研究背景与目标
由于建筑物屋顶结构复杂多样,机载LiDAR点云密度不均且缺乏语义信息,导致现有基于数据驱动的建筑物三维模型重建框架难以准确构建几何基元间的拓扑关系。 本文在现有屋顶面分割及轮廓线提取算法基础上,提出一种基于跨面片线拓扑匹配的建筑物三维模型重建框架。
技术框架流程
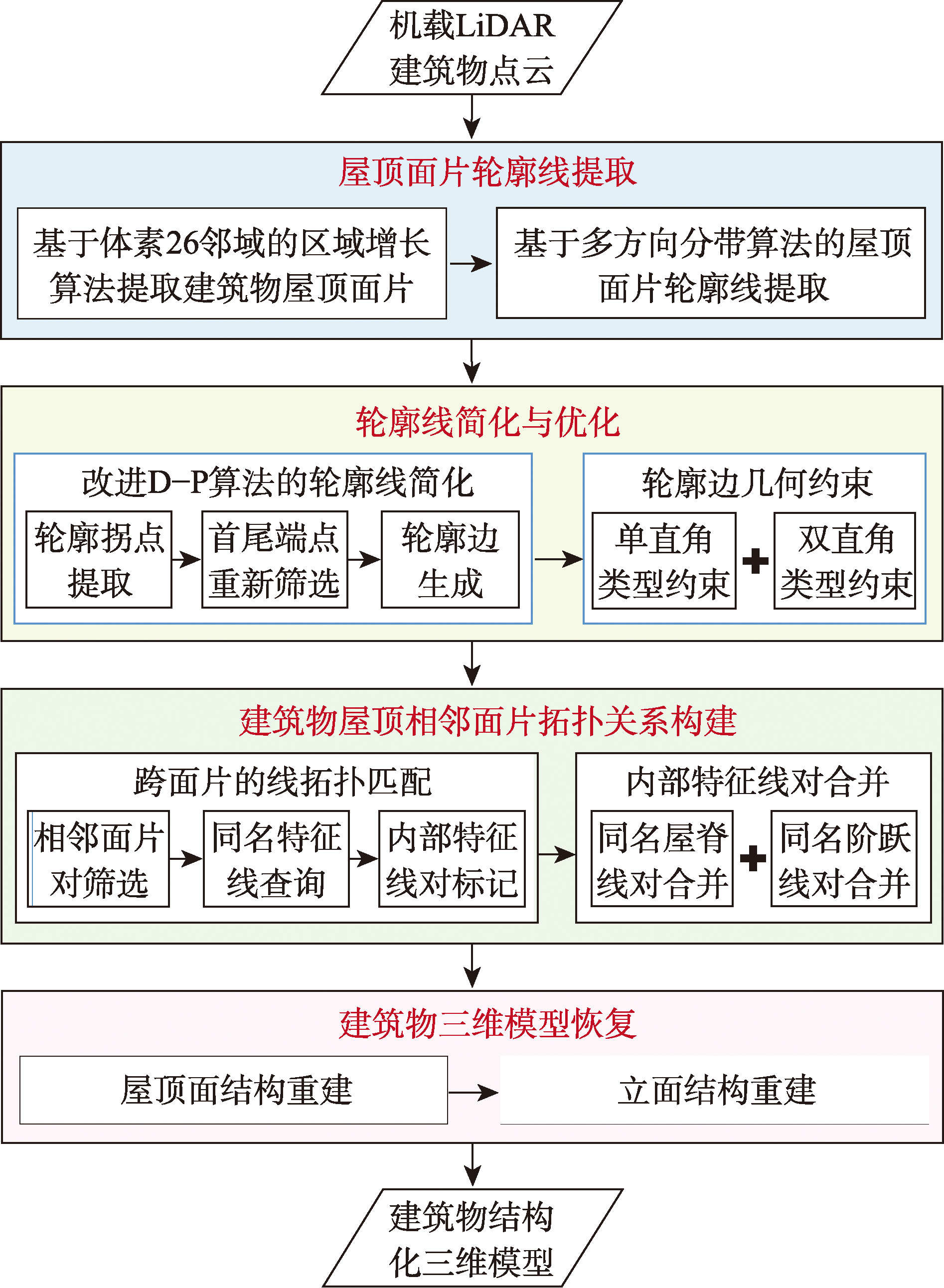
屋顶面片轮廓线提取
采用基于体素增长的屋顶面分割算法提取单栋建筑物点云中的屋顶面片,并利用多方向分带法对分割得到的各屋顶面片分别进行轮廓线提取。
轮廓线简化与优化
联合改进的D-P算法以及建筑物中通用的几何结构特征简化并规则化轮廓线,获取属于各个面片的轮廓边。
拓扑关系构建
根据相邻点对的比例在不同面片的轮廓边中寻找相互匹配的同名屋脊线对和同名阶跃线对,对匹配得到的同名特征线对依次进行合并。
三维模型恢复
采用合并后的各面片轮廓边构建屋顶面以及立面结构,完成建筑物表面结构化三维模型的重建。
算法核心技术
改进D-P算法轮廓线简化
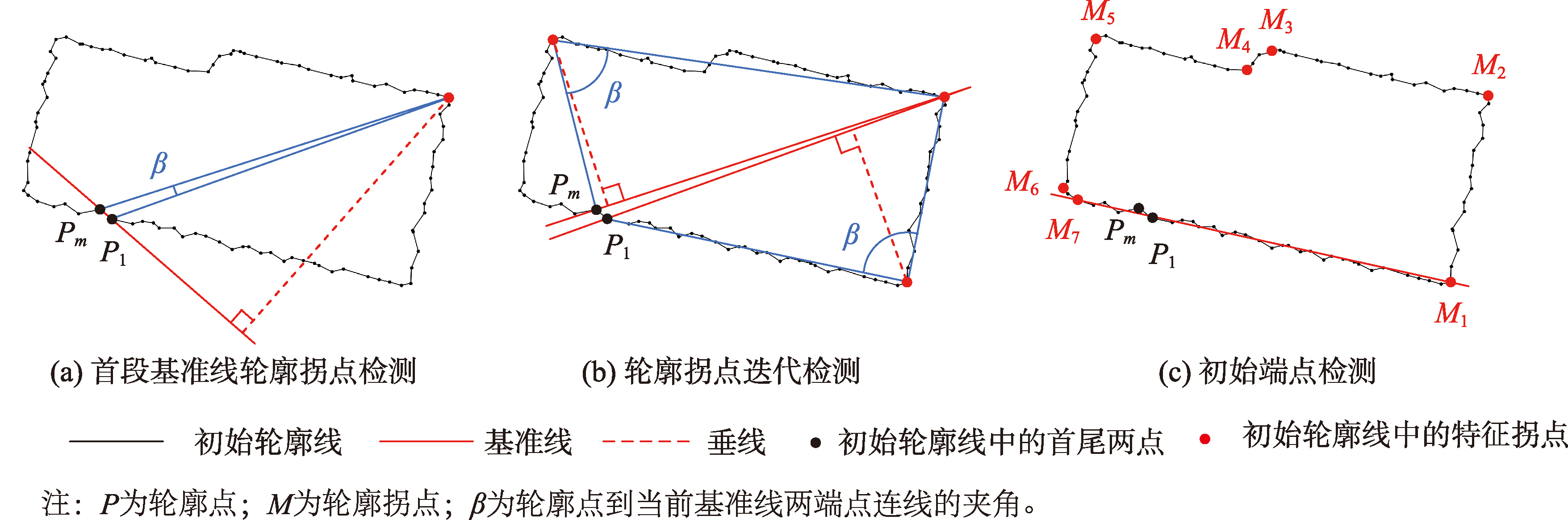
距离阈值:T = k × d(k为倍数,d为平均点间距)
角度约束:夹角β < 160°,确保轮廓拐点的必要性
优化策略:重新筛选闭合轮廓线的首尾端点,限制伪拐点生成
几何约束处理
单直角约束
当80° < θ < 100°时,采用两条轮廓边所在直线的交点替代短边的两个端点
双直角约束
当170° < θ < 180°时,将短边中点沿垂直方向投影至相邻轮廓边所在直线
技术优势对比
拓扑关系构建优势
