率=3:扩展感受野至中等范围,获取中尺度上下文
- 膨胀率=5:大范围感受野,捕捉全局上下文信息
- 参数共享:同一卷积核处理不同尺度,减少冗余参数
相比SPPF的优势
小目标特征增强策略
传统方法 vs 本文方法
传统方法问题
- • 直接添加P2检测层增加计算量
- • 后处理更加耗时
- • 参数量大幅增加
本文创新方案
- • P2分支延伸至P3融合
- • SPDConv处理保留小目标信息
- • OKCSM模块优化特征融合
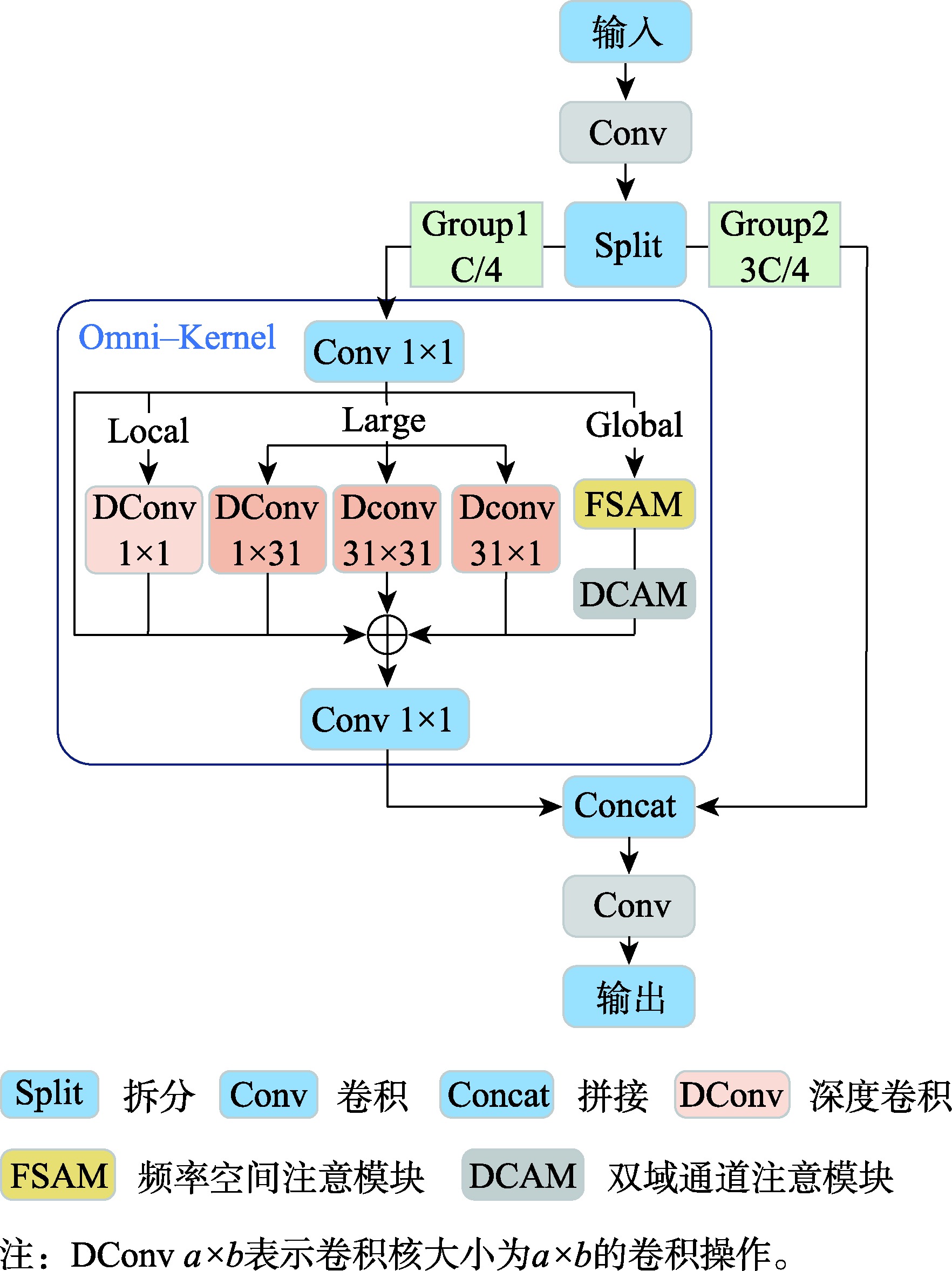
图4: 全核跨阶段特征融合模块
实验设计与数据集
数据集详细信息
VisDrone2019数据集
静态图像
目标实例
- • 14个中国城市无人机拍摄
- • 涵盖不同场景、高度、天气条件
- • 10种目标类别(行人、汽车等)
- • 小目标数量和尺度差异显著
TinyPerson数据集
图像数量
标注框
- • 专注小尺度目标检测
- • 绝对尺度36像素以下
- • 平均尺度18像素
- • 密集场景每张图片>200个目标
实验配置与参数
硬件环境
- 操作系统:Ubuntu 18.04
- GPU:NVIDIA GeForce RTX 4090
- Python:3.8.10
- PyTorch:2.0.0
- CUDA:11.8
训练参数设置
批量大小
VisDrone/TinyPerson
训练轮数
学习率
输入尺寸
评估指标
消融实验与性能分析
| 模块组合 | P/% | R/% | mAP₅₀/% | mAP₅₀:₉₅/% | 模型/MB |
|---|---|---|---|---|---|
| YOLOv8n | 56.2 | 43.0 | 45.7 | 28.2 | 6.3 |
| +HCTB | 55.8 | 44.2 | 46.2 | 28.5 | 5.5 |
| +HCTB+OKCSM | 58.2 | 45.2 | 48.2 | 29.7 | 6.1 |
| 完整算法 | 57.5 | 46.1 | 48.7 | 30.1 | 6.3 |
| 模块组合 | P/% | R/% | mAP₅₀/% | mAP₅₀:₉₅/% | 模型/MB |
|---|---|---|---|---|---|
| YOLOv8n | 51.5 | 35.6 | 36.3 | 15.7 | 6.3 |
| +HCTB | 53.6 | 35.9 | 36.6 | 16.0 | 5.5 |
| +HCTB+OKCSM | 53.7 | 36.4 | 37.0 | 15.8 | 6.1 |
| 完整算法 | 55.1 | 36.9 | 38.4 | 16.4 | 6.3 |
消融实验关键发现
HCTB模块效果
混合架构在保持精度的同时有效降低了参数量
OKCSM模块效果
特征融合优化显著改善了小目标检测性能
MDSKC模块效果
多尺度特征提取进一步完善了算法性能
综合性能对比分析
| 算法 | P/% | R/% | mAP₅₀/% | mAP₅₀:₉₅/% | 大小/MB | GFLOPs |
|---|---|---|---|---|---|---|
| YOLOv3-tiny | 46.3 | 34.8 | 34.9 | 20.4 | 19.2 | 14.3 |
| YOLOv5s | 56.9 | 45.0 | 46.8 | 28.1 | 14.6 | 16.0 |
| YOLOv6n | 49.1 | 39.6 | 40.4 | 28.1 | 8.6 | 11.5 |
