研究背景与挑战
探索轨迹数据挖掘领域的前沿问题与技术突破
现有方法的局限性
忽略道路网络约束
传统方法仅依赖几何距离或速度变化,未充分考虑实际道路结构与通行规则
计算复杂度高
面对大规模城市轨迹数据时,大部分算法计算复杂度较高,实时性不足
误判率较高
复杂交通环境中,常出现合理绕行被误判为异常的情况,影响检测实用性
轨迹异常检测算法框架
核心技术创新
MMTC算法的三大技术突破与创新优势
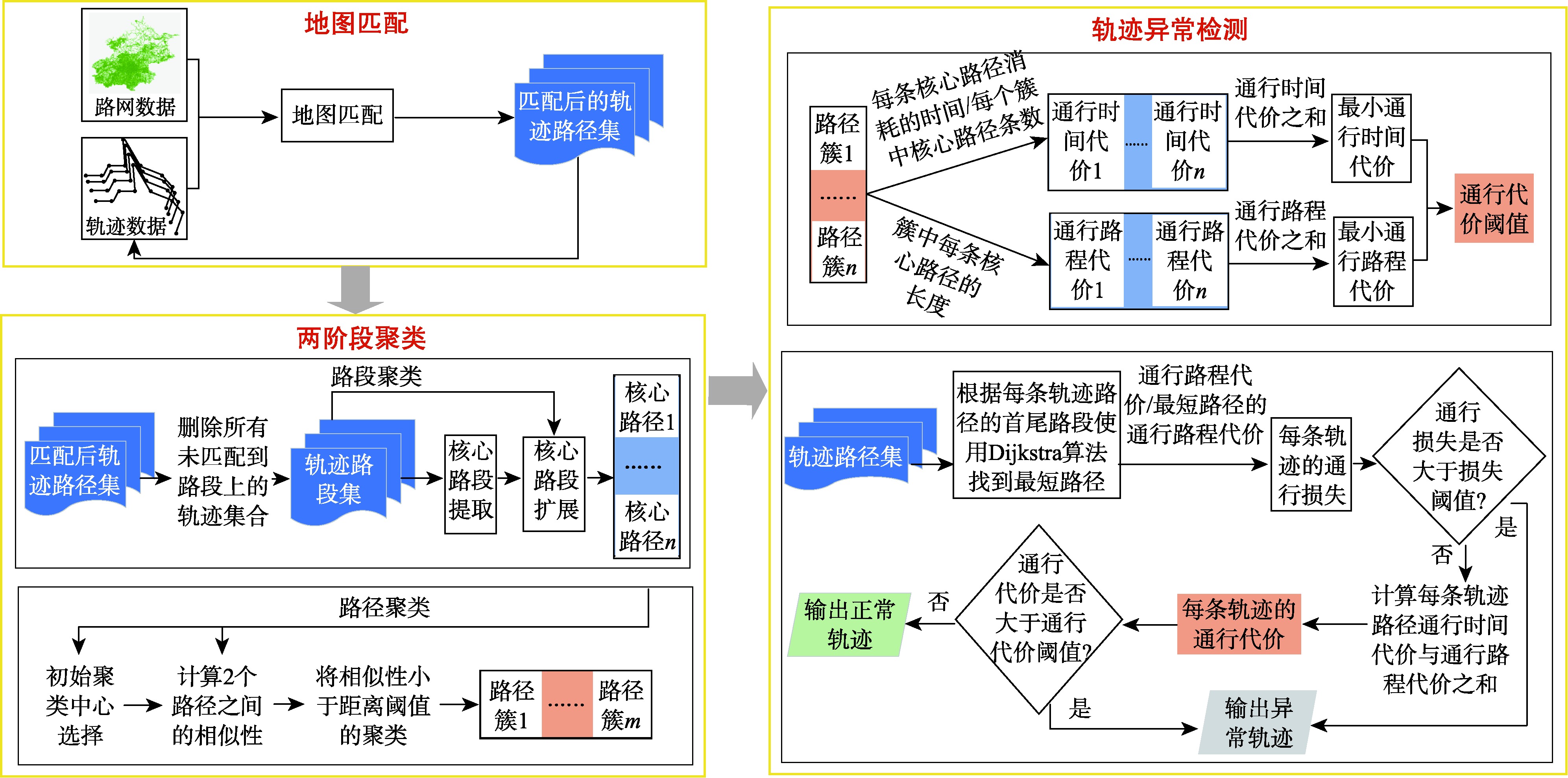
地图匹配技术
通过精准的地图匹配算法,将GPS轨迹数据映射至实际道路网络, 生成符合真实道路布局的路径序列
D(pji, li) k ≤ 0
D(pji, t) 0 < k < 1
D(pji, lj) k ≥ 1
}
- • 候选路段智能筛选
- • 最优路段精确匹配
- • Dijkstra算法路径补全
两阶段聚类
创新性的两阶段聚类策略,先基于路段密度提取核心路径, 再按几何-拓扑相似性生成高质量路径簇
d = DenV(rt) / Σ DenV(ri)
c = RSC(r, rt) / DenV(r)
a = (π - σ(r, rt)) / π
- • 密度驱动核心路径提取
- • 相似性度量路径合并
- • 多尺度路径簇生成
异常检测判定
结合通行时间与路程代价的多维度评估体系, 通过智能阈值比较实现精准异常轨迹识别
RouteLoss = routeT / LossR
异常判定: RouteLoss > LossThreshold
或 CostT > e × CostThreshold
- • 时间-路程代价综合评估
- • 最短路径偏离度分析
- • 双重阈值异常判定
数学模型与核心定义
算法的理论基础与数学建模
轨迹与路网定义
其中: pji = ⟨lonji, latji, timeji⟩
