深度学习方法分类
基于点云输入网络的不同表征方法和数据处理形式
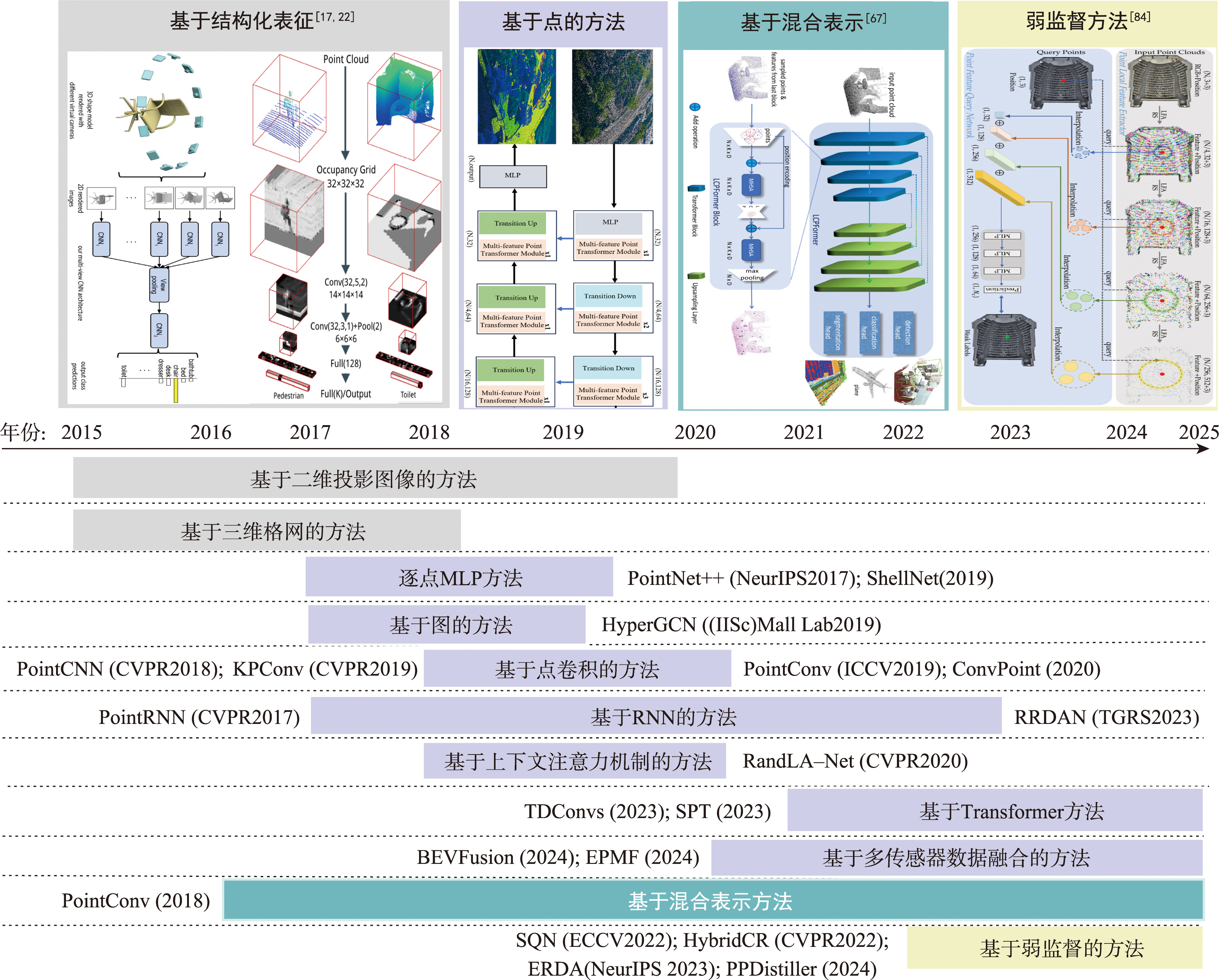
结构化表征方法
- 多视图投影方法
- 三维格网方法
基于点的方法
- 逐点MLP方法
- 点卷积方法
- 基于图的方法
- Transformer方法
混合表示方法
- 多模态融合
- 特征层次混合
弱监督方法
- 对比学习
- 伪标签优化
航空点云基准数据集
12种公开发行的大规模航空点云标准数据集
Vaihingen 3D
年份: 2015
类别: 9/9
面积: 2.4 km²
获取方式: 机载激光雷达
SensatUrban 3D
年份: 2022
类别: 13/13
面积: 7.6 km²
获取方式: 摄影测量
DALES
年份: 2021
类别: 8/8
面积: 10.0 km²
获取方式: 机载激光雷达
方法性能对比分析
不同方法在航空点云数据集上的分割性能
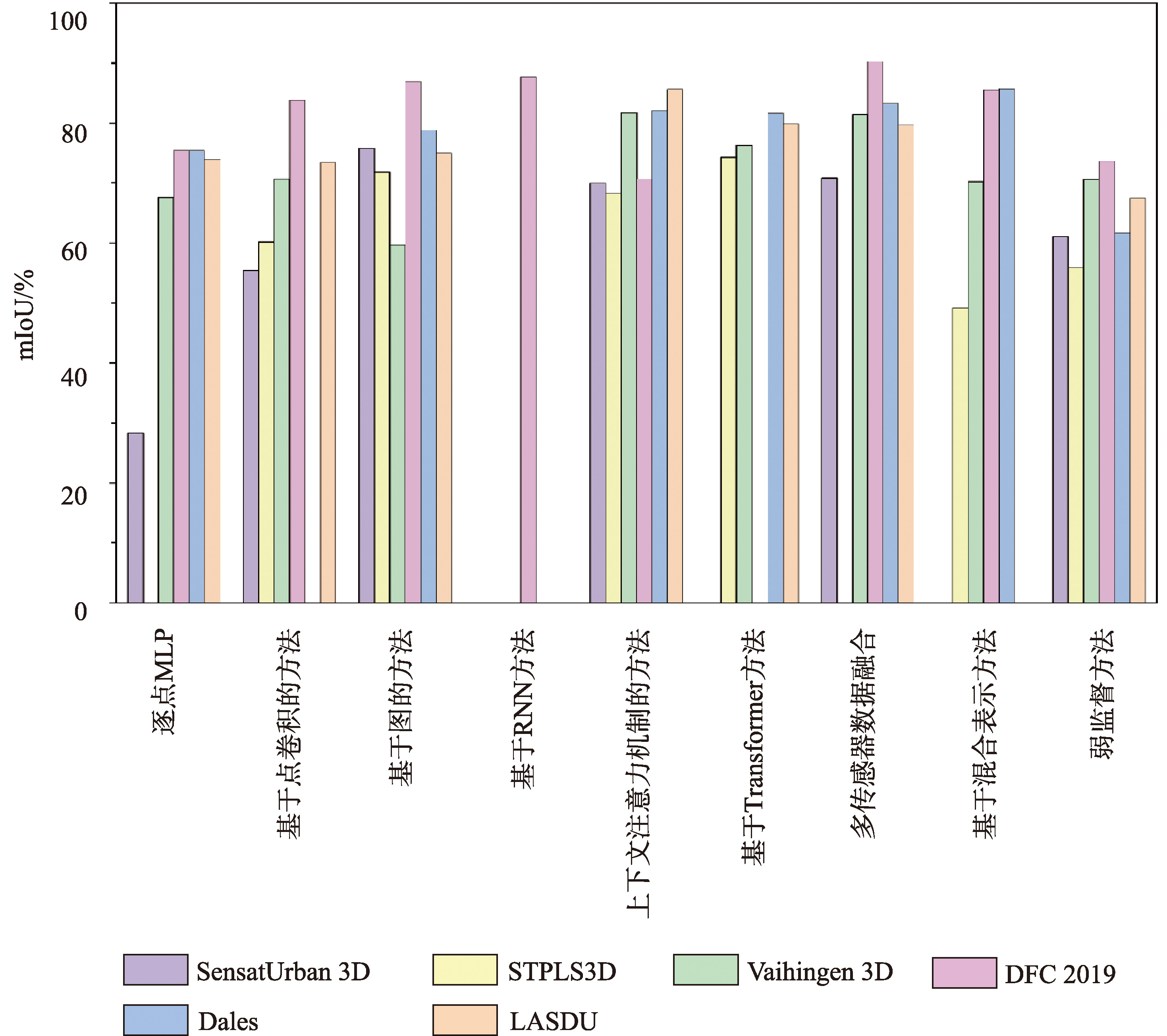
代表性方法性能对比 (mIoU %)
| 方法类别 | 代表方法 | Vaihingen 3D | DALES | SensatUrban 3D |
|---|---|---|---|---|
| 逐点MLP | PointNet++ | 67.7 | 68.3 | 32.9 |
| 点卷积 | KPConv | 76.8 | - | 42.7 |
| 注意力机制 | RandLA-Net | 85.2 | 80.0 | 70.0 |
| 混合表示 | PyramidPoint | 83.4 | 83.6 | - |
技术挑战与瓶颈
航空点云语义分割面临的主要技术难题
数据特性挑战
- 大范围三维地形覆盖
- 动态平台运动误差累积
- 地物空间尺度差异大
- 复杂地物遮挡
算法局限性