相比传统RTG(屋顶拓扑图)方法,本文框架能够处理同时包含阶跃和相交关系的相邻屋顶面片,确保屋顶几何基元间拓扑关系稳定和完整的构建。
RTG局限性:每条边具有属性唯一性,无法完整记录复杂建筑物各屋顶面片之间的拓扑关系
强适应性表现
框架对受到遮挡影响、存在部分缺失的点云数据具有较强适应性,能够有效处理女儿墙结构、孔洞缺失等复杂情况。
高精度重建
建筑物三维模型角点坐标偏差控制在平均点间距的2-3倍范围内,模型保真度优于0.168m,重建精度显著提升。
核心技术创新
改进D-P算法
将夹角约束融入D-P算法,优化轮廓拐点检测顺序,减少非结构化轮廓拐点的生成
几何约束优化
对轮廓边进行非强制性的单直角与双直角类型约束,增强对不规则边界的适应性
线拓扑匹配
通过匹配不同面片上同名轮廓边间接建立屋顶面片间的拓扑关系
局限性与展望
当前局限性
- 对原始数据质量要求较高,仅能处理较小范围内的点云缺失
- 缺少立面信息,主要侧重于屋顶结构化三维模型构建
- 对大范围缺失的建筑物点云数据重建效果有限
未来发展方向
- 引入多源数据,构建具有丰富结构信息的立面模型
- 补全屋顶缺失结构,进一步提高重建精度
- 发展更加鲁棒的算法,适应更多复杂场景
研究结论
本文提出的基于跨面片线拓扑匹配的机载LiDAR建筑物点云三维模型重建框架,成功解决了建筑物屋顶几何基元拓扑关系匹配错误导致模型重建失败的问题。
实验验证表明,该框架构建的建筑物三维模型具有屋顶结构完整、适应性强、精度高等特点,能够满足大多数机载LiDAR点云建筑物三维模型重建的工作需求。
通过改进D-P算法、几何约束优化和线拓扑匹配等核心技术创新,为复杂建筑物的自动化三维重建提供了有效的技术解决方案。