V = {l₁, l₂, l₃, ..., lm}
E = {(eid, li, lj) | li, lj ∈ V}
+ sin(lat₁)sin(lat₂))
其中: R = 6371 km (地球半径)
相似性与代价模型
基于路径间形成的封闭多边形面积计算
S = ½|Σi=1n(xiyi+1 - xi+1yi)|
Rdist(Tri) = D(p₁i, p₂i) + ... + D(pleni-1i, plenii)
异常条件: CostT > e × CostThreshold
实验数据集与环境
基于北京市真实出租车轨迹数据的大规模验证
数据集详细信息
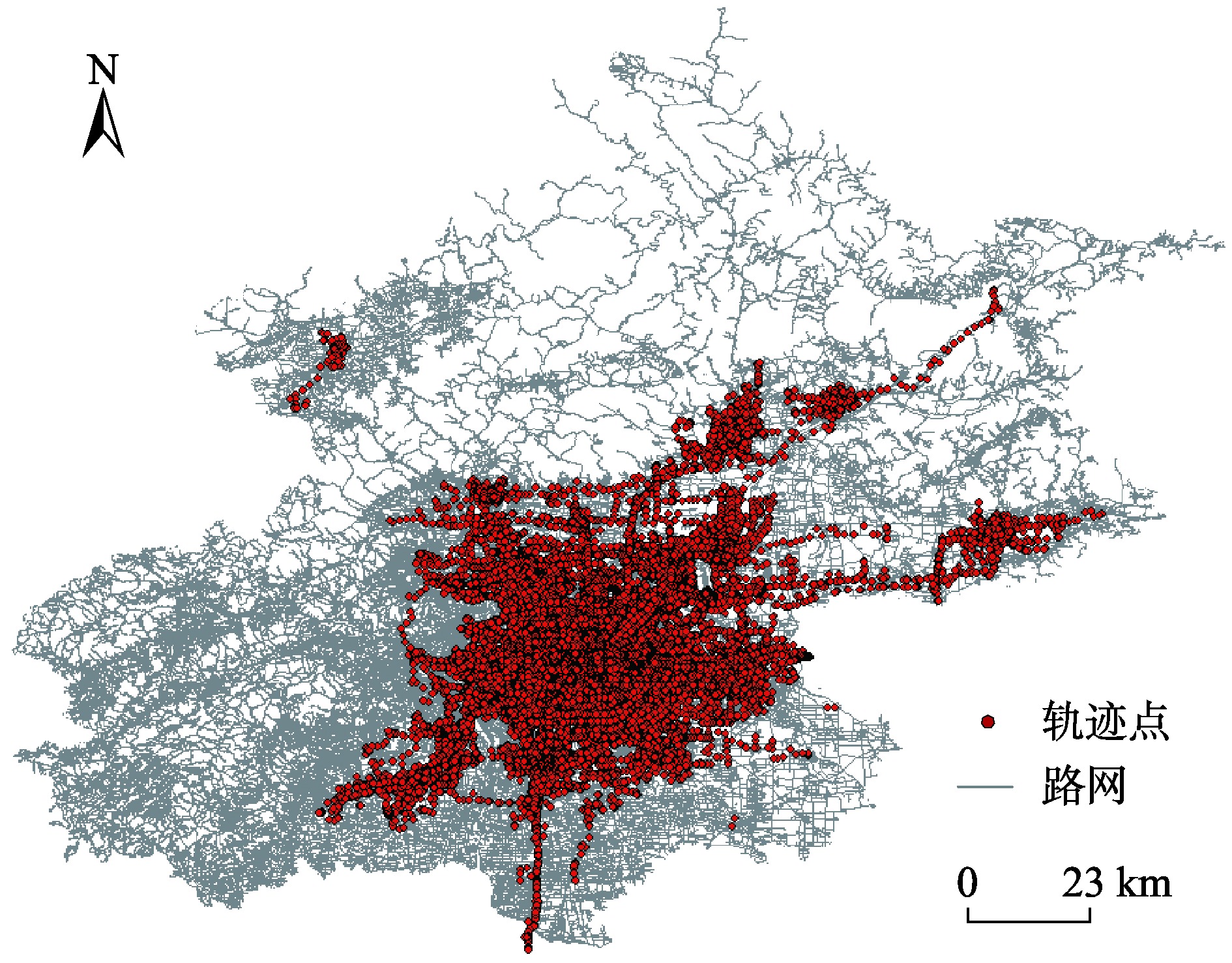
路网数据
2016年北京市全路网数据,覆盖超10万路段与8万节点,双向通行扩展后总路段达18万
轨迹数据
2017年3月1日早高峰(8:00-9:00)采集的1万辆出租车GPS数据,平均采样间隔1分钟
数据特征
平均距离间隔658m,时间间隔60s,通过方位角聚类划分为4个子集进行验证
轨迹数据集统计信息
| 数据集 | 轨迹总数 | 正常轨迹 | 异常轨迹 | 异常比例 |
|---|---|---|---|---|
| T1 | 2,620 | 1,872 | 748 | 28.5% |
| T2 | 2,008 | 1,417 | 591 | 29.4% |
| T3 | 2,796 | 2,005 | 791 | 28.3% |
| T4 | 2,463 | 1,647 | 816 | 33.1% |
性能评估与对比分析
MMTC算法相较于传统方法的显著性能提升
核心性能指标
准确率提升
相比STADCS算法
F1分数提升
相比ATDC算法
F1分数提升
相比Two Phase算法
运行时间
