研究概述
研究目标
为提高高速路合流区安全水平并揭示交通冲突发生机理,研究合流区交通冲突预测及成因问题,构建融合高维特征选择、混合预测模型与解释性分析的技术框架。
核心创新
整合Exid高精度轨迹数据与Lanelet2高清地图,构建多维时空特征数据库,运用ResCNN模型实现高精度冲突预测,并通过SHAP算法提供模型可解释性分析。
性能表现
技术路线
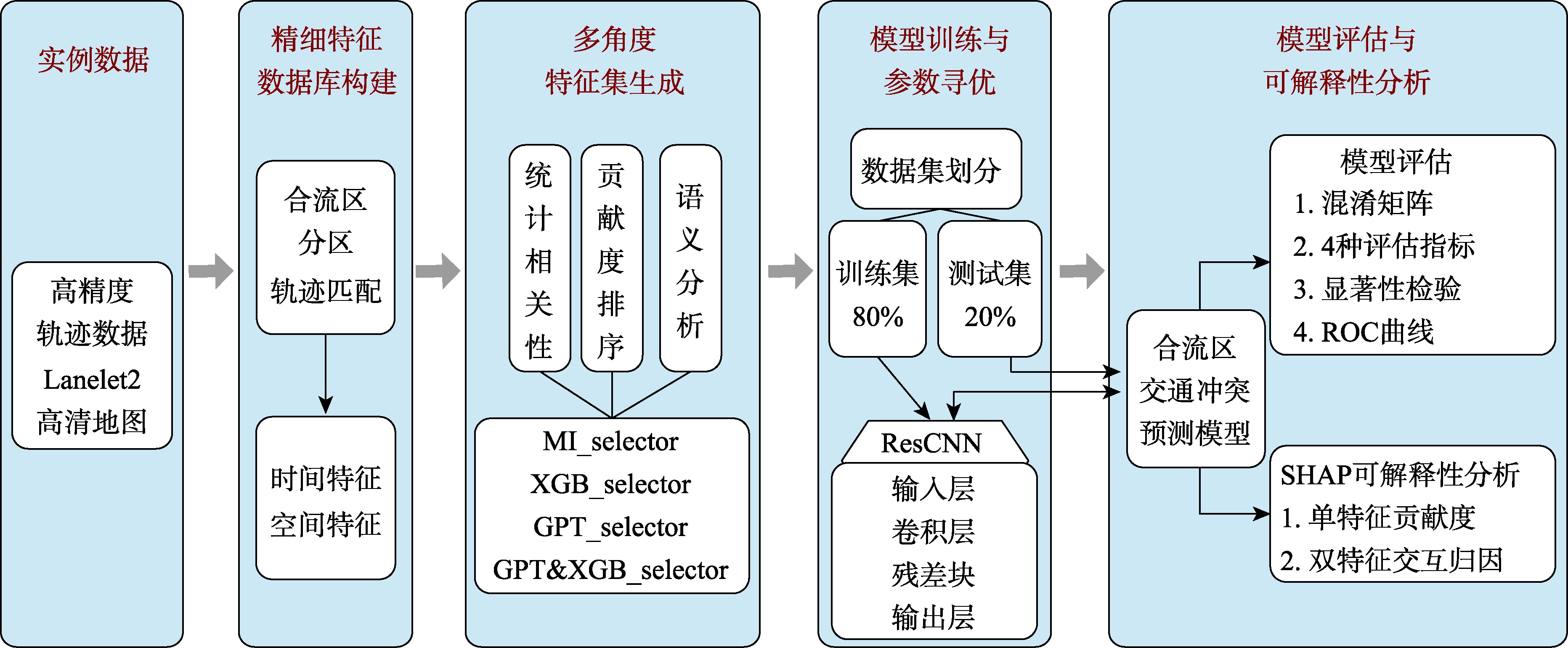
数据构建
整合Exid轨迹数据与Lanelet2地图
特征筛选
MI、XGBoost、GPT多角度特征选择
模型优化
ResCNN残差卷积神经网络
可解释性分析
SHAP算法机理解析
数据来源
高精度多维时空特征数据库
通过整合Exid高精度轨迹数据与Lanelet2高清地图,构建涵盖车辆轨迹、道路几何、交通流特征的综合数据库。