- 点云密度不均导致局部特征歧义
- 多尺度地物分割泛化性不足
- 实时处理算力约束
- 跨数据集泛化能力弱
未来发展方向
航空点云语义分割技术的突破方向
高效特征提取
动态邻域感知与自适应特征聚合,层次化多尺度特征融合框架构建
多模态融合
跨模态对齐与协同表征学习,时空-光谱多维特征数据融合
小样本学习
几何感知的自监督预训练框架,元学习驱动的少样本适应网络
算法可解释性
基于梯度反传与类激活映射的多模态特征溯源引擎构建
大模型基准
基于Transformer的跨场景点云预训练框架,动态权重剪枝技术
研究核心贡献
本研究的主要创新点与学术价值
系统性综述
对2015-2025年深度学习点云语义分割方法进行系统回顾,涵盖4大类11种方法,梳理近140篇文献,构建完整的技术发展脉络。
数据集标准化
全面梳理12个典型航空点云基准数据集,包括摄影测量和机载激光雷达数据集,为算法评估提供标准化基础。
性能评测分析
基于mIoU、OA等核心指标,对55种语义分割模型在6种常用数据集上的分割性能进行横向评测和深度分析。
发展路线指引
前瞻性提出5个突破方向,包括特征表达创新、多模态融合、小样本学习等,为领域研究提供理论支撑。
研究结论
基于深度学习的航空点云语义分割技术已从实验室走向实际应用,
基于Transformer方法凭借全局特征建模能力成为主流解决方案,在复杂场景理解方面取得突破性进展。
弱监督策略在低标注率场景展现潜力,但对标签质量敏感。
混合架构设计通过局部-全局特征融合,在保持85% Transformer精度的同时降低40%计算负载。
未来研究需聚焦轻量化架构开发、跨域泛化能力增强以及物理约束驱动的特征学习,
推动技术从实验室走向数字孪生城市、灾害应急响应等重大应用场景。
* 以上内容由AI自动生成,内容仅供参考。对于因使用本网站以上内容产生的相关后果,本网站不承担任何商业和法律责任。