效率大幅提升
详细性能对比
| 算法 | 准确率 | 精确率 | 召回率 | F1分数 |
|---|---|---|---|---|
| MMTC | 0.880 | 0.897 | 0.930 | 0.918 |
| STADCS | 0.790 | 0.812 | 0.856 | 0.834 |
| Two Phase | 0.823 | 0.845 | 0.878 | 0.851 |
| ATDC | 0.798 | 0.821 | 0.834 | 0.823 |
运行时间对比
轨迹异常检测可视化
真实场景下的异常轨迹识别效果展示
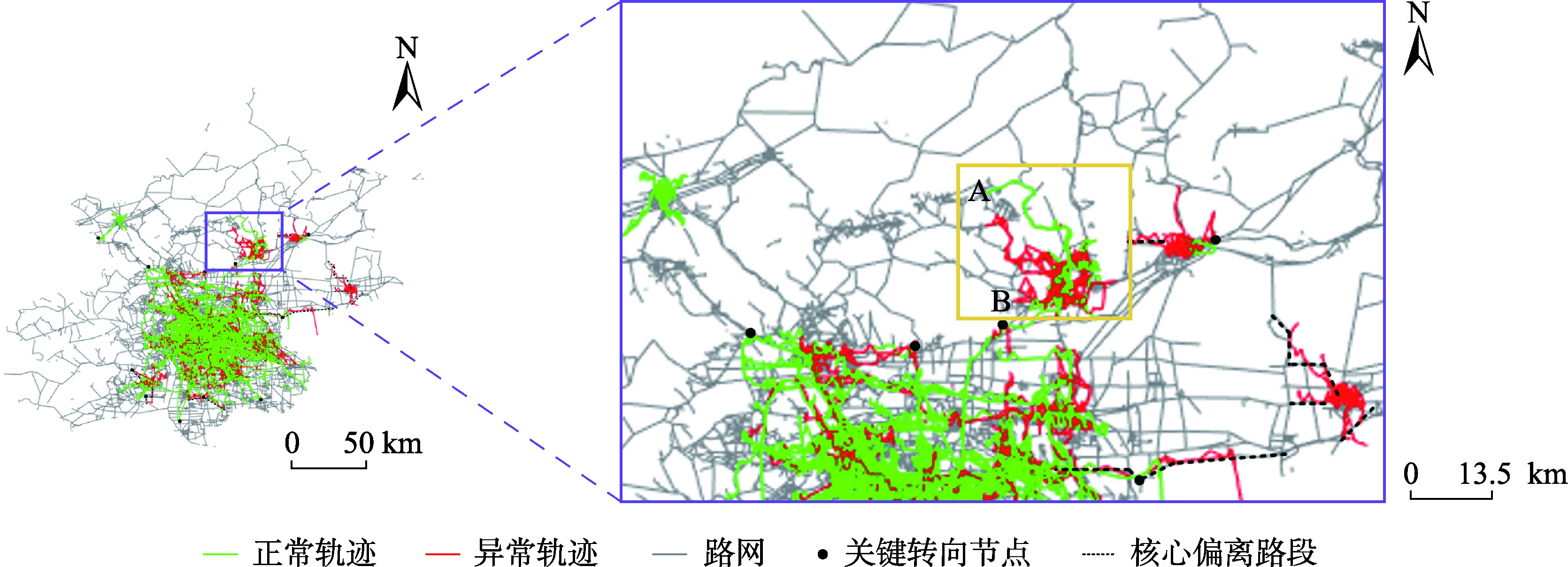
检测结果分析
正常轨迹特征
- • 与最短路径高度重合
- • 在主干道密集分布
- • 转向规律性强
- • 通行代价在合理范围内
异常轨迹特征
- • 明显偏离最短路径
- • 在支路频繁无意义迂回
- • 连续多段路径异常
- • 通行代价显著超标
关键发现
通过对北京市核心区域的轨迹分析发现,异常轨迹主要集中在交通枢纽附近, 表现为明显的绕行模式。MMTC算法能够精准识别这些偏离正常路径的行为, 同时有效区分合理的交通避让与恶意的欺诈绕行,为智慧交通管理提供了可靠的技术支撑。
应用价值与发展前景
MMTC算法在智慧交通领域的广阔应用前景
出租车监管
精准识别出租车司机的欺诈绕行行为,保护乘客权益, 提升出租车行业服务质量和诚信水平。
- • 实时欺诈行为检测
- • 司机信用评级系统
- • 乘客权益保护
- • 行业监管支持
交通管理
为城市交通管理部门提供数据支撑,优化交通流量分配, 提升道路使用效率和交通安全水平。
- • 交通流量优化
- • 拥堵预警系统
- • 路网规划支持
- • 智能信号控制
数据挖掘