Exid轨迹数据
- • 高精度车辆轨迹信息
- • 速度、加速度等动态参数
- • 车辆交互行为数据
- • 时空分布特征
Lanelet2高清地图
- • 道路几何结构信息
- • 车道线精确定位
- • 合流区域边界标识
- • 交通标志与信号
特征选择方法
互信息(MI)方法
- 衡量特征与目标变量的相关性
- 捕捉非线性关系
- 信息论基础的特征评价
XGBoost算法
- 基于梯度提升的特征重要性
- 处理高维特征空间
- 自动特征交互识别
GPT特征选择
- 智能语义理解特征关联
- 领域知识融合筛选
- 多角度特征评估
ResCNN模型架构
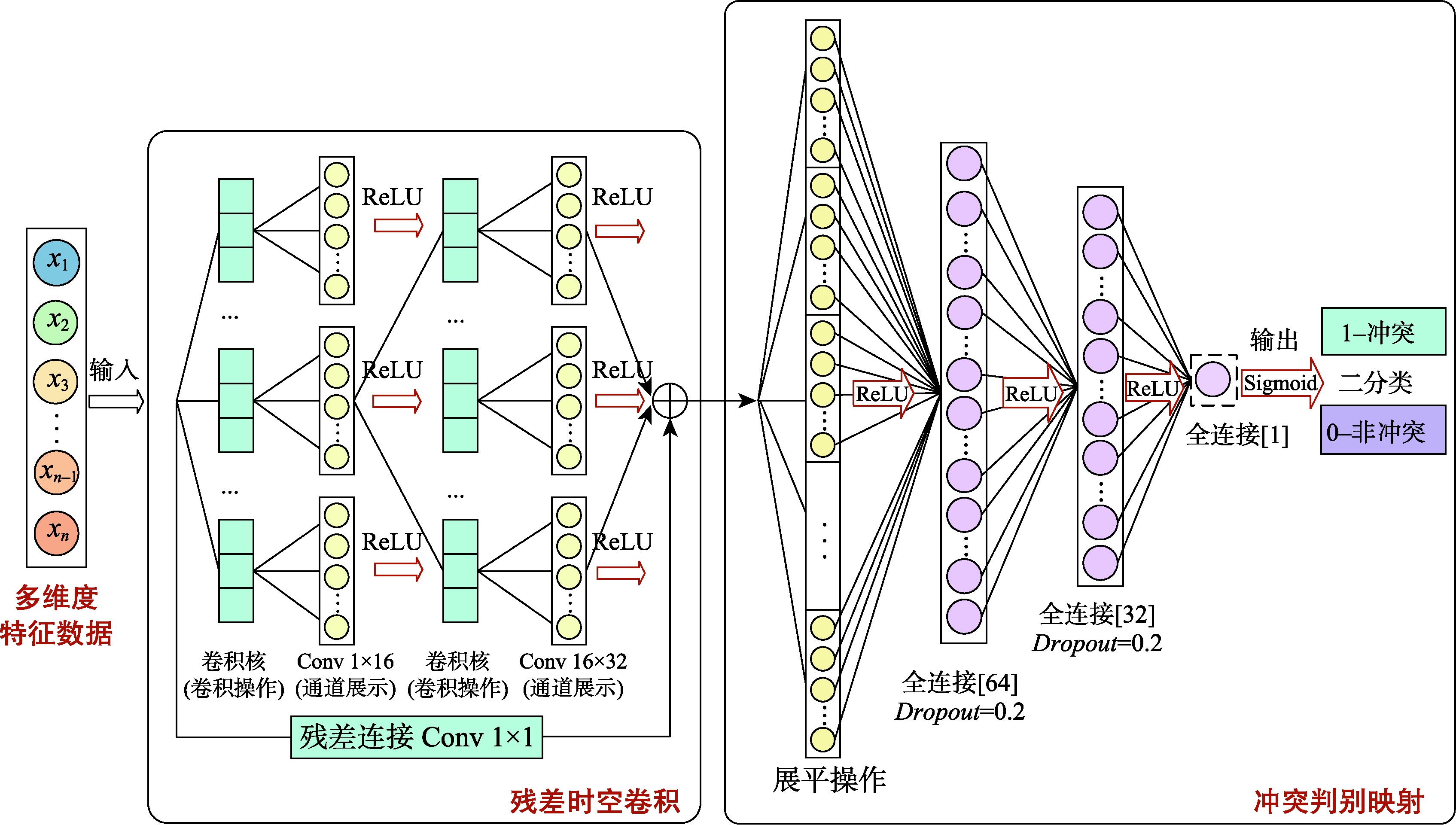
模型特点
- 残差连接解决梯度消失问题
- 卷积层提取空间特征
- 深度网络捕捉复杂模式
技术优势
- 高精度冲突识别能力
