研究概述
研究背景
跨视角图像地理定位技术作为GNSS之外的第二个精确位置信息来源,在无人机导航、目标定位等现实任务中发挥重要作用。然而,现有方法面临高质量标注样本稀缺和空间布局特征建模缺失的挑战。
视觉基础模型
参数高效微调
核心创新
- 采用Conv-LoRA微调的DINOv2大模型作为特征编码器
- 设计基于Mamba的空间关系感知特征聚合器(MSRA)
- 采用InfoNCE损失函数优化对比学习
网络架构
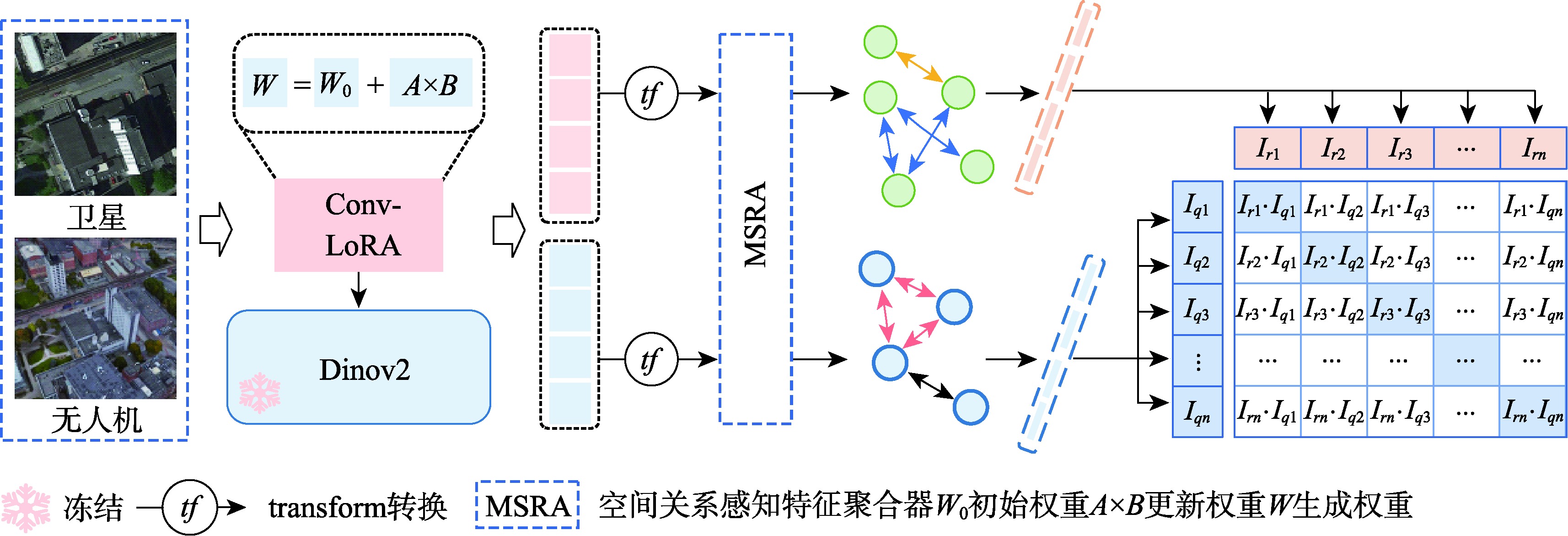
图1 DINO-MSRA网络架构
特征编码器
基于DINOv2大模型,通过Conv-LoRA微调策略实现参数高效的特征提取,仅需19.2%的参数量即可达到优异性能。
MSRA聚合器