深度挖掘车辆轨迹数据价值,为城市规划、商业分析、 物流优化等领域提供智能化解决方案。
- • 出行模式分析
- • 商圈热力图
- • 物流路径优化
- • 城市规划支持
算法局限性与改进方向
持续优化与技术发展的未来路径
当前局限性
稀疏数据适应性
对低采样频率GPS场景适应性不足,轨迹点间隔过大时地图匹配精度下降, 簇内平均相似度降低约8.13%
实时处理效率
大规模实时处理场景中,Dijkstra最短路径计算和两阶段聚类过程仍可能成为性能瓶颈
时间维度建模
仅考虑通行时间和速度代价,忽略轨迹停留时间变化,对复杂时间模式识别不足
改进方向
时空插值技术
引入历史轨迹模式挖掘和路网拓扑约束,推断缺失轨迹点位置, 融合多源异构数据提升稀疏场景适应能力
并行计算优化
探索近似算法简化计算过程,采用并行计算技术充分利用多核处理器, 满足交通流量实时监测需求
多维特征融合
对停留时间建模,结合驾驶行为特征进行联合分析, 探索跨领域迁移能力验证算法普适性
技术创新总结
MMTC算法的核心贡献与技术突破
路网约束融合
首次深度融合道路网络结构与约束信息, 通过地图匹配技术实现轨迹与实际路网的精准映射, 显著提升异常检测的准确性和实用性
两阶段聚类创新
创新性的两阶段聚类策略, 先基于路段密度提取核心路径,再按相似性生成路径簇, 有效降低计算复杂度并提升聚类质量
多维异常判据
结合通行时间与路程代价的综合评估体系, 通过双重阈值机制精准区分合理绕行与异常轨迹, 大幅降低误判率
算法核心优势
性能提升
- • 准确率相比STADCS提升9.03%
- • F1分数相比ATDC提升9.45%
- • 运行时间显著优于传统方法
- • 参数鲁棒性强,适应性广
实用价值
- • 适用于复杂城市路网场景
- • 支持大规模轨迹数据处理
- • 为交通管理决策提供支撑
- • 在欺诈检测领域具有重要应用价值