- 强泛化性与适应性
- 低误判率与高召回率
模型对比分析
ResCNN与其他模型性能对比
| 模型 | 类型 | 核心特点 | 性能表现 |
|---|---|---|---|
| ResCNN | 残差卷积网络 | 残差连接+卷积特征提取 | 最优(99.27%) |
| CNN | 卷积神经网络 | 传统卷积特征提取 | 良好 |
| AttCNN | 注意力卷积网络 | 注意力机制+卷积 | 良好 |
| ConvXGB | 混合模型 | 卷积+XGBoost集成 | 中等 |
| Transformer | 注意力模型 | 自注意力机制 | 中等 |
| GraphSAGE | 图神经网络 | 图结构特征学习 | 中等 |
SHAP可解释性分析
单特征贡献度分析
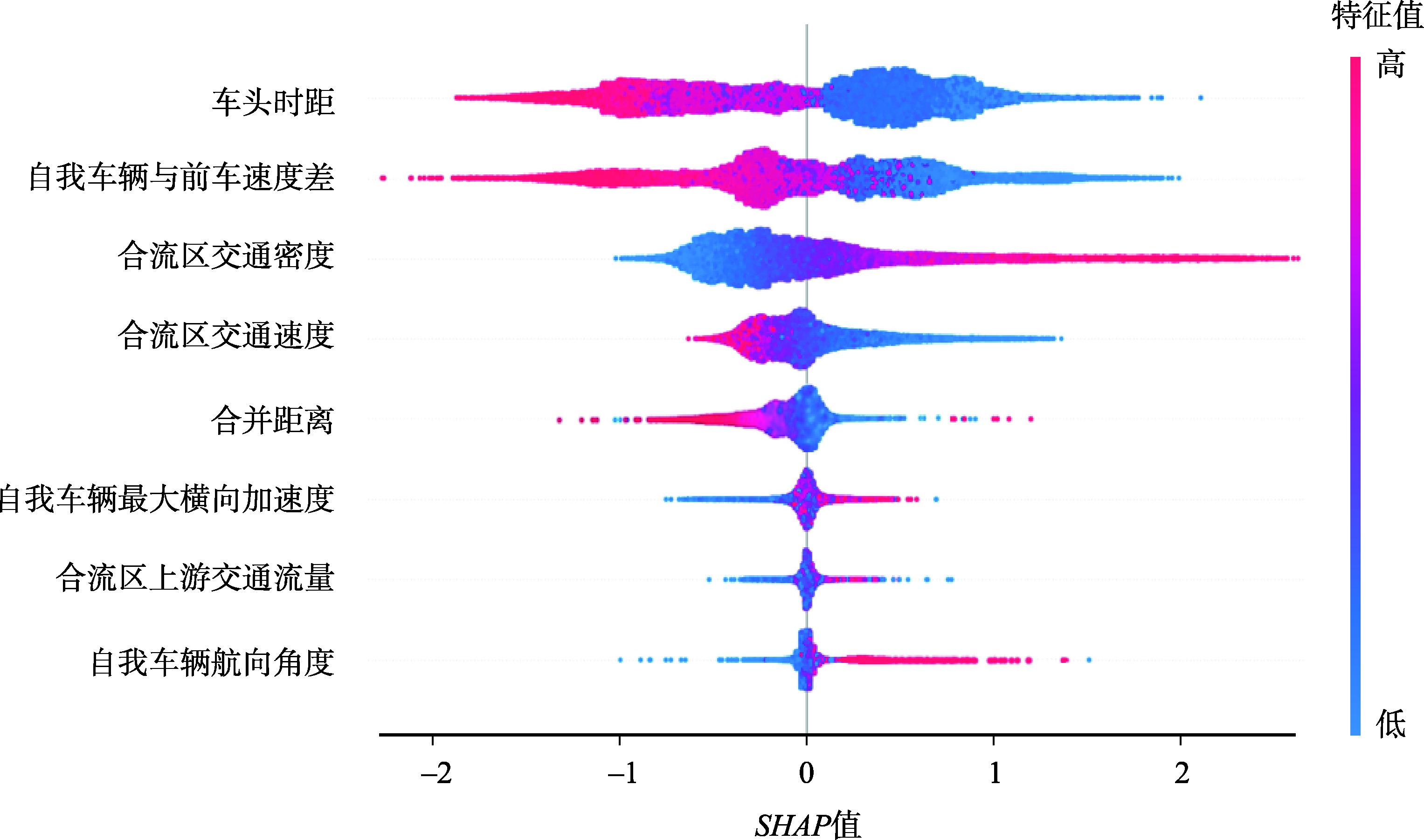