基于Mamba模块设计的空间关系感知特征聚合器,有效捕捉特征间的几何空间配置信息。
损失函数
采用InfoNCE损失函数,充分利用批次内所有负样本,提升模型泛化性和整体性能。
实验结果
University-1652数据集
| 任务类型 | R@1精度 | AP精度 | 相比CAMP提升 |
|---|---|---|---|
| 无人机定位 (无人机→卫星) | 95.14% | 95.92% | +0.68% |
| 无人机导航 (卫星→无人机) | 97.29% | 93.81% | +1.14% |
SUES-200数据集 (150m高度)
无人机定位任务
R@1精度:
97.2%
相比CAMP:
+1.8%
无人机导航任务
R@1精度:
98.75%
相比CAMP:
+2.5%
Conv-LoRA微调策略
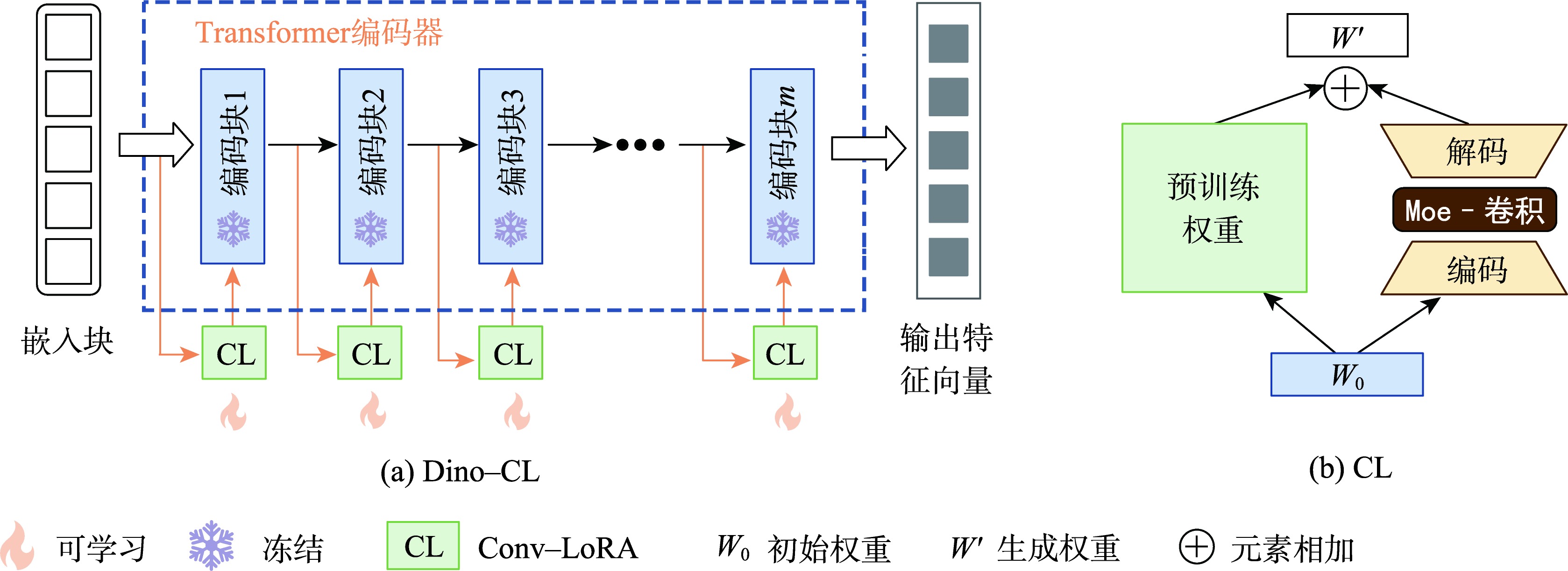
图2 Dinov2-CL架构
结合卷积神经网络和低秩自适应技术
通过局部空间操作引入图像相关的局部先验知识
多个并行卷积专家模块实现多尺度特征表达
MSRA特征聚合器
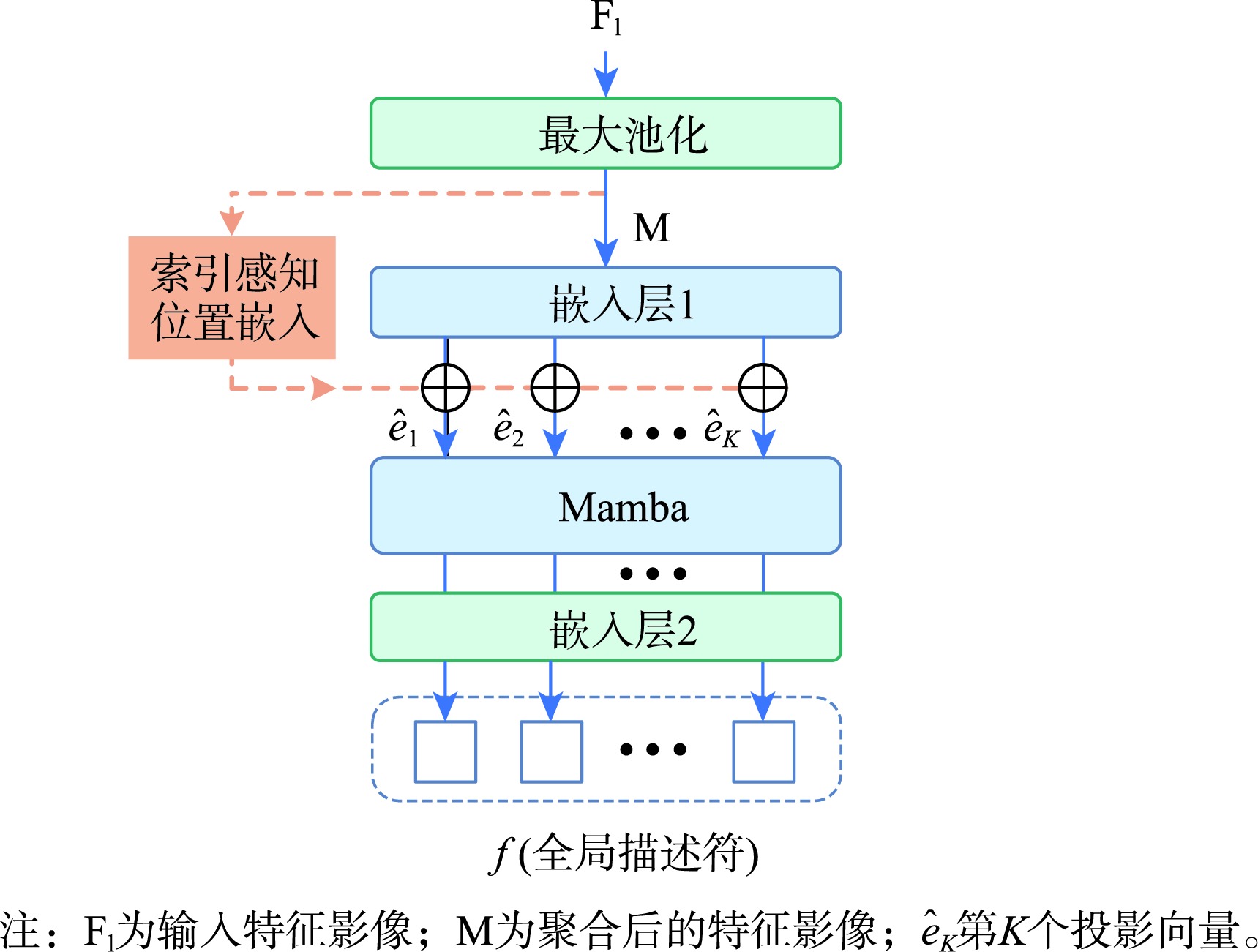
图3 基于Mamba的空间关系感知特征聚合器
基于Mamba模块构建,继承长序列数据建模优势
通过索引感知位置嵌入增强空间配置关系
有效捕捉特征间相关性,提供轻量化高效处理
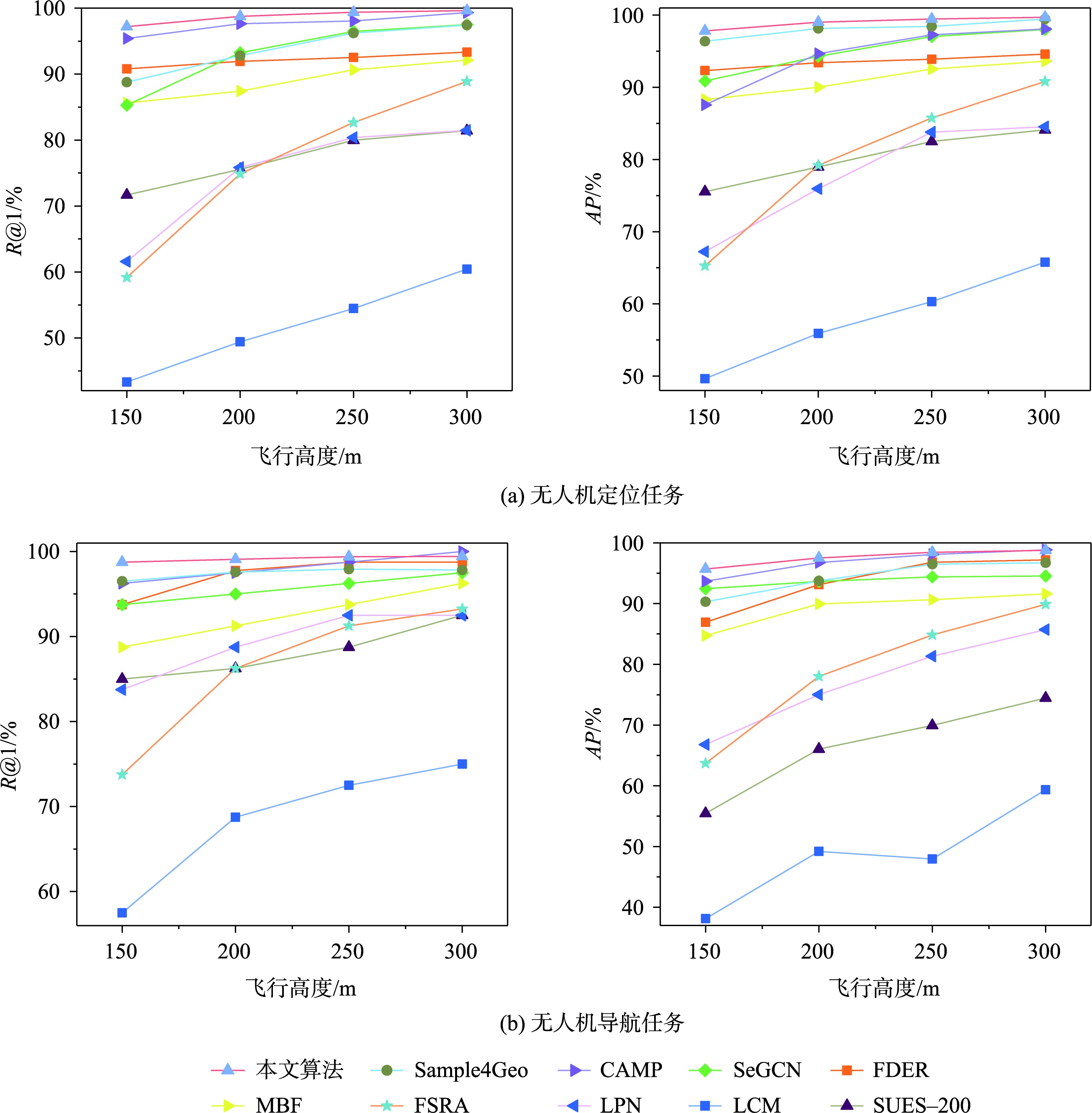
图4 各算法在SUES-200数据集上的对比实验
检索结果可视化

图5 检索结果可视化
Top1准确率
大部分查询影像都可以在Top1检索到正确影像
Top5覆盖率
所有查询影像都可以在Top5检索到正确影像
多高度适应
在不同飞行高度下均能提供稳健的检索定位能力
主要贡献与优势
技术创新
- 首次将视觉基础模型DINOv2应用于跨视角图像检索定位
- 创新性地设计了基于Mamba的空间关系感知特征聚合器
- 有效解决了高质量标注样本稀缺的问题
性能优势
- 参数量仅为Sample4Geo的19.2%,显著降低计算成本
- 在多个数据集上均达到当前最优性能
- 具有良好的泛化能力和实际应用潜力
* 以上内容由AI自动生成,内容仅供参考。对于因使用本网站以上内容产生的相关后果,本网站不承担任何商业和法律责任。