| YOLOv7-tiny | 56.7 | 47.8 | 47.3 | 28.8 | 12.1 | 13.2 |
| YOLOv8n | 56.2 | 43.0 | 45.7 | 28.2 | 6.3 | 8.7 |
| HIC-YOLOv5n | 51.0 | 43.5 | 43.5 | 26.8 | 6.6 | 9.1 |
| Drone-YOLO | 54.3 | 43.7 | 45.1 | 27.9 | 6.5 | 8.9 |
| 本文算法 | 57.5 | 46.1 | 48.7 | 30.1 | 6.3 | 11.3 |
| 算法 | P/% | R/% | mAP₅₀/% | mAP₅₀:₉₅/% | 大小/MB | GFLOPs |
|---|---|---|---|---|---|---|
| YOLOv3-tiny | 46.8 | 32.1 | 32.4 | 13.8 | 19.2 | 14.3 |
| YOLOv5s | 52.3 | 36.8 | 37.2 | 15.9 | 14.6 | 16.0 |
| YOLOv6n | 49.7 | 34.2 | 34.8 | 14.6 | 8.6 | 11.5 |
| YOLOv7-tiny | 51.8 | 35.4 | 36.1 | 15.2 | 12.1 | 13.2 |
| YOLOv8n | 51.5 | 35.6 | 36.3 | 15.7 | 6.3 | 8.7 |
| HIC-YOLOv5n | 52.0 | 38.5 | 36.9 | 15.4 | 6.6 | 9.1 |
| Drone-YOLO | 52.5 | 37.2 | 36.6 | 15.3 | 6.5 | 8.9 |
| 本文算法 | 55.1 | 36.9 | 38.4 | 16.4 | 6.3 | 11.3 |
性能优势总结
mAP₅₀提升
相比YOLOv8n基线
mAP₅₀:₉₅提升
高精度阈值下表现优异
模型大小
轻量化设计保持不变
计算复杂度
适中的计算开销
结论与展望
主要贡献总结
① 混合特征提取创新
提出HCTB模块,有效结合CNN局部特征提取与Transformer全局建模能力,在减少参数量的同时提升了特征表达能力
② 多尺度特征融合优化
设计MDSKC模块,通过共享卷积核的多膨胀率处理,高效获取多尺度上下文信息,相比传统池化方法保留更多细节
③ 小目标检测增强
构建P2-P3融合分支并引入OKCSM模块,在不增加检测头的情况下显著提升小目标检测性能
④ 综合性能提升
在VisDrone2019和TinyPerson数据集上验证了算法的有效性,mAP₅₀分别提升3.0%和2.1%
未来研究方向
🔬 算法优化方向
- • 进一步优化Transformer分支的计算效率
- • 探索更高效的多尺度特征融合策略
- • 研究自适应膨胀率选择机制
🌐 应用拓展方向
- • 扩展到视频序列中的小目标跟踪
- • 适配更多类型的小目标检测任务
- • 结合边缘计算进行实时部署
⚡ 技术融合方向
- • 集成更先进的注意力机制
- • 探索神经架构搜索(NAS)优化
- • 结合知识蒸馏进一步压缩模型
📊 评估完善方向
- • 在更多数据集上验证算法泛化性
- • 建立更全面的小目标检测评估体系
- • 分析不同场景下的性能表现
研究成果亮点
三个核心模块协同工作,形成完整的小目标检测解决方案
轻量化设计适合实际部署,计算开销合理可控
在多个数据集上验证了算法的优越性和泛化能力
本研究通过混合特征提取与多尺度融合的创新设计,为光学小目标检测提供了一种高效可行的解决方案,
在保持轻量化特性的同时显著提升了检测精度,
为相关领域的实际应用奠定了坚实基础。