车头时距
核心安全指标
速度差
冲突风险因子
横向距离
空间安全指标
加速度
动态行为特征
双特征交互效应分析
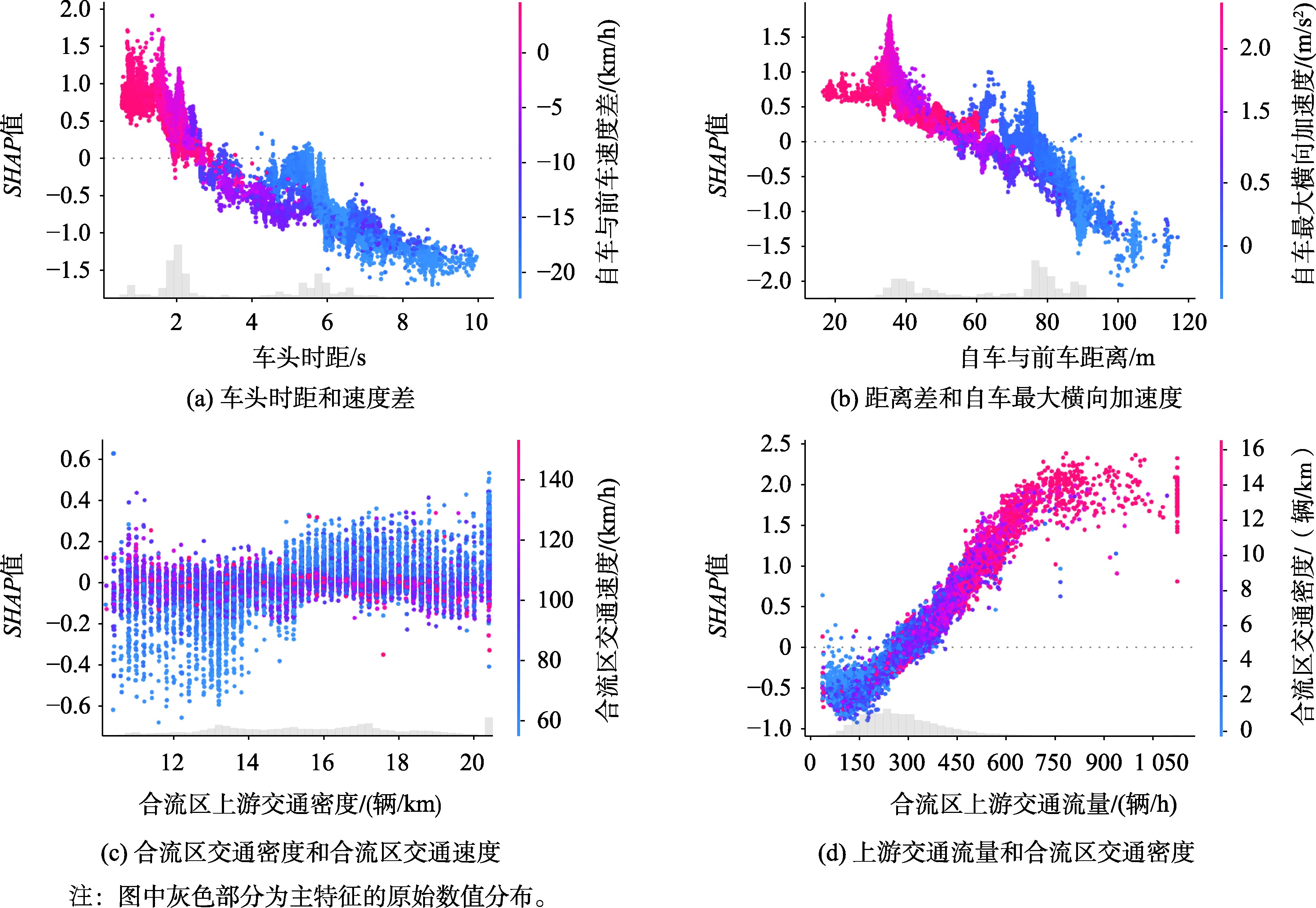
关键交互关系
- • 车头时距 × 速度差:安全临界组合
- • 横向距离 × 加速度:空间动态耦合
- • 合流角度 × 车辆密度:几何流量影响
- • 驾驶行为 × 环境因素:人机环境交互
机理发现
- • 复杂非线性交互效应识别
- • 多因素耦合风险阈值确定
- • 冲突演化路径机制解析
- • 预防性干预策略指导
统计显著性验证
Friedman-Nemenyi检验
- P值远小于置信水平
- 平均位次差大于临界值
- 统计显著性优势确认
AUC检测能力
- 最陡峭上升趋势曲线
- 各特征集下均表现最优
- 强冲突检测识别能力
应用前景
自动驾驶
提升自动驾驶车辆主动避险能力
安全预警
实时交通冲突预警系统
智能交通
智能交通系统优化决策
道路设计
合流区安全设计优化
主动安全
主动安全防控体系构建
风险评估
交通安全风险量化评估
研究创新点
技术创新
- 多维特征融合技术框架
- ResCNN残差网络优化设计
- SHAP深度学习可解释性
方法创新
- MI、XGBoost、GPT多角度特征选择
- 特征交互效应深度解析
- 统计显著性严格验证
本研究通过多维特征融合与 ResCNN深度学习技术, 结合SHAP可解释性分析, 实现了高精度交通冲突预测, 为智能交通系统安全防控提供了新的技术路径。
发展前景
模型优化
进一步优化网络结构,提升实时性能,适应更复杂的交通场景
场景扩展
扩展到城市道路、交叉口等多种交通场景的冲突预测
产业化应用
推动技术成果产业化,为智能交通系统提供核心